I
Изобретение относится к формам I с устройствами для наклона и рпрокидывания и представляет собой гидромеханический опрокидыватель для подъема тяжелых опрокидных форм, находящий свое применение как для стационарных, так и для передвижных опрокидных форм, и позволяющий опрокидывание в необходимое положение.
Известны гидравлические опрокидыватели, у которых гидроцилиндр для подъема опрокидной формы расположен вертикально или на подвеске, но подвижно под опрокидной формой.
В описании изобретения к ацептованной заявке (AS) 21 29 037 гидроцилиндр расположен наклонно под несущей конструкцией опрокидной формы. Такое расположение очень неблагоприятно, так как присоединение рабочего цилиндра производится под очень острым углом по отношению к центру тяжести. Вследствие такого неблйгопоиятного расположения необходима
большая мощность длинноходового гидроцилиндра, чтобы перевести опрокидную форму из исходного положения в положение опрокидывания.
Цель изобретения заключается в разработке гидромеханического опрокидывателя, у которого необходимое для подъема усилие создается с малыми техническими затратами без применения длинноходовых рабочих цилинд10ров. За счет отсутствия длинноходовых гидроцилиндров достигается значительное снижение стоимости, повышение надежности опрокидывателя.
Отличительные признаки данного
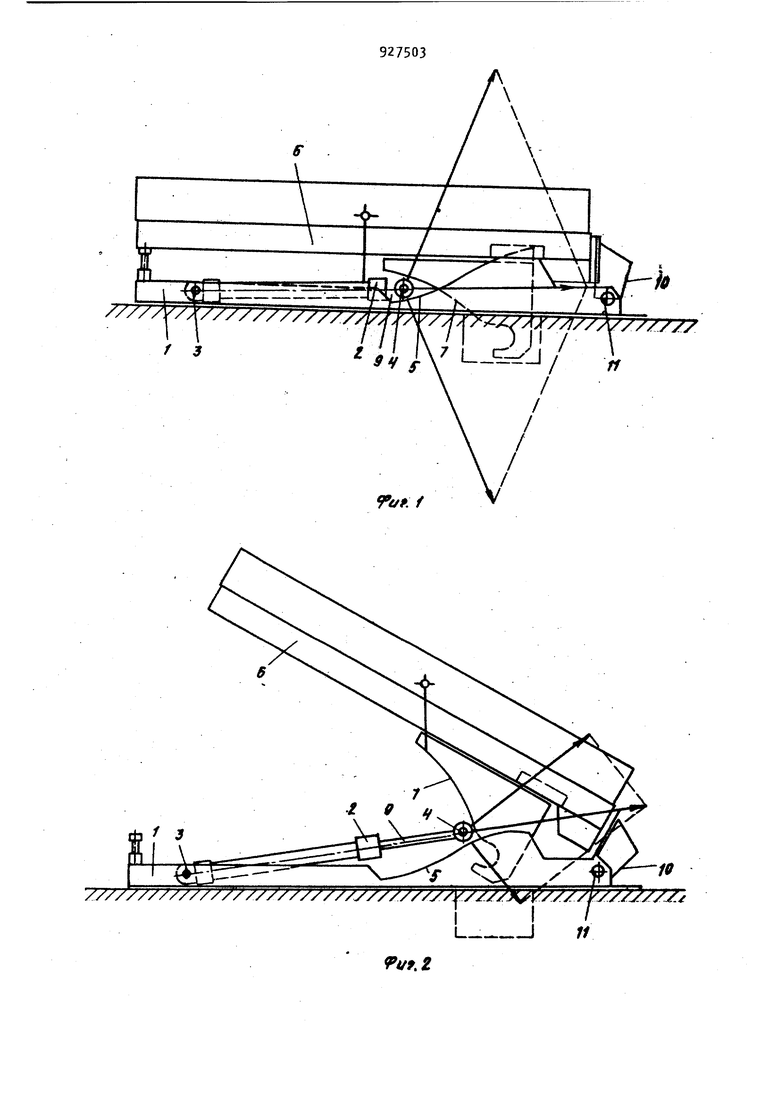
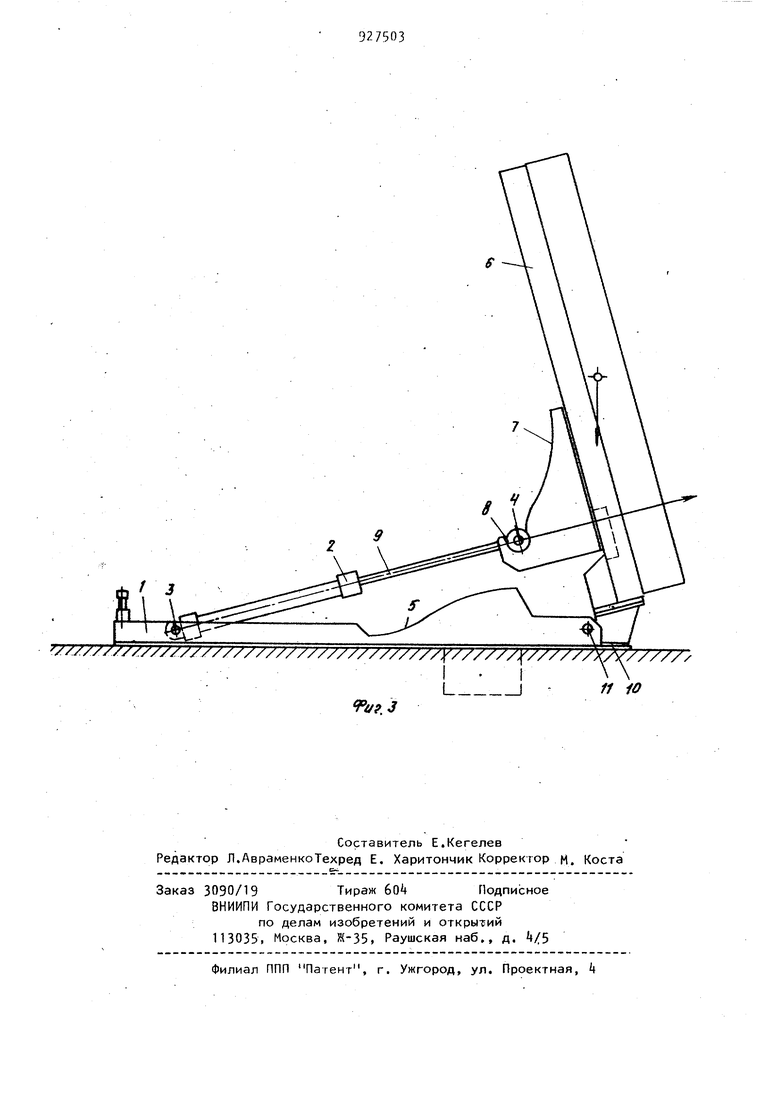
15 изобретения заключается в том, что к несущей раме с помощью пальца подвижно горизонтально крепитсИ гидравлический рабочий цилинд, у которого головная част.ь выполнена как подвиж10ная в себе самой роликовая головка. Лежащая в направлении подъема часть несущей рамы выполнена нижняя профильная деталь. 8 качестве сопря 39 женной детали к нижней профильной детали на нижней поверхности опрокидной формы расположена верхняя профильная деталь с кулачком, выполненным как контропора. В качестве предохранителя против опрокидывания опрокидной формы служа шарниры свободного касания,, которые ,с одной стороны, соединены болтами и приварены с торцевой стороны опрокидной формы, а, с другой стороны, приварены к подвижно соединенному с несущей рамой ролику и в конечном положении прилегающие к несущей раме. На рис.1 показан гидромеханически опрокидыватель в исходном положении вид сбоку; на рис.2 - то же, в повернутом на 3О положении; на рис.3 ТО же, в конечном положении (здесь при 75°), вид сбоку. На несущей раме 1 (рис.1} в горизонтально м положении подвижно с помощью пальца 3 крепится гидроцилинд 2, причем головная часть гидроцилинд ра 2 выполнена в виде подвижной в себе самой роликовой головки 4. Лежащая в направлении подъема часть несущей рамы 1 выполнена как нижняя профильная деталь 5. К нижней части опрокидной формы 6 крепится верхняя профильная часть 7, причем одна часть верхней профиль ной части 7 выполнена как контропора роликовой головки 8. Опрокидывание формы производится тем, что вследствие выдвижения поршневого штока 9 гидроцилиндра 2.сначала используются расклинивающие усилия, которые возникают при входе роликовой голов ., ки в параллели верхней и нижней профильных частей 5 и 7 и зьгаывают подъ ем опрокидной формы 6 так,как показано на рис.2. Эти расклинивающие усилия при дальнейшем подъеме опрокидной формы 6 уменьшаются, причем одновременно уменьшается и опрокидывающий момент. При дальнейшем подъеме опрокидной формы 6 опрокидывающий момент в положении, в котором центр тяжести масс достиг центра поворота, равен 0. На рис.3 прказана опрокидная форма в поднятом положении. Заклинивание опрокидной формы 6 вперед производится с помощью одного из известных шарниров свободного касания 10, который одной торцевой ctopoнoй присоединен болтами и приварен к опрокидной форме 6, а также сварен с одним роликом 11, который вращаясь опирается на несущую раму 1. Формула изобретения 1 . Гидромеханический опрокидыватель для подъема тяжелУх опрокидных форм с помощью известного лежащего под опрокидной формой гидроцилиндра и шарнира свободного касания, о т личающийся тем, что часть ,несущей рамы выполнена как нижняя профильная часть, над ней расположена прикрепленная к основанию опрокидной формы верхняя профильная часть с при.работанной контропорой роликовой головки, а подвижная в себе самой роликовая головка цилиндра расположена между профильными частями касаясь их. 2. Опрокидыватель по п,1, о т л ич а .ю щ и и с я тем, что шарнир свободного касания соединен болтами и сварен с одной боковой стороной опрокидной формы и одновременно сварен с роликом, который, вращаясь, опирается на несущую раму.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕДВИЖНОЙ БОКОВОЙ ОПРОКИДЫВАТЕЛЬ ШАХТНЫХВАГОНЕТОК | 1966 |
|
SU186936A1 |
| Транспортное устройство для слитков для прокатки, применение такого транспортного устройства и способ транспортировки слитков для прокатки | 2014 |
|
RU2640508C2 |
| СПОСОБ СОЕДИНЕНИЯ КОЛЕЙНОГО МОСТА С МЕХАНИЗМОМ УКЛАДКИ МОСТОУКЛАДЧИКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2063495C1 |
| Опрокидыватель вагонеток | 1958 |
|
SU116343A1 |
| ОПРОКИДЫВАЮЩЕЕ УСТРОЙСТВО ДЛЯ ОПОРОЖНЕНИЯ КОНТЕЙНЕРОВ ДЛЯ ШТУЧНЫХ ГРУЗОВ | 1997 |
|
RU2193999C2 |
| Устройство для загрузки изделий в тару | 1990 |
|
SU1724519A1 |
| Источник сейсмических колебаний | 1987 |
|
SU1492332A1 |
| ПЕРЕДВИЖНАЯ БУРТОУКЛАДОЧНАЯ МАШИНА | 1969 |
|
SU253657A1 |
| СПОСОБ ТРАНСПОРТИРОВКИ СЫПУЧЕГО МАТЕРИАЛА | 2000 |
|
RU2169686C1 |
| МАНИПУЛЯЦИОННОЕ КОНТРОЛЬНОЕ УСТРОЙСТВО | 2015 |
|
RU2607721C1 |