г:
л
(/)

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1988 |
|
SU1564707A1 |
| Электропривод постоянного тока | 1991 |
|
SU1786630A1 |
| Следящий электропривод с компенсацией люфта | 1985 |
|
SU1273875A1 |
| Электропривод постоянного тока | 1991 |
|
SU1775833A1 |
| Электропривод постоянного тока | 1987 |
|
SU1411910A1 |
| Электропривод постоянного тока | 1980 |
|
SU928575A1 |
| Цифровая система регулирования частоты вращения двигателя постоянного тока | 1986 |
|
SU1386959A1 |
| Преобразователь кода в скорость вращения вала | 1988 |
|
SU1599991A1 |
| Устройство сравнения частот и фаз | 1983 |
|
SU1171971A1 |
| Синхронизируемый вентильный электродвигатель | 1985 |
|
SU1317581A1 |
Изобретение относится к электротехнике, в частности к управляемым электродриводам, предназначенным для точного регулирования и стабилизащ1И угловой скорости механизмов, работающих в условиях изменяющихся внешних воздействий. Целью изобретения является увеличение точности стабилизации частоты и фазы вращения электродвигателя при линейно изменяющихся внешних воздействиях и параметрах электропривода. Электропривод содер-
4 ОС} Ji СП
СО
к
жит электродвигатель 1 с частотным датчиком 2 скорости вращения. В режиме сравнения фаз чередование импуль- со частот задатчика 3 f, и обратной fg приводит к появлению на выходах триггеров 9 или 11 фазового дискрикшнатора 4 широтно-импульсного сигнала с относительной длительностью, пропорциональной фазовому рас ласованию частот
, В режиме авнения фазовый дискриминаf, и
со ср
то 4 выдает на соответствующих выхо- постоянные сигналы в зависимости
да
от соотношения частот f, и fg. В
vqгaнoвившeмcя режиме при постоянном
.1
I Изобретение относится к электро- т хнике, а именно к управляемым 3Jектроприводам, предназначенным для точного регулирования и стабили- згции угловой скорости механизмов, работающих в условиях изменяющихся BI-ешних воздействий.Цель изобретения - увеличение точнйсти стабилизации частоты и фазы вращения электродвигателя при линей- нф изменяющихся внешних воздействиях И параметрах электропривода.
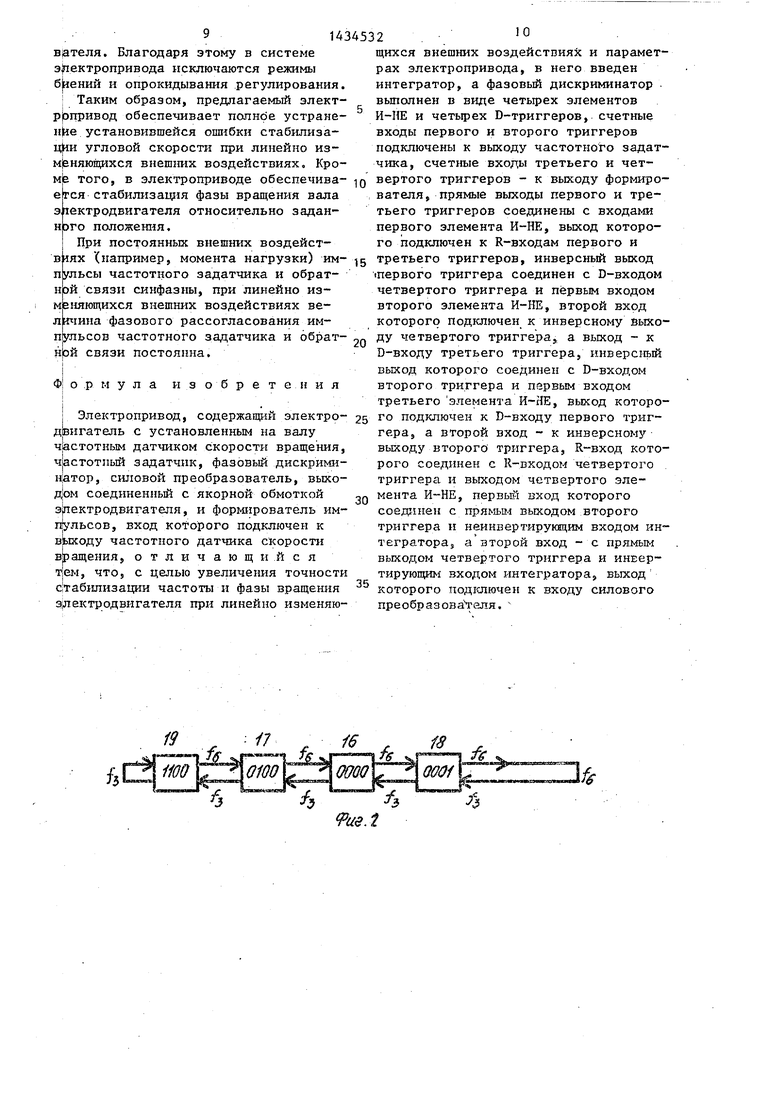
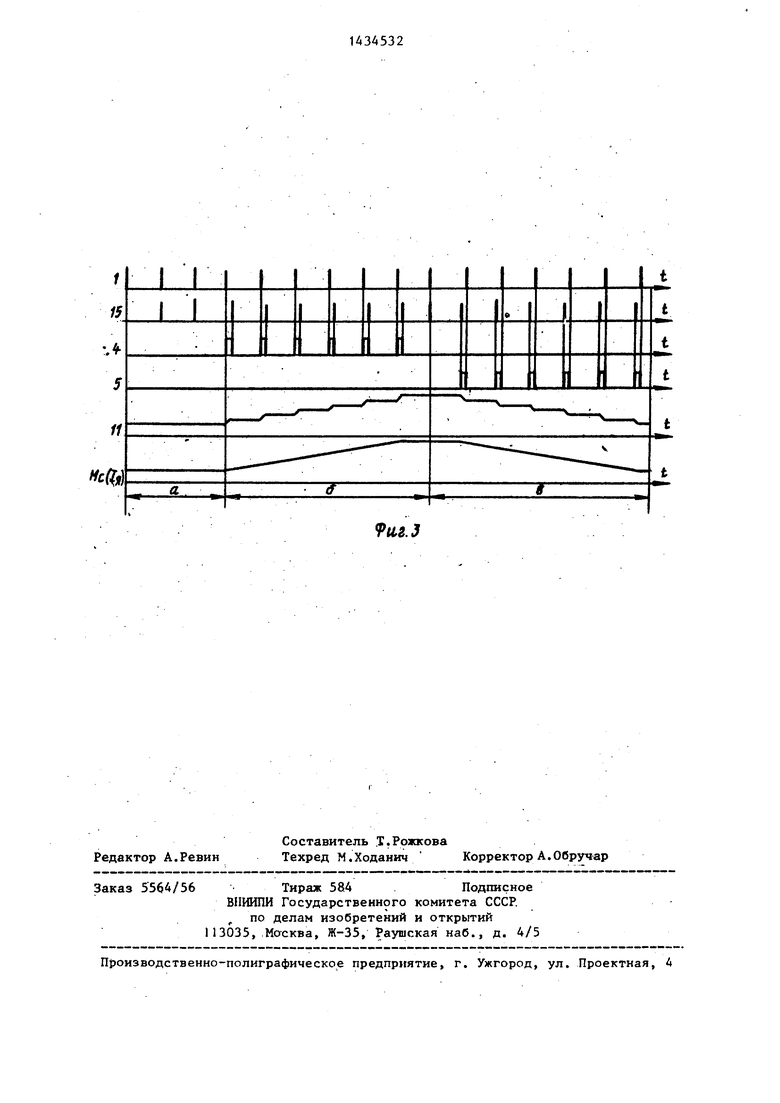
I На фиг. 1 изображена блок-схема предлагаемого электропривода} на фиг. 2 - направленный граф работы фазового дискриминатора} на фиг. 3 - временные диаграммы работы элементов э гектропривода.
Электропривод содержит электродвигатель 1 с установленным на ei;o валу частотном датчиком 2 скорости вращения, частотный задатчик 3, фазовый д||;скриминатор 4 и силовой преобразователь 5. Силовой преобразователь 5 выходом соединен с якорной обмоткой электродвигателя 1. Формирователь 6 импульсов входом подключен к выходу частотного датчика 2 скорости вращения. Кроме того,электропривод содержит интегратор 7, а фазовый дискриминатор 4 выполнен в виде четьгрех D-триггерЬв 8-11 и четырех элементов И-НЕ 12-15. Счетные входы первого и второго D-триггеров 8 и 9 подключены
моменте нагрузки на выходе .интегратора 7 присутствует постоянное напряжение, к-рое усиливается силовым преобразователем 5 и подается на электродвигатель 1. При линейно изменяющихся внешних воздействиях величина фазового рассогласования постоянна. Использование фазового дискриминатора 4 допускает одновременный приход импульсов частот задатчика и обратной связи и исключает схему разделения. Интегратор позволяет использовать силовой преобразователь с аналоговым входом управления в электродвигатель любого типа. 3 ил.
0
5
0
5
0
35
к выходу частотного задатчика 3. Счетные входы третьего и четвертого D-триггеров 10 и 11 соединены с выходом формирователя 6 импульсов. Прямые вьпсоды первого и третьего D-триггеров 8 и 10 соединены со входами первого элементу И-НЕ 12, выход которого подключен к Ктвходам первого и третьего D-триггеров 8 и 10. Инверсный выход первого D-триггера 8 соединен с D-входом четвертого D-триггеря 11 и первым входом второго элемента 13. ВтЪрой вход втор.ого элемента И-НЕ 13 подключен к инверсному выходу четвертого D-триггер.а 11, а выход - к D-входу третьего D-триггера 10. Ин- версньй выход третьего D-триггера 10 соединен с D-ВХОДОМ второго D-триггера 9 и первым входом третье- го элемента И-НЕ 13, выходом подключенным к D-входу первого D-триггера 8. Второй вход третьего элемента ИгНЕ 13 соединен с инверсным выходом второго D-триггера 9, R-вход которого подключен к R-входу четвертого D-триггера 11 и выходу четвертого элемента И-НЕ 15. Первый вход четвертого элемента И-НЕ 15 соединен с прямым выходом второго D-триггера 9 и. . неинвертирующим входом интегратора 7, а второй вход - с прямым выходом чет-: вертого D-триггера 11 и инвертирующим входом интегратора . Выход интегратора 7 подключен ко входу силового преобразователя 5.
314
Электропривод работает следующим, образом.
Пусть в ИСХОДНОМ состоянии на прямых выходах D-триггеров 8-11 фазового дискриминатора 4 присутствуют потенциалы логического нуля. Эти состояния принимают за нулевые, а состояния, когда на прямых выходах этих триггеров присутствуют потенциалы логической единицы, принимают за единичные.
На направленном графе (фиг,2) эти ;состояния обозначены через О и 1 и показаны в прямоугольниках слева на- право для D-триггеров 8-11, а стрелками обозначены переходы фазового дискрими 1атора из одного состояния в другое под действием отдельных им
пупьсов частот f, или f
Исходное состояние фазового диск- Риминатора, когда на прямых вькодах D-триггеров 8-11 присутствуют сигналы логического нуля, обозначено цифрой 16. В этом состоянии на D-входах П-триггеров 9 и 11 присутствуют потенциалы логической единицы (1), подаваемые с инверсных выходов D-тригеров 10 и 8 . соответственно. На р-входах D-триггеров 8 и 10 присутствуют потенциалы логического нуля (О) , подаваем1з е с выходов элементо И-НЕ 13 и 14, так как на их входах присутствуют потенциалы 1 с инверсных выходов D-триггеров 9 и 10 и -8 и 11.
С приходом импульса частоты f частотного задатчика 3 в состояние 1 переключается D-триггер 9. При этом D-триггер 8 не изменяет своего состояния, так как в момент прихода импульса f, на его D-входе присутствует сигнал О с выхода элемента И-ПЕ 14. На направленном графе фиг.2 это соответствует переходу фазового диcкpимJiнaтopa 4 из состояния 16 в состояние 17. Приход затем импульса частоты fg с выхода формирователя,6 приводит к переключению D-триггера 11 в состояние 1 и появлению на выходе элемента И-НЕ 15 сигнала О, который возвращает D-триггеры 9 и 11 в исходное состояние (переход фазового дискриминатора 4 в состояние 16) При переходе фазового дискриминатора 4 из состояния 17 в состояние 16 на прямом выходе D-триггера .11 появляется узкий импульс, длительность которого определяется величиной задерж-
л
0
5
ки на переключение элемента И-НЕ 15 и D-триггера 9.
Процесс перехода фазового дискриминатора 4 из состояния 16 в состояние 18 и обратно происходит аналогично вьшеЪписанному. При переходе из состояния 16 в состояние 18 импульс частоты f переключает в состояние 1 D-триггер 11 ,aD-тpиггep 10 своего состояния не изменяет, так как на D-входе в момент прихода импульса частоты fg присутствует сигнал О с выхода элемента И-НЕ 13. При переходе дискриминатора из состояния 18 в состояние 16 импульс частоты f. переключает в состояние 1 D-триггер 9, в результате чего на выходе элемента И-НЕ 15 появляется сигнал О, который воз- вращает D-триггеры 9 и 11 в исходное состояние 16.
Таким образом, в режиме сравнения
фаз при частот f
3
и .
чередование импульсов 3 и обрат- , j-g задатчика ной связи приводит к появлению на выходах D-триггеров 9 или
импульсного сигнала
11 широтно- с относительной
длительностью импульсов у,, или А , , пропорциональной фазовому рассогласованию импульсов частот f и fg, причем в зависимости от знака фазового рассогласования частот f и fg широт- но-импульсньй сигнал появляется на выходе D-триггера 9 или на выходе D-трнггера 11,,
При появлении широтно-ийпульсного сигнала на выходе D-триггера 9 на выходе D-триггера 11 присутствует сигнал О, так как узкие импульсы из-за малой их длительности не изменяют уровень напряжения логического нуля на выходе D-триггера 11. И, на - оборот, когда на выходе D-триггера : присутствует глиротно-импульсньй сигнал,, на выходе D-триггера 9 устанав- ливается сигнал О.
В режиме сравнения частот (напри5
0
f6
приход подряд двух иммер, f,
пульсов частоты переводит, фазовый дискриминатор 4 из состояния 16 в состояние 19. При этом первый импульс частоты fJ переключает в состояние 1 D-триггер 9 (переход из состояния 16 в состояние 17 на фиг.2) на выходе элемента И-НЕ 14 появляется сигнал 1, который подается на D-вход D-триггера 8. Второй импульс частоты fJ переключает в состояние 1 D-триггер 8 (переход из состоя 14
иия 17 в состояние 19 на фиг. 2). Приход импульса частоты fg в промежутке времени между двуг-ш импульсами частоты fj приводит к переключению в состояние 1 D-триггера 10, в ре- зультате чего на выходе элемента И-НЕ 12 появляется сигнал О, пере- лючающий D-триггеры 8 и 10 в состоя Еше О (переход фазного дискриминатора 4 из состояния 19 в состояние 17 на фиг. 2). Следующий за импульсом частоты f импульс частоты f (так как f f) переключает Р триггер 8 в состояние 1 (переход из состояния 17 в состояние 19 на Ьиг. 2).
Таким образом, в режиме сравнения lacTOT при f 6 Ф 13овь Й дискрими- атор 4 вьщает постоянные сигналы i 1 на прямом выходе D-триггера 9 и i O па прямом выходе В триггера 11, При fg f- процессы фазового диск- :)иш1натора аналогичны, но .он выдает :1остоянные сигналы 1 на прямом выводе D-триггера 11 и О на прямом зыходе D-триггера 9.
В установившемся режиме работы электропривода фазовый дискриминатор работает в режиме сравнения фаз
f Г- -
f, fj
g/ и при постоянном моменте нагрузки (участок а на фиг. 3) на вы- |ходе интегратора 7 присутствует посто- jtiHHoe напряжение, которое усиливает- ря силовым преобразователем 5 по Мощности и подается на электродвига™ Ьель 1. Величина напряжения, подаваемого с выхода силового преобразовате- |1я 5 на электродвигатель 1, определяется уровнем угловой скорости и моментом сопротивления на его валу:
5 m.x
(
JL
.
м
.)
MK
;
(1)
где Uj - напряжение
го преобразователя 5, Поскольку силовой преобразователь усиливает выходное напряжение интегратора, то в замкнутой системе с учеимеем
том того, что Up
и
s
и, K,j(u; -и,) dt
и,(„,-ь KT/U, - U,).t ,
где и 7
К
что, возможно, согласно алгоритма работы фазового дискриминатора, при , 0j т.е. при нулевом на выходе силово- g фазовом рассогласовании частот f, и
f на входах фазового дискриминатора. Постоянное напряжение на вько- де интегратора в замкнутой системе электропривода устанавливается авто50 матически в момент выхода привода в установившийся режим.
В реальных условиях величина,фазового рассогласования импульсов частот fg и fg не равна нулю и определя55 ется величиной тока утечки интегратора, которая у современных усилителей достаточно мала и составляет d.
10 микроампер.
Ur-Krs,
(2)
- напряже1ше на выходе
интегратора 7 J и К - коэффициенты передачи
интегратора 7 и силово
5
И и;
0
и
в
го преобразователя 5 соответственно/ напряжегше на инвертирующем и неинвертирующем входах интегратора 7 соответственно/ постоянная интегрирования - напряжение на выходе интегратора, определяемое начальными условиями интегрирования; t - время. В свою очередь, напряжения U и
7(0)
на входах интегратора 7 связаны с величиной относительной длительности импульсов на выходах D-триггеров 9 и t1 фазового дискриминатора 4 соотношениями
и
и
и;.
1Uи,
,(3) (4)
5
0
5
0
где у,
и и
и и;.
- относительная длительность импульсов и уровень напряжения логической единицы на выходе D-триггера 9j
- относительная длительность импульсов и уровень напряжения логической единицы на выходе D- rpHrrepa 11 . С учетом (3) и (4) выражение (2) принимает вид
UT V .Uи)t. (5) Из выражения (5) следует, что напряжение на выходе интегратора мoжet быть постоянным при условии
j,u; - „ui, 0
(6)
Таким образом, при постоянном моменте нагрузки требуемое, согласно (1), напряжение на двигателе обеспечивается при величине фазового-рассогласования импульсов частот f и f , близкой к нулю. Уровень выходного напряжения интегратора в этом режиме определяется уровнем угловой скорости двигателя и моментом сопротивления на его валу.
При изменении момента сопротивления по линейному закону (участок б на фиг.З),
MC MCO +
М t.
(7)
где М - постоянная составляющая
момента сопротивления; М - темп роста момента сопротивления,
«
постоянства поддержания угловой скорости необходимо изменять напряжение на выходе силового преобразователя 5 по закону
+
(8)
Реализаций закона (8) возможна лишь при соответствующем изменении напряжения интегратора
UT - Vl + K,y, и t, (9)
которое получается согласно (5) при .
В этом случае фазовый дискрш-О1на- тор работает в режиме сравнения фаз, переключаясь (фиг.2) из состояния 16 в состояние 17 и обратно.
Из выражения (9) следует, что при линейном изменении момента сопротив- леьшя на валу электродвигателя по закону (7) на выходе D-триггера 9 фазового дискриминатора 4 появляется широтно-импульсный сигнал с постоянной относительной длительностью импульсов у., пропорциональной темпу роста момента сопротивления м .
На выходе D-триггера 11 фазового дискриминатора 4 при этом присутству- ет сигнал логического нуля.
В то же время частоты fз и fg задатчика 3 и формирователя 6 остаются постоянными, что свидетельствует о том, что изменение момента сопротивления по закону (7) не пр.иводит к появлению о1ш-1бки стабилизации уровня угловой скорости электродвигателя 1.
Аналогично можно показать работу электропривода при изменении момента сопротивления на валу двигателя по
закону
MC MC,
- М t.
(10)
В этом случае необходимо для поддержания постоянства угловой скорости изменение напряже дая силового преобразователя 5 по закону
и и ( + - и - t СП) иг-и„„„ о TLt - max w - . ч f I /
- max -Q
M.
M.
5
5
0
5
0
обеспечивается соответствующим изменением выходного напряжения интегратора 7, согласно (5), при V О по
закону
и, и
К,;
0
7 -НС) n,,U,t
(12)
5
0
5
Фазовьм .дискрШ Я-гаатор 4 при этом работает в реусиме сравнения фаз, переключаясь (фнг.2) из состояния 16 в состояние 18 и обратно.
В этом режиме (участок в на фиг.З) в замкнутой системе электропривода на выходе D-триггера 11 разового дискриминатора 4 автоматически устанавливается широтно-импульсный сигнал с постоянной относительной длительностью импульсов У,, S пропорциональной темпу спада момента сопро- тивлешш. Частоты f и f задатчика 3, формирователя б в этом режиме также остаются постоянными, что свидетельствует об отсз тствии ошибки стабилизации скорости электродвигателя. Ток якоря двигателя (Ijj) (фиг.З), несмотря на ступенчатый характер выходного напряжения интегратора, повторяет форму кривой момента сопротивления М(.,, так как частота переключений фазового дискриминатора обычно составляет 1-2 кГц и превышает на, один-два порядка максимальную частоту полосы пропускания системы, которая определяется в основном инерционностью двигателя.
В переходных режимах пуска и торможения электродвигателя фазовьй диск- ри шнатор работает в режиме сравнения частот. При этом он вьщает постоянные лoг iчecкиe сигналы: 1 м О соответственно на неинвертирующий и инвертирующий входы интегратора при пуске электродвигателя; О и 1 - при торможении электродвигателя, изменяя в необходимую сторону напряжение интегратора и силового преобразовзтеля. Благодаря этому в системе э|пектропривода исключаются режимы биений и опрокидывания регулирования. : Таким образом, предлагаемый элект- р привод обеспечивает полное устранение установившейся ошибки стабилиза- 1ФИ угловой скорости при линейно из- м|еняющихся внеш1шх воздействиях. Кро1434532 . °
щихся внешних воздействиях и параметрах электропривода, в него введен интегратор, а фазовый дискриминатор вьтолнен в виде четьфех элементов И-НЕ и четырех В триггеров, счетные входы первого и второго триггеров подключены к выходу частотного задат- чика, счетные входы третьего и четм|е того, в электроприводе обеспечива- д вертого триггеров - к выходу формироегея стабилизация фазы вращения вала э1ектродвигателя относительно заданного положения, I При постоянных внешних воздействателя, прямые выходы первого и третьего триггеров соединены с входами первого элемента И-НЕ, выход которого подключен к R-входам первого и
ВИЯХ (например, момента нагрузки) им- gтретьего триггеров, инверсный выход
пульсы частотного задатчика и обрат-«первого триггера соединен с D-входом
ной связи синфазны, при линейно из-четвертого триггера и первым входом
меняющихся внешних воздействиях ве-второго элемента И-НЕ, второй вход
лршна фазового рассогласования им-которого подключен к инверсному выхоп ьсов частотного задатчика и обрат- jgДУ четвертого триггера а выход - к
н|ой связи постоянна.D-входу третьего триггера, инверсньгй
Iвыход которого соединен с D-входом
Ф| о р м у л а изобретениявторого триггера и первым входом
Iтретьего элемента И-НЕ, выход которо- Электропривод, содержащий электро- 25 fo подключен к Б входу первого тригдбвигатель с установленным на валу частотным датчиком с:корости вращения, ч|астотпый задатчик, фазовый дискрими- HjaTop, силовой преобразователь, выхо- д1ом соединенньй с якорной обмоткой э|пектродвигателя, и формирователь им- п ульсов, вход которого подключен к частотного датчика скорости в|ращения, отличающийся т|ем, что, с целью увеличения точности с;табилизации частоты и фазы вращения Э|лектродвигателя при линейно изменяю30
35
гера, а второй вход - к инверсному выходу второго триггера, R-вход которого соединен с R-вкодом четвертого триггера и выходом четвертого элемента И-НЕ, первьш вход которого соединен с прямым выходом второго триггера и неинвертирукщим входом интегратора, а второй вход - с прямьш выходом четвертого триггера и инвертирующим входом интегратора, выход которого подютючен к входу силового преобразователя.
ue.i
вателя, прямые выходы первого и третьего триггеров соединены с входами первого элемента И-НЕ, выход которого подключен к R-входам первого и
гера, а второй вход - к инверсному выходу второго триггера, R-вход которого соединен с R-вкодом четвертого триггера и выходом четвертого элемента И-НЕ, первьш вход которого соединен с прямым выходом второго триггера и неинвертирукщим входом интегратора, а второй вход - с прямьш выходом четвертого триггера и инвертирующим входом интегратора, выход которого подютючен к входу силового преобразователя.
г
/а
4
1
15 Л
I I II
11
t
9ti&.}
| Трахтенберг P.M | |||
| Астатические имЛульсные системы электропривода с дискретным управлением | |||
| М.: Энергия, 1982, с | |||
| Приспособление, заменяющее сигнальную веревку | 1921 |
|
SU168A1 |
| 1976 |
|
SU826539A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
