Изобретение относится к электротехнике, в частности к области авто матического управления режимом синхронной машины, и может быть использовано в автоматических регуляторах возбуждения сильного действия.
Известен способ управления воз- буждением синхронной машины, основанный на измерении изменения частоты напряжения генератора и производной статорного тока, сравнении знаков результатов измерения и последующем отключении управляющих сигналов, оказывающих дестабилизирующее влияние на режим машины 1.
Недостатки этого способа заключаются в том, что включение и отключение управляющих сигналов выпол- . няется скачкообразно, что вносит возмущение в движение машины, не обеспечивается устойчивость при переходе из двигательного режима в генераторный и обратно.
Наиболее близким к .изобретению по технической сущности является способ управления возбуждением синхронной машины, при котором измеряют изменение частоты напряжения генератора и его производную. Этот способ заключается в суммировании сигналов при несовпадении знаков производной тока и отклонения частоты напряжения с остальными сигналами г регулирования и исключении сигнала по производной тока в случае совпадения по знаку упомянутых сигналов 2 .
Недостатки известного способа
10 состоят в скачкообразном включении и выключении стабилизирующих параметров, вносящем возмущение в движение машины, в возможность ложного срабатывания при параллельной работе
15 машин на общую линию, в сложности определения длительности включения воздействий по току во времени, что объясняется выбором релейной переключательной функции при введении
20 стабилизирующего воздействия, а также непосредственным использованием для стабилизации производной тока статора, неоднозначно связанной с изменением углов по линиям
25 электропередач и внутренним углом машины. Этим способом не удается также получить автоматическое изменение знака воздействия по частоте в полной, мере при переходе машины
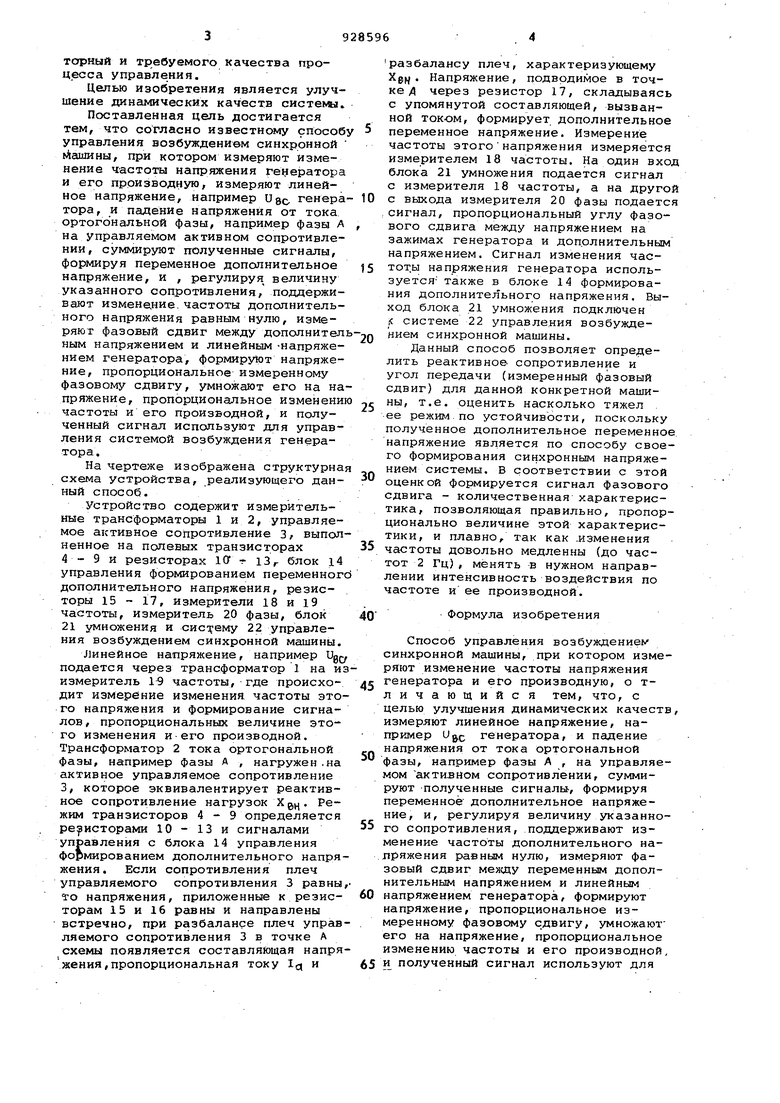
30 из двигательного режима в генераторный и требуемого качества процесса управления. Целью изобретения является улучшение динамических качеств систе№л Поставленная цель достигается тем, что согласно известному способ управления возбуждением синхронной Мешшны, при котором измеряют Изменение частоты напряжения геце ратора и его производную, измеряют линейное напряжение, например Ugc, генера тора, и падение напряжения от тока ортогональной фазы, например фазы А на управляемом активном сопротивлении, суммируют полученные сигналы, формируя переменное дополнительное напряжение, и , регулируя величину указанного сопротивления, поддерживают измене.ние, частоты дополнительного напряжения равным нулю, измеряют фазовый сдвиг между дополнител ным напряжением и линейным -напряжением генератора, формируют напряжение, пропорциональное измеренному фазовому сдвигу, умножают его на на пряжение, пропорциональное изменени частоты и его производной, и полученный сигнал используют для управления системой возбуждения генератора. На чертеже изображена структурна схема устройства, реализующего данный способ. Устройство содержит измерительные трансформаторы 1 и 2, управляемое активное сопротивление 3, выпол ненное на полевых транзисторах 4 - 9 и резисторах НУ l3r блок l4 управления формированием переменног дополнительного напряжения, резисторы 15 - 17, измерители 18 и 19 частоты, измеритель 20 фазы, блок 21 умножения и с1лст;&му 22 управления возбуждением синхронной машины. Линейное напряжение, например Ugj подается через трансформатор 1 на и измеритель 1-9 частоты, где происходит измерение изменения частоты это го напряжения и формирование сигналов , пропорциональных величине этого изменения и-его производной. Трансформатор 2 тока ортогональной фазы, например фазы А , нагружен .на активное управляемое сопротивление 3, которое эквивалентирует реактивное сопротивление нагрузок Хцц. Режим транзисторов 4 - 9 определяется резисторами 10 - 13 и сигналами управления с блока 14 управления формированием дополнительного напря жения. Если сопротивления плеч управляемого сопротивления 3 равны то напряжения, приложенные к резисторам 15 и 16 равны и направлены встречно, при разбалансе плеч управ ляемого сопротивления 3 в точке А схемы появляется составляющая напря жения,пропорциональная току Хд и разбалансу плеч, характеризующему Xgfj. Напряжение, подводимое в точке XJ через резистор 17, склсшываясь с упомянутой составляющей, вызванной током, формирует дополнительное переменное напряжение. Измерение частоты этогонапряжения измеряется измерителем 18 частоты. На один вход блока 21 умножения подается сигнал с измерителя 18 частоты, а на другой с выхода измерителя 20 фазы подается сигнал, пропорциональный углу фазового сдвига между напряжением на зажимах генератора и дополнительным напряжением. Сигнал изменения частот.ы напряжения генератора используется- также в блоке 14 формирования дополнительного напряжения. Выход блока 21 умножения подключен f. системе 22 управления возбуждением синхронной машины. Данный способ позволяет определить реактивное сопротивление и угол передачи (измеренный фазовый сдвиг) для данной конкретной машины, т.е. оценить насколько тяжел ее режим по устойчивости, поскольку полученное дополнительное переменное напряжение является по способу своего формирования синхронным напряжением системы. В соответствии с этой оценкой формируется сигнал фазового сдвига - количественная характеристика, позволяющая правильно, пропорционально величине этой характеристики, и плавно,, так как .изменения частоты довольно медленны (до частот 2 Гц), менять в нужном направлении интенсивность воздействия по частоте и ее производной. Формула изобретения Способ управления возбуждением синхронной машины, при котором измеряют изменение частоты напряжения генератора и его производную, о тличающийся тем, что, с целью улучшения динамических качеств, измеряют линейное напряжение, например V генератора, и падение напряжения от тока ортогональной фазы, например фазы А , на управляемом активном сопротивлении, суммируют -полученные сигналы, формируя переменное дополнительное напряжение, и, регулируя величину указанного сопротивления, поддерживают изменение частоты дополнительного напряжения равным нулю, измеряют фазовый сдвиг меясду переменным дополнительным напряжением и линейным напряжением генератора, формируют напряжение, пропорциональное измеренному фазовому сдвигу, умножаютего на напряжение, пропорциональное изменению частоты и его производной, и полученный сигнал используют для
управления системой возбуждения синхронной машийы.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельст во СССР 330520, кл. Н 02 Р 9/14, 1970.
2.Авторское свидетельство СССР № 379040, кл. Н 02 Р 9/14, 1970,

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования тока возбуждения синхронной машины | 1987 |
|
SU1534743A1 |
| Способ управления бесщеточной синхронной машиной | 1985 |
|
SU1305821A1 |
| Устройство для определения интенсивности и знака воздействия по изменению частоты в регуляторе возбуждения синхронной машины | 1980 |
|
SU944053A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПРОВОДИМОСТИ И ИМПЕДАНСА РАСТВОРОВ ЭЛЕКТРОЛИТОВ И БИОЛОГИЧЕСКИХ ЖИДКОСТЕЙ | 2021 |
|
RU2753465C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПОЛНОГО СОПРОТИВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2092861C1 |
| Устройство для определения крутящего момента на валу синхронного электродвигателя | 1989 |
|
SU1719935A1 |
| СПОСОБ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2000 |
|
RU2164053C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2152001C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЕМКОСТИ ПОЛУПРОВОДНИКОВОГО ПРИБОРА | 2012 |
|
RU2498325C1 |
| Способ управления бесщеточной синхронной машиной | 1988 |
|
SU1624657A2 |
