I
Изобретение относится к электротехнике и может быть использовано в системах синхронизации частоты вращения электродвигателей постоянного тока.
Известны синхронизированные электроприводы постоянного тока, содержащие электродвигатель, подключенный к силовому блоку, датчик частоты вращения и подключенный к силовому блоку щиротно-импульсный регулятор с частотно-фазовым дискриминатором 1.
Недостатком этих электроприводов является небольшой диапазон регулирования.
Наиболее близким к изобретению по технической сущности является электропривод постоянного тока, содержащий электродвигатель, подключенный к силовому коммутатору с модулирующим и реверсирующим входами и связанный с датчиком частоты вращения, подключенным к одному входу импульсного частотно-фазового дискриминатора, другой вход которого соединен с источником задающей частоты, а выход подключен к фильтру, выход которого связан с пороговым устройством 2. Такая система
работает на принципе фазовой автоподстройки частоты вращения. Воздействие на двигатель осуществляется путем щиротно-импульсной модуляции питания через силовой коммутатор и регулированием таким образом вращающего момента.
Вращающий момент при заданном направлении вращения может иметь только постоянный знак, что ограничивает возможности регулирования. Например, при резких сбросах нагрузки стабилизация частоты вращения осуществляется только за счет уменьщения вращающего момента (без изменения его знака), что оказывается не всегда достаточным для компенсации возмущения и приводит к срыву синхронизации. Особенно это проявляется на низких частотах вращения, что ограничивает диапазон частотного управления. Кроме того, недопустима знакопеременная нагрузка, так, как электропривод не может создавать вращающий момент, противоположный направ2Q лению вращения. Это уменьщает функциональные возможности.
Целью изобретения является расщирения диапазона частотного управления и расширение функциональных возможностей за
счет обеспечения регулирования при знакопеременной нагрузке привода.
Цель достигается тем, что в известный электропривод постоянного тока введены инвертор с дополнительным пороговым устройством на выходе, логическая схема ИЛИ и триггер с раздельными входами, при этом вход инвертора соединен с выходом фильтра, выходы пороговых устройств соединены со входами триггера и схемы ИЛИ, выход которой подключен к модулирующему входу коммутатора, к реверсирующему входу которого подключен выход триггера.
Электропривод может дополнительно содержать включенный между выходами датчика частоты и источника задающей частоты и входами дискриминатора переключатель каналов, логическую схему равнозначности, включенную между выходом триггера и реверсирующим входом силового коммутатора, и задатчик напрявления вращения, к выходу которого подключены один из входов схемы равнозначности и управляющий вход переключателя каналов.
На фиг. 1 представлена блок-схема электропривода, на фиг. 2 - графики, поясняющие его работу.
Электропривод постоянного тока содержит электродвигатель 1 (фиг. 1), подключенный к нему силовой коммутатор 2, связанный с валом двигателя датчик 3 частоты вращения, импульсный частотно-фазовый дискриминатор 4, переключатель 5 каналов, через который входы дискриминатора связаны с датчиком частоты вращения и с источником 6 задающей частоты, подключенный к выходу дискриминатора фильтр 7; подключенные к выходу фильтра первое пороговое устройство 8 и инвертор 9; подключенное к выходу инвертора 9 второе пороговое- устройство 10; подключенные к выходам пороговых устройств, триггер 11 с раздельными входами и логическую схему ИЛИ 12, выход которой подключен к модулирующему входу силового коммутатора; логическую схему разнозначности 13, один из входов которой подключен к выходу триггера, а выход подключен к реверсирующему входу силового коммутатора; задатчик 14 направления вращения, выход которого подключен ко второму входу логической схемы равнозначности 13 и управляющему входу переключателя 5 каналов.
Принцип работы электропривода основан на фазовой автоподстройке (ФАП) частоты вращения.
Частота выходного сигнала датчика 3 определяется зависимостью ,±рррр, (1) где f ,j опорная частота; бр -частота вращения; |э - коэффициент.
Знак определяется направлениями вращения.
Отсюда следует: Pi-Po ()
где Vj - фаза выходного сигнала датчика;
ft, - фаза опорного сигнала. Такой сигнал обеспечивает высокую частоту поступления информации об угловом положении и частоте вращения ротора в неограниченном диапазоне частоты вращения, в том числе и при .
Сигналы от датчика 3 частоты вращения и источника 6 задающей частоты через переключатель 5 каналов поступают на входы дискриминатора 4.
В режиме фазовой автоподстройки автоматически поддерживается равенство входных часот дискриминатора, т.е.
() отсюда r p tiicio.
Импульсный частотно-фазовый дискриминатор 4 имеет логический выход. В режиме часотного сравнения сигналов характеристика дискриминатора релейная: при f4,,i на выходе «1
при на выходе «О,(4)
где f -частота сигнала на первом входе
дискриминатора, V частота сигнала на втором входе
дискриминатора.
В режиме фазового сравнения выходной сигнал дискриминатора представляет собой последовательности импульсов, COOTESCTCTвующих логической единице с частотой f4-i и коэффициентом заполнения KjMjnponopJJ циональным разности фаз сравниваемых сигналов; „ Oft,jV
(5)
2Г
Rjl,
где f 4,1 - фаза сигнала на первом входе дискриминатора,
5%,1-фаза сигнала на втором входе дискриминатора.
Для осуществления фазовой автоподстройки частоты вращения необходимо, чтобы разность фаз входных сигналов дискриминатора уменьшалась при превышении частотой
вращения заданной величины и возрастала при частоте вращения меньще заданной. Для обеспечения этих условий при частотной зависимости (1) выходного сигнала датчика от направления вращения необходимо при ре5 верее двигателя менять местами входные сигналы дискриминатора. Это производится с помощью переключателя 5.
Импульсный выходной сигнал дискриминатора поступает на фильтр 7, основным элементом которого является интегрирующее
0 RC-звено. Поэтому выходной сигнал фильтра имеет пилообразную форму с постоянной составляющей, пропорциональной величине К, ц на его входе в соответствии с выражением (2). Выходной сигнал фильтра 7 поступает на инвертор 9. Прямой и инвертированный сигналы фильтра поступают на пороговые устройства 8 и 10. В результате воздействия пилообразного сигнала на пороговое устройство на выходе его формируются прямоугольные импульсы, коэффициент заполнения которых (Kj и ) зависит от постоянной составляющей пилообразного входного сигнала и, таким образом, от , в конечТюм счете, от разности фаз входных сигналов дискриминатора (фиг. 2). Статические характеристики, определяющие зависимость выходных сигналов пороговых устройЬтв от разности фаз сигналов на входе дискриминатора, представлены на фиг. 3. Благодаря наличию инвертора 9 эти характеристики имеют участки с противоположными наклонами, а пороги устройств 8 и 10 настраиваются, например, так, что наклонные участки имеют на фазовой оси (оси абсцисс) оощую точку . В этом случае при фиксированном положении рабочей точки на фазовой оси срабатывает только одно из двух пороговых устройств.
Выходные сигналы пороговых устройств 8 (фиг. 1) и 10 поступают на логическую схему ИЛИ 12, коэффициент Kj, заполнения выходного сигнала которой имеет зависимость, представленную на фиг. 3, определяющую также сигнал на модулирующем входе силового коммутатора 2 (фиг. 1).
Среднее напряжение питания двигателя Ьх) определяется зависимостью
(/1)Кз«-С/ 1,(6)
где Кj|ii-коэффициент заполнения выходного сигнала схемы ИЛИ 12; i/n -напряжение питания силового коммутатора 2.
Выходные сигналы пороговых устройств 8 и 10 поступают также на раздельные входы триггера 11 и определяют его состояние. Так, при приходе на триггер импульсов с порогового устройства 8 триггер переключается в состояние «1 и его выходной сигнал включает канал силового коммутатора, обеспечивающий положительный вращательный момент М для прямого направления вращения (фиг. 3). Модулирующий канал работает в этом случае на правом наклонном участке характеристики К,о.( При уменьшении разности фаз меньще л рабочая точка смещается на левый налонный участок. В этом случае появляются импульсы на выходе порогового устройства 10 (фиг. 1), переключающие триггер в состояние 0. Его выходной сигнал включает канал силового коммутатора, обеспечивающий отрицательный вращающий момент, который вызывает J эффективное торможение.
Возможность изменения в режиме фазовой автоподстройки не только величины, но и знака вращающего момента М (лЧ), обеспечивает высокую устойчивость регулирования на всех частотах вращения, включая 0 низкие, вплоть до нуля, что расщиряет диапазон частотного управления. Кроме того, обеспечивается возможность устойчивого регулирования при знакопеременном активном моменте нагрузки во всем диапазоне частот .
При величине управляющей частоты f 6 fo частота вращения в соответствии с выражением (1) равна нулю. В этом случае при отсутствии момента нагрузки на валу двигателя рабочая точка занимает нейтральное положение (точка Jt) на характеристике М (А((. При этом на выходах пороговых устройств 8 и 10 импульсы отсутствуют и вращающий момент двигателя равен нулю. Потребляемый при этом двигателем ток равен нулю. Если приложить момент нагрузки, i вал двигателя повернется на некоторый угол, рабочая точка сместится от нейтрали (зт и появится электромеханический момент, препятствующий дальнейщему угловому повороту вала.
Электропривод работает в стопорном режиме, как «Электромеханическая пружина.
Таким образом, электропривод может работать при знакопеременной нагрузке в максимально возможном диапазоне часот вращения: от О до максимума, определяемого естественной характеристикой электродвигателя.
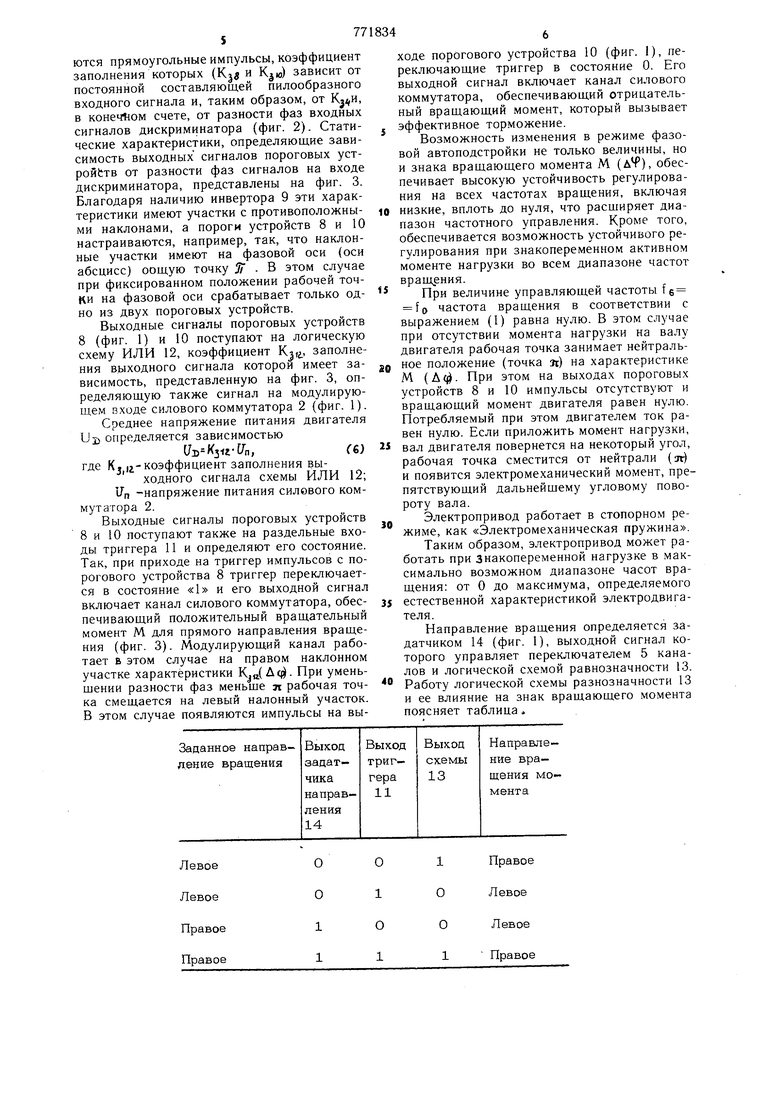
Направление вращения определяется задатчиком 14 (фиг. 1), выходной сигнал которого управляет переключателем 5 каналов и логической схемой равнозначности 13. Работу логической схемы разнозначности 13 и ее влияние на знак вращающего момента поясняет таблица
При этом выходной сигнал логической схемы равнозначности принимает значение «1 только при равнозначных сигналах на входах.
Формула изобретения
. Электропривод постоянного тока, содержащий электродвигатель, подключенный к силовому коммутатору с модулирующим и реверсирующим входами и связанный с датчиком частоты вращения, подключенным к одному входу импульсного частотно-фазового дискриминатора, другой вход которого соединен с источником задающей частоты, а выход подключен к фильтру, выход которого связан с пороговым устройством, отличающийся тем, что, с целью расщирения диапазона частотного управления и расщирения функциональных возможностей за счет обеспечения регулирования при знакопеременной нагрузке, в него введены инвертор с дополнительным пороговым устройством на выходе, логическая схема ИЛИ и триггер с раздельными входами, при этом вход инвертора соединен с выходом фильтра, выходы пороговых устройств соединены со входами триггера и логической схемы ИЛИ, выход которой подключен к модулирующему входу силового коммутатора, к реверсирующему входу которого подключен выход триггера.
2. Электропривод по п. 1, отличающийся тем, что в него дополнительно введены включенный между выходами датчика частоты
вращения и источника задающей частоты и входами импульсного частотно-фазового дискриминатора переключатель каналов, логическая схема равнозначности, включенная между выходом триггера и реверсирующим входом силового коммутатора, и задатчик
направления вращения, к выходу которого подключены один из входов логической схемы равнозначности и управляющий вход переключателя каналов.
Источники информации, принятые во внимание при экспертизе 1. Смирнова Б. А. Синхронизация скорости вращения микроэлектродвигателей постоянного тока от источника задающей частоты с помощью частотно0 фазового дискриминатора. В кн.: «Электрические двигатели малой мощности, Киев, «Наукова думка, 1969.
2.. Ларионова В. В. и Федорова В. В. Способ коррекции синхронизированных бесконтактных двигателей постоянного тока, - Сб. «Электронная техника в автоматике под ред. Ю. И. Квнева, вып. 9, М., «Сов« радио, 1977, с. 231, рис. 1.

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1980 |
|
SU928575A1 |
| Электропривод постоянного тока | 1981 |
|
SU995247A1 |
| Электропривод постоянного тока | 1985 |
|
SU1272452A1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2310971C1 |
| Позиционный электропривод | 1984 |
|
SU1270859A1 |
| Электропривод постоянного тока | 1987 |
|
SU1411910A1 |
| ЭЛЕКТРОПРИВОД | 1999 |
|
RU2161365C1 |
| ЭЛЕКТРОПРИВОД | 2005 |
|
RU2302073C1 |
| ЭЛЕКТРОПРИВОД | 2003 |
|
RU2260897C2 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |

