Изобретение относится к элект технике, в частности к частотно-управляемым электроприводам переменного тока, и может быть использовано в системах с высокими требования1ли по качеству регулирования.
Известно устройство для управления асинхронной машиной с короткозамкнутым ротором, содержгицее преобрйзователь координат, блок задания активной и реактивной составляющих тока и формирователь опорных сигналов, выполне«ный на апериодических звеньях, входы которых подключены к датчикам фазных ЭДС 1.
Недостатком известного устройст-. ва; является небольшой диапазон линейного управления выходным моментом из-за наличия зоны нечувс-твительности в области частот, близких к нулю, при малых величинах ЭДС.
Наиболее близким по техническому решению к изобретению является устройство для управления асинхронной машиной с короткозамкнутым ротором, содержащее преобразователь координат, подключенный к блоку задания активной и реактивной составляюьгих тока машины и к формирователю опор,ньдх сигналов, выполненному на апериодических звеньях, входы которых подключены к датчикам фазных ЭДС 2,
Недостатком известного устройства является небольшой диапазон линейного управления из-за нгшичия зоны нечувствительности по управлению, определяемой погрешностями элементов.
Цель изобретения - увеличение ди10апазона линейного управления.
Указанная цель.достигается тем, что в устройство для управления асинхронной машиной с короткозс1мкну15тым ротором, содержащее преобразователь коорюииат, подключенный к блоку задания активной и реактивной составляющих тока асинхронной машины и к формировагелю опорных сигналов,
20 выполненному на апериодических . звеньях, входы которых подключены к датчикам фазных ЭДС введен управляемый блок коммутаций, входы и выходы которого подключены сооиветст25венно к выходам и входам формирователя опорны с сигналов, причем один из управляюогих входов блока коммутации дополнительно соединен с вы1ХСЩОМ блока задания для активной 30 с:оставляюией тока.
Кроме того, выход блока задания для реактивной составляющей тока подключен ко второму управляющему входу блока коммутаций.
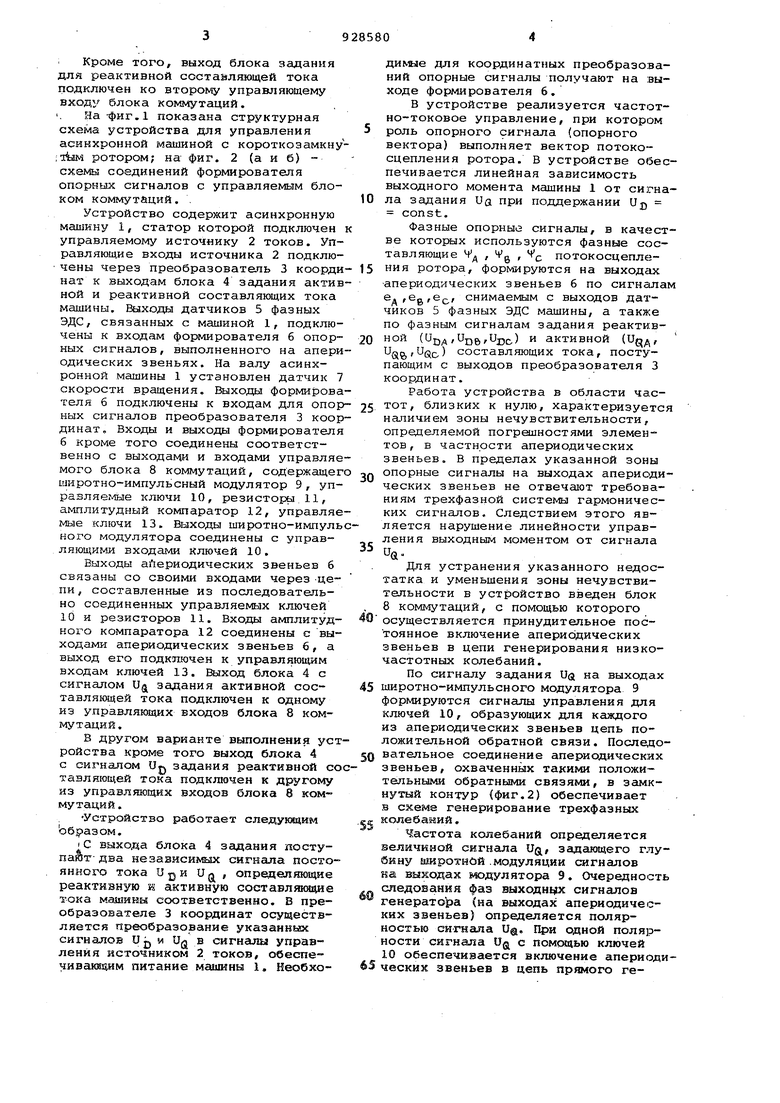
На -фиг,1 показана структурная схема устройства для управления асинхронной машиной с короткозамкнуП ыы ротором; на фиг. 2 (а и б) схемы соединений формирователя опорных сигналов с управляемым блоком коммутаций. .
Устройство содержит асинхронную машину 1, статор которой подключен к управляемому источнику 2 токов. Управляющие входы источника 2 подключены через преобразователь 3 координат к выходам блока 4 задания активной и реактивной составляющих тока машины. Выходы датчиков 5 фазных ЭДС, связанных с машиной 1, подключены к входам формирователя б опорных сигналов, выполненного на апериодических звеньях. На валу асинхронной машины 1 установлен датчик 7 скорости вращения. Выходы формирователя б подключены к входам для опорных сигналов преобразователя 3 координат. Входы и выходы Формирователя б кроме того соединены соответственно с выходами и входами управляемого блока 8 коммутаций, содержащего широтно-импульсный модулятор 9, управляег-ме ключи 10, резисторы . 11, амплитудный компаратор 12, управляемые ключи 13. Выходы широтно-импульсного модулятора соединены с управляющими входа У И Ключей 10.
Выходы аЛериодическнх звеньев б связаны со своими входами через-цепи , составленные из последовательно соединенных управляемых ключей 10 и резисторов 11. Входы амплитудного компаратора 12 соединены с выходами апериодических звеньев 6, а выход его подключен к управляющим входам ключей 13. йлход блока 4 с сигналом Ug задания активной составляющей тока подключен к одному из управляющих входов блока 8 коммутаций.
В другом варианте выполнения устройства кроме того выход блока 4 с сигналом Ujj задания реактивной составляющей тока подключен к другому из управляаощих входов блока 8 коммутаций.
Устройство работает следующим Ьбразом.
IС выхода блока 4 задания поступа т-два независимых сигнала постоянного тока и J3 и U(j , определяющие реактивную к активную составлявощие тока машины соответственно. В преобразователе 3 координат осуществляется преобразование указанных сигналов 0 VI UQ в сигналы управления источником 2 токов, обеспе™ чивакйадм питание машины 1. Необходимые для координатных преобразований опорные сигналы получают на выходе формирователя 6.
В устройстве реализуется частотно-токовое управление, при котором роль опорного сигнала (опорного вектора) выполняет вектор потокосцепления ротора. В устройстве обеспечивается линейная зависимость выходного момента машины 1 от сигнала задания Ua при поддержании Од const.
Фазные опорные сигналы, в каче;стве которых используются фазные составляющие , tg , fc потокосцеплегния ротора, формируются на выходcix апериодических звеньев б по сигнала e,,eg,e(-, снимаемым с выходов датчиков 5 фазных ЭДС машины, а также по фазным сигналам задания реактивной (UDA/Ung,,Ujo() и активной (, U(j,U(jo) составляющих тока, поступающим с выходов преобразователя 3 координат.
Работа устройства в области частот, близких к нулю, характеризуетс наличием зоны нечувствительности, определяемой погрешностями элементов, в частности апериодических звеньев. В пределах указанной зоны опорные сигналы на выходах апериодических звеньев не отвечают требованиям трехфазной системы гармонических сигналов. Следствием этого является нарушение линейности управления выходным моментом от сигнала
Для устранения указанного недостатка и уменьшения зоны нечувствительности в устройство введен блок 8 коммутаций, с помощью которого осуществляется принудительное постоянное включение апериодических звеньев в цепи генерирования низкочастотных колебаний.
По сигналу задания U(j на выходах широтно-импульсного модулятора 9 формируются сигналы управления для ключей 10, образующих для каждого из апериодических звеньев цепь положительной обратной связи. После,цовательное соединение апериодических звеньев, охваченных такими положительными обратными связями, в замкнутый КОНТУР (фиг.2) обеспечивает в схеме генерирование трехфазных колебаний.
Частота колебаний определяется величиной сигнала UQ, згщгиощего глубину широтной.модуляции сигналов ка выходах модулятора 9, Очередност следования фаз выходнщ: сигналов генератора (на выходах апериодических звеньев) опред1еляется полярностью сигнала U@. При одной полярности сигнала Ug с помснцью ключей 10 обеспечивается включение апериодческих звеньев в цепь прямого генерирования колебаний, а при другой полярности - в цепь обратного генерирования колебаний,
Для поддержания амплитуды колебаний на заданном уровне каждое из .апериодических звеньев охвачено цепью отрицательной обратной связи через ключи 13, управление которыми производится от амплитудного компаратора 12. На вход компаратора 12 поступает сигнал задання амплитуДЫ
Максимальная частота генерируемых. колебаний выбирается небольшой по величине в пределах 3-5% от рабочей частоты токов ротора. Указанные колебания при этом не оказывают существенного влияния на рабочие характеристики устройства, но в области низких частот, близких к нулю, позволяют усреднить ошибки элементовустройства и уменьшить зону нечувствительности устройства в целом.
Уменьшение зоны нечувствительности устройства обеспечивает в свою очередь увеличение диапазона линейного управления по моменту.
При изменении потока в машине, например, при двухзонном регулиро- вании, частота генерируемых в уст- а ройстве колебаний должна определяться обоими сигналами задания UQ и U(j с тем, чтобы поддерживать час-, тоту на одном и том же выбранном уровне в отношении к частоте токов ротора. В этом случае на вход широтно-импульсного модулятора 9 кроме сигнала U(« поступает дополнительно сигнал Ujj (фиг. 2а) .
Дополнительные меры по уменьше.нию в устройстве зоны нечувствительности и увеличению диапазона линейного управления связаны с использованием выходного сигнала датчика 7 скорости, подаваемого на вход широтно-импульсного модулятора 9 и на дополнительный вход преобразователя 3 координат (фиг. 1 и 2). Роль
сигнала аналогична роли сигнаша задания UQ.
Введение в устройство для управления асинхронной машиной с короткозамкнутым ротором блока ком/ таций, образующего из апериодических звеньев цепи генерирования колебаний и управляемого сигналами задания и сигналом скорости вращения позволяет в сравнении с известным уменьшить вдвое зону нечувствительности в области частот, близких к нулю, и соответственно увеличить диапазон линейного управления.
Формула изобретения
1.Устройство для управления асинхронной машиной с короткозамкнутым ротором, содержащее преобразователь координат, подключенный к блоку задания активной и реактивной составляющих тока асинхронной машин и к формирователю опорны сигналов, выполненному на апериодических звеньях, входы KOTOIMJX подключены
к выходам датчиков фазных ЭДС, о тл и.чающееся тем, что, с целью увеличения диапазона линейного управления, в него введен управляемый блок коммутаций, входы и выходы которого подключены соответственно к выходам и входам фop иpoвателя опорных сигналов, причем оди из управляющих входов блока коммутаций дополнительно соединен с выходом блока задания для активной составляющей тока.
2.Устройство по п. 1, отличающееся тем, что выход блока задания для реактивной составляющей тока подключен ко второму управляющему входу блока коммутаций.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 493882, кл. Н 02 Р 5/40, 1973.
2.Авторское свидетельство СССР 661705, кл. Н 02 Р 5/34, 1975.

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1981 |
|
SU1083319A1 |
| Электропривод переменного тока | 1979 |
|
SU849404A1 |
| Асинхронный электропривод с частотно-токовым управлением | 1984 |
|
SU1239824A1 |
| Электропривод с машиной переменного тока | 1976 |
|
SU675568A1 |
| Электропривод переменного тока с частотно-токовым управлением | 1985 |
|
SU1310990A1 |
| Электропривод переменного тока с частотно-токовым управлением | 1985 |
|
SU1310989A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1979 |
|
SU1108597A2 |
| Электропривод переменного тока (его варианты) | 1984 |
|
SU1249686A1 |
| Электропривод переменного тока | 1982 |
|
SU1508337A1 |
| Электропривод с асинхронной короткозамкнутой электрической машиной | 1978 |
|
SU765965A1 |

Dfoi1.
Wl.f
Af f {/и/,
Щ f aeUKV ff/fl
u
rl
0
If
Ll.
I ТрГ
4
UrJ
УШ i/g i/Л
ui.l
