(54) ЭЛЕКТЮГИДРАВЛИЧЕСКАЯ СЛЕЛЯЦ АЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С ТРЕХКАСКАДНЫМ ЭЛЕКТРОГИДРОУСИЛИТЕЛЕМ | 2012 |
|
RU2505715C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ДРОССЕЛЬНОГО РЕГУЛИРОВАНИЯ С ДВУХКАСКАДНЫМ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ УСИЛИТЕЛЕМ МОЩНОСТИ | 2007 |
|
RU2361123C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2268400C1 |
| ДВУХКАСКАДНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ С ЭЛЕКТРИЧЕСКОЙ ОБРАТНОЙ СВЯЗЬЮ | 2007 |
|
RU2361119C2 |
| АВТОНОМНЫЙ ГИДРОПРИВОД-БЛОК ЭЛЕКТРОГИДРАВЛИЧЕСКИХ РУЛЕВЫХ МАШИН | 2003 |
|
RU2262625C2 |
| ТРЕХКАСКАДНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ | 2007 |
|
RU2346187C2 |
| Электрогидравлический следящий привод | 1980 |
|
SU941701A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2311567C1 |
| РЕЗЕРВИРОВАННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2000 |
|
RU2190129C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ КОНТРОЛИРУЕМОГО ПАРАМЕТРА ВЫХОДНОГО ЗВЕНА ГИДРОДВИГАТЕЛЯ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО СЛЕДЯЩЕГО ПРИВОДА | 2001 |
|
RU2206804C2 |
I
Изобретение относится к гидроавтоматике и может быть использовано в гидравлических следящих приводах различныхмашин.
Известна электрогидравлическая следящая ; система, содержащая гидродвигатель, последовательно соединенные операционный усилитель и двухкаскадный электрогидравлнческий усилитель с плоским поворотным золотником второго каскада, размещенным в обойме н связанным гидролиниями с полостями гндродвигателя, и датчик углового положения, ротор которого связан с осью золотника, соеданенный электрической цепью обратной связи со входом операционного усилителя 1,
Недостатком известной системы является возможность ухудшения динамических свойств нз-за резонансных явлений в рабочей полосе частот.
Целью изобретения является улучшение динамических свойств.
Указанная цель достигается тем, что система снабжена гидравлическим устройством обратной связи по динамическому перепаду давлений в полостях гидродвигателя, а обойма
золотника выполнена поворотной и снабжена рьяагом, кинематически связанным с выходным элементом гидромеханического устройства.
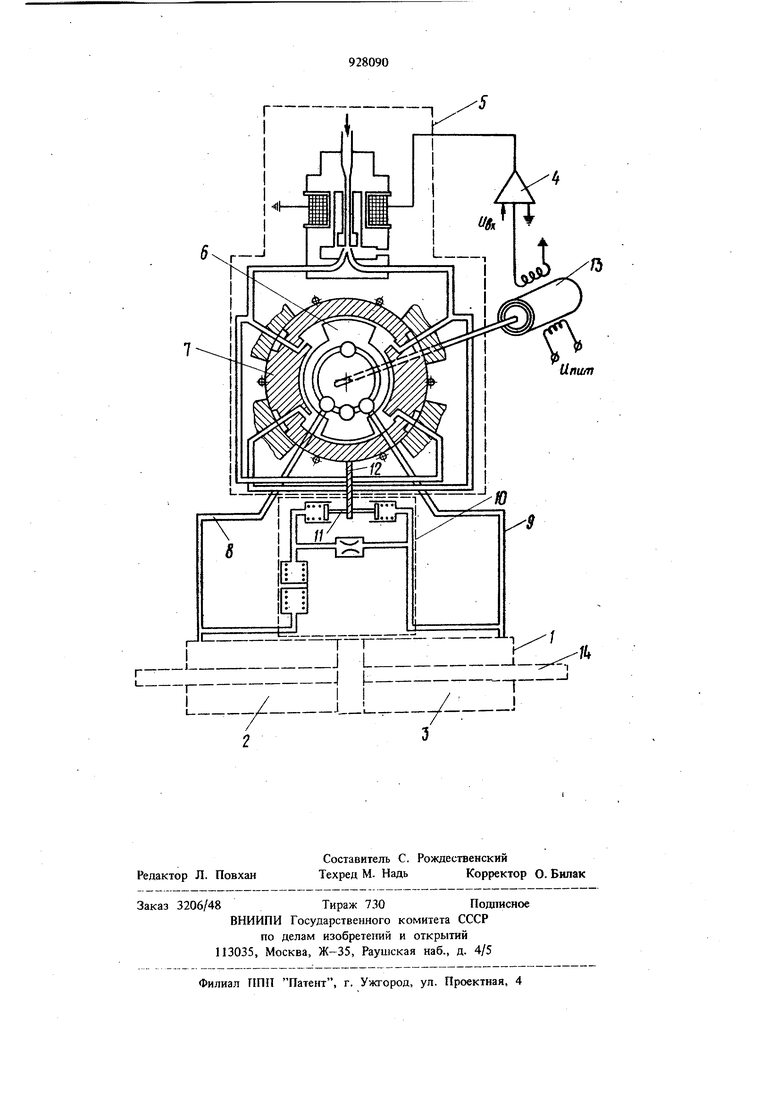
На чертеже изображена аяекгфогидравлическая следящая система.
Система содержит гидродвигатель (гидроцилиндр) 1 с полостями 2 и 3, операционный усилитель 4, двухкаскадный злектрогидравлический усилитель 5 с плоским поворот10ным золотником 6 второго каскада, размещенным в поворотной обойме 7 и связанным гидролиниями 8 и 9 с полостями 2 и 3 гидродвигателя 1, к которым подключено гидромеханическое устройство обратной связи
15 По перепаду давлений 10, выходной элемент И которого кинематуиески связан с рьпагом 12 обоймы 7. Датчик 13 углового положения золотника 6 соединен электрической цепью обратной связи со входом усилителя 4. Шток
20 14 гндроцилнндра 1 соединен с нагрузкой (на чертеже не показан).
Электрогвдравлическая слепящая система работает следующим образом.
392
При подаче : лектрического управляющего си1-нала на вход онерациошюго усилителя 4 появляется поток рабочей жидкости, управляющий положением золотника 6. Золотник 6 поворачивается и перераспределяет потоки рабочей жидкости, поступающие в гидроцилиндр J. Лри этом на выходе электрического датчика 13 появляется электрический сигиал, компенсирующий входной управляюпшй сигнал операционного усилителя 4. Поворотный золотник 6 поворачивается на угол, пропорциональный величине управляющего сигнала. , Если частота входного управляющего сигнала сун1ественпо отличается от резонансной, то сигнал обратной отрицательной связи по динамическому перепаду давлений в полостях 2 и 3 гидроцилиндра 1, вырабатываемый устройством обратной связи по динамическому перепаду давлегшй 10, очень мал и практически не оказывает влияния на работу системы. При работе на частотах, близким к резонансным, в полостях 2 и 3 гидроцилиндра 1 возникает большой перепад давления, вызывающий резкое увеличение амплитуды клебаний штока 14 гидроцилиндра 1. В этом случае устройство обратной связи по динамическому перепаду давлений 10 вырабатывает сигнал, пропорциональный величине перепада . давлений в полостях 2 и 3. Обойма- 7 поворачивается на угол, пропорциональный величи не сигнала устройства отрицательной обратной связи по динамическому перепаду давлений 10, Открытие дросселирующей щели на поворотом золотнике 6 уменьшается и уменшается перепад давлений в полостях 2 и 3
гидроцилиндра 1. Уменьшение амплитуды колебавши штока 14 гидроцилиндра 1 на резонансной частоте позволяет увеличить добротносп гидравлической следящей системы без уменьшения области его устойчивости.
Применение изобретения позволяет улучшить данамические свойства гидравлических следящих приводов.
Формула изобретения
Электрогидравлическая следящая система, содержащая гидродвигатель, последовательно соединенные операционный усилитель и дву каскадный электрогидравлический усилитель с плоским поворотным золотником второго каскада, размещенным в обойме и связанным гидролиннями с полостями гидродвигателя, и датчик углового положения, ротор которого связан с осью золотника, соединенный электрической цепью обратной связи с входом операционного усилителя, отличающаяся тем, что, с целью улучшения динамических свойств, система снабжена гидромеханическим устройством обратной связи по динамическому перепаду давлений в полостях гидродвигателя, а обойма золотника вьшолнена поворотной и снабжена рычагом, кинематически связанным с выходным элементом гидромеханического устройства обратной связи.
, Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 618580 кл. F 15 В 9/07, 1977.
.J (.
-Л
Т
