Изобретение относится к технике автоматического регулирования и может быть использовано, например, в устройствах числового программного управления станками и промьпяленными роботами.
Цель изобретения - повышение точ- -ности работы устройства для программного управления приводом.
Для повышения точности устройства необходимо обеспечить стабилизацию формы сигналов питания датчика положения путем исключения искажений, вносимых переходными процессами на выходах первого и второго сумматоров С этой целью в устройство введен регистр, управляющий вход которого объединен с входом делителя частоты, а информационные входы подключены к выходам сумматоров, что обеспечивает фиксацию сигналов с выходов сумматоров в момент, когда переходньге процессы в комбинационной части сумматоров закончены. Снижение точности известных устройств программного управления приводами обусловлено также наличием в них малых автоколебаний выходного вала, амплитуда которых пропорциональна весу младшего разряда кода управления приводом в первом реверсивном счетчике. Для устранения вJlияния этого явления на точность работы предлагаемого устройства в него введен распределитель импульсов, обеспечивающий прохождение авто колебательного сигнала через третьи входы первого и второго сумматоров и блокирующий их прохож,цение на вход реверсивного счетчика,
В динамических режимах точность устройства повышается за счет включения блока сложения-вычитания на входе реверсивного счетчика, что обеспечивает инвариантность устройства, по управляющему воздействию и тем самым повышение точности его работы.
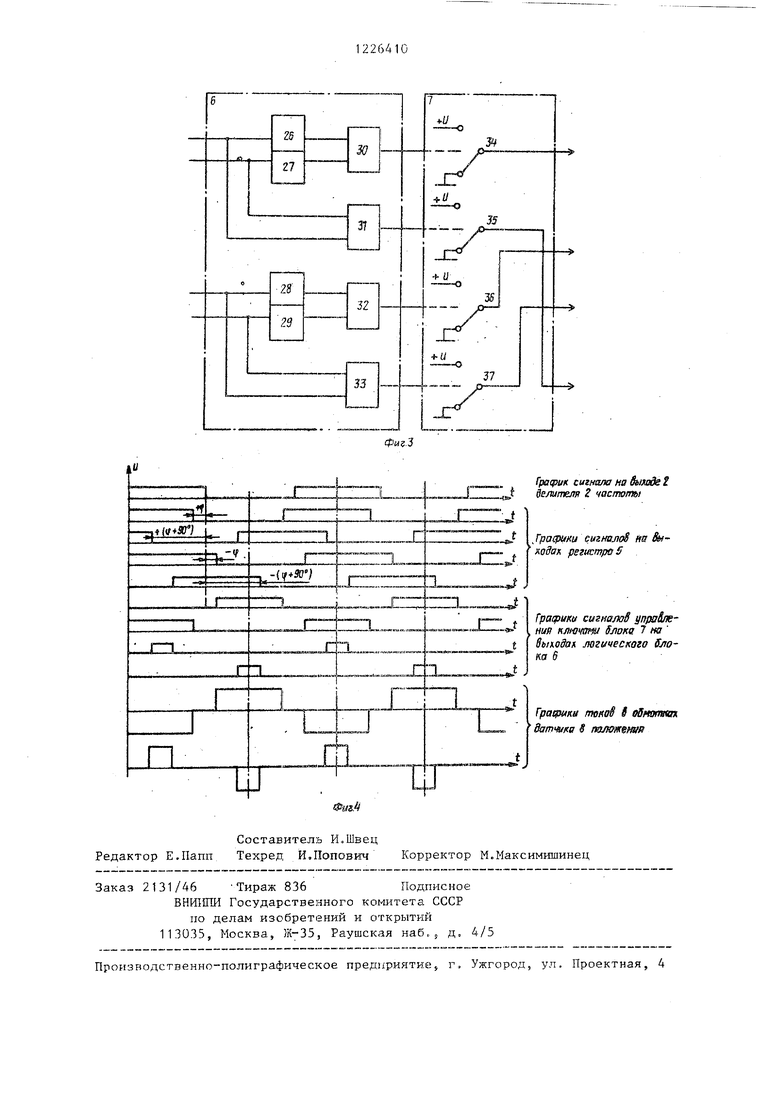
На фиг. 1 приведена структурная с хема устройства ; на фиг. 2 - пример решения распределителя импульсов ; на фиг. 3 - пример решения логического блока; на фиг. 4 - временные диаграммы работы устройства.
Устройство содержит генератор 1 импульсов, делитель 2 частоты,, первый 3 и второй 4 сумматоры, регистр 5, логический блок 6, блок 7 ключей, датчик 8 положения привода, фильтр 9
5
5
5
0
0
5
0
5
демодулятор 10, интегратор 11, преобразователь 12 напряжение-частота, распределитель 13 импульсов, первый реверсивный счетчик 14 импульсов, блок 15 сложения-вычитания, второй реверсивный счетчик 16 импульсов и цифроансшоговый преобразователь 17.
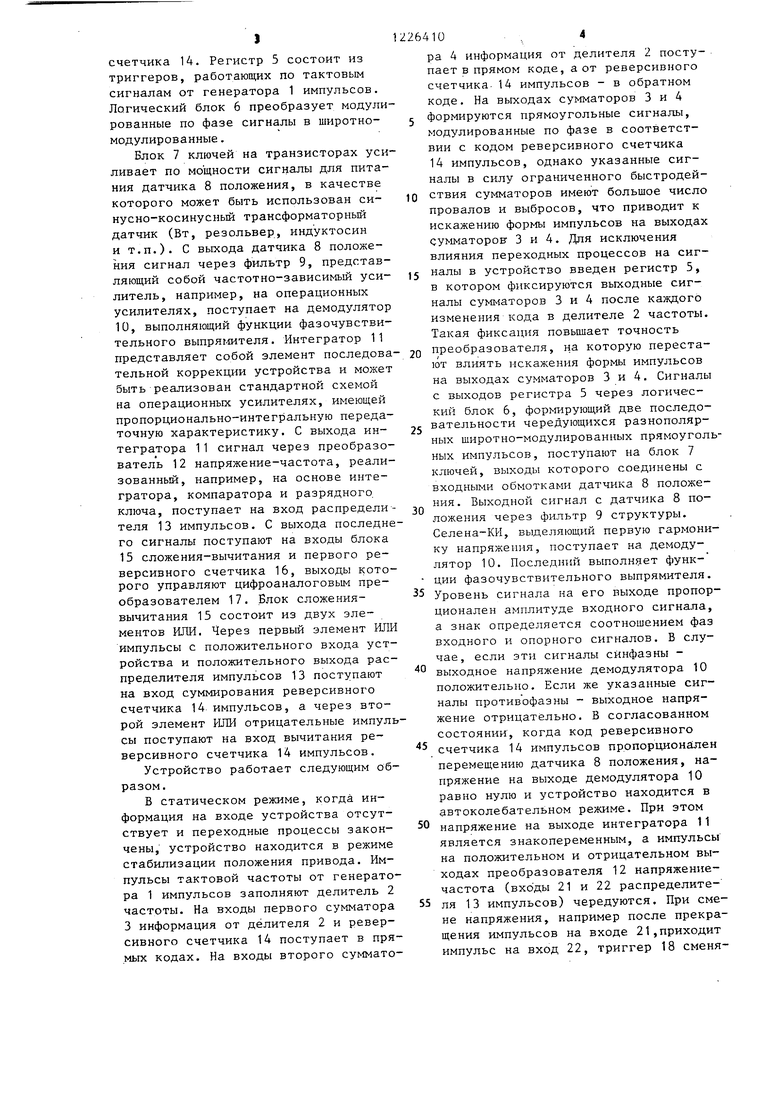
Распределитель 13 импульсов (фиг. 2) состоит из RS-триггера 18, элементов И 19 и 20, имеет входы 21 и 22, первые выходы 23 и 24 и дополнительный выход 25.
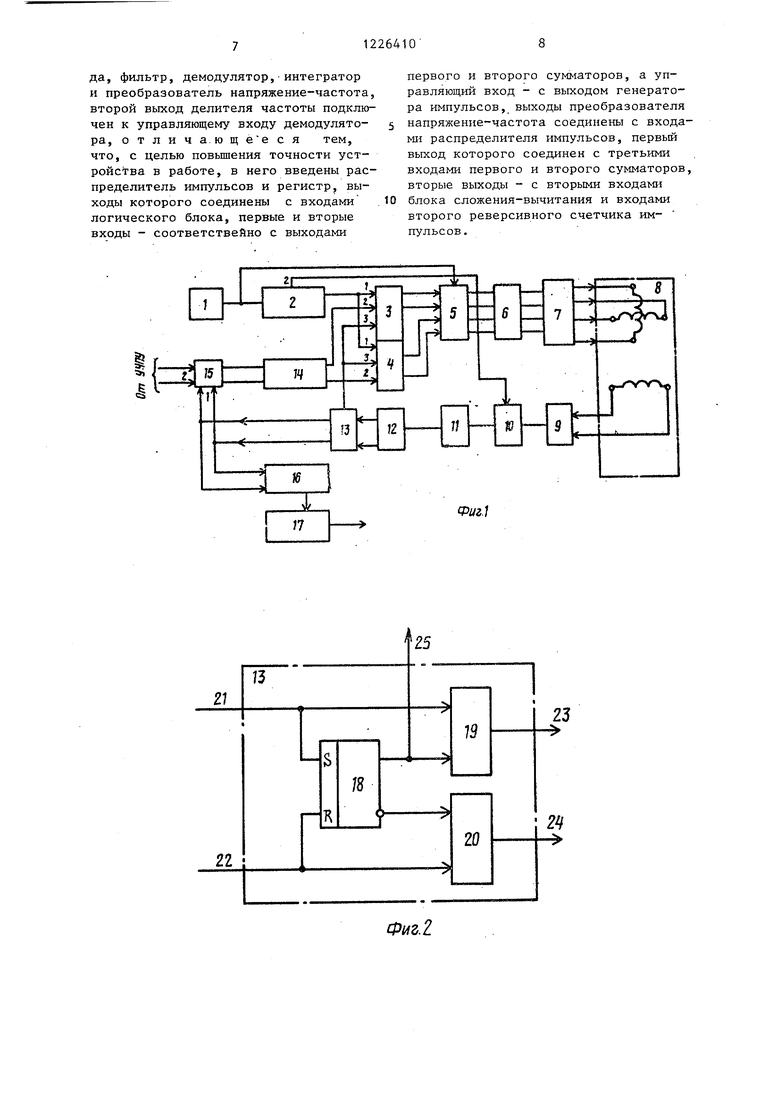
Логический блок 6 (фиг. 3) имеет элементы НЕ 26-29, элемент И 30-33, а блок 7 ключей показан в виде эквивалентной схемы, где показаны ключи 34-37.
Сигнал на демодулятор 10 снимается со старшего (п-го) разряда делителя 2 5 где п число разрядов делителя 2 и реверсивного счетчика 14, что связано с необходимостью подачи на демодулятор опорного сигнала, равного по частоте сигналу питания датчика. В случае двоичной реализации делителя 2 период опорного сигнала в 2 раз превьш1ает период следования импульсов на выходе генератора 1,
Регистр 5 состоит из триггеров типа 3) . Информация, поступившая на входные линии такого триггера к моменту возникновения перепада или фронта тактового сигнала, определяет каким будет состояние выхода на последующем интервале времени. Фиксирующие схемы - защелки и регистры позволяют запомнить комбинацию двоичных разрядов, поданную на их входы, и хранить ее после изменения входных сигналов.
Переходные процессы, возникающие в сумматорах 3 и 4 после каждого изменения кода в счетчике 2 по сигналу с генератора 1, вызьшают появление провалов и выбросов на выходах сумматоров. Для исключения переходных процессов регистр 5 фиксирует сигналы с выходов сумматоров после окончания переходных процессов.
Генератор 1 импульсов соединен с входом записи регистра 5 и входом делителя 2 частоты, представляющего собой двоичный или двоично-десятич- счетчик. Сумматоры 3 и 4 представляют собой стандартные сумматоры, четырехразрядные двоичные сумматоры, осуществляющие сравнение кодов дeлитeJтя 2 частоты и реверсивного
счетчика 14. Регистр 5 состоит из триггеров, работающих по тактовым сигналам от генератора 1 импульсов. Логический блок 6 преобразует модулированные по фазе сигналы в широтно- модулированные.
Блок 7 ключей на транзисторах усиливает по мощности сигналы для питания датчика 8 положения, в качестве которого может быть использован си- нусно-косинусный трансформаторный датчик (Вт, резольвер, индуктосин и т.п.). С выхода датчика 8 положения сигнал через фильтр 9, представляющий собой частотно-зависимый усилитель, например, на операционных усилителях, поступает на демодулятор 10, выполняющий функции фазочувстви- тельного выпря1л теля. Интегратор 11 представляет собой элемент последовательной коррекции устройства и может быть реализован стандартной схемой на операционных усилителях, имеющей пропорционально-интегральную передаточную характеристику. С выхода интегратора 11 сигнал через преобразователь 12 напряжение-частота, реализованный, например, на основе интегратора, компаратора и разрядного ключа, поступает на вход распределителя 13 импульсов. С выхода последне го сигналы поступают на входы блока 15 сложения-вычитания и первого реверсивного счетчика 16, выходы которого управляют цифроаналоговым преобразователем 17. Блок сложения- вычитания 15 состоит из двух элементов ИЛИ. Через первый элемент ИЛИ импульсы с положительного входа устройства и положительного выхода распределителя импульсов 13 поступают на вход суммирования реверсивного счетчика 14 импульсов, а через второй элемент ИЛИ отрицательные импульсы поступают на вход вычитания реверсивного счетчика 14 импульсов.
Устройство работает следующим образом.
В статическом режиме, когда информация на входе устройства отсутствует и переходные процессы закончены, устройство находится в режиме стабилизации положения привода. Импульсы тактовой частоты от генератора 1 импульсов заполняют делитель 2 частоты. На входы первого сумматора 3 информация от делителя 2 и реверсивного счетчика 14 поступает в прямых кодах. На входы второго суммато226410 ., 4
ра 4 информация от делителя 2 поступает в прямом коде, а от реверсивного счетчика.14 импульсов - в обратном коде. На выходах сумматоров 3 и 4 J формируются прямоугольные сигналы, модулированные по фазе в соответствии с кодом реверсивного счетчика 14 импульсов, однако указанные сигналы в силу ограниченного быстродей- 10 ствия сумматоров имеют большое число провалов и выбросов, что приводит к искажению формы импульсов на выходах сумматоров: 3 и 4. Для исключения влияния переходных процессов на ей:- )5 налы в устройство введен регистр 5, в котором фиксируются выходные сигналы сумматоров 3 и 4 после каждого изменения кода в делителе 2 частоты. Такая фиксация повышает точность 20 преобразователя, на которую перестают влиять искажения формы импульсов на выходах сумматоров 3 и 4. Сигналы с выходов регистра 5 через логический блок 6, формирующий две последо25
вательности чередующихся разнополяр
ных широтно-модулированных прямоугольных импульсов, поступают на блок 7 ключей, выходы которого соединены с входными обмотками датчика 8 положения. Выходной сигнал с датчика 8 положения через фильтр 9 структуры. Селена-КИ, выделяющий первую гармонику напряжения, поступает на демодулятор 10. Последний выполняет функ- ции фазочувствительного выпрямителя.
Уровень сигнала на его выходе пропорционален амплитуде входного сигнала, а знак определяется соотношением фаз входного и опорного сигналов. Б случае, если эти сигналы сИнфазны выходное напряжение демодулятора 10 положительно. Если же указанные сигналы противофазны - выходное напряжение отрицательно. В согласованном состоянии, когда код реверсивного
счетчика 14 импульсов пропорционален перемещению датчика 8 положения, напряжение на выходе демодулятора 10 равно нулю и устройство находится в автоколебательном режиме. При этом
напряжение на выходе интегратора 11 является знакопеременным, а импульсы на положительном и отрицательном выходах преобразователя 12 напряжение- частота (вхо ды 21 и 22 распределителя 13 импульсов) чередуются. При смене напряжения, например после прекращения импульсов на входе 21,приходит импульс на вход 22, триггер 18 сменяет свое значение по заднему фронту импульса, изменяя значение выхода 25 а сам импульс блокируется элементом И 20. Второй и последующие импульсы с входа 22 беспрепятственно проходят на выход 24. Таким образом, распределитель 13 импульсов блокирует прохождение первого импульса с входов 2 и 22 на выходы 23 и 24 соответствен- но при изменении знака направления, а сам знак направления в виде логического сигнала присутствует на дополнительном выходе 25 распределителя 13 импульсов. Таким образом, в статическом режиме устройство остается заьжнутым по цепи обратной за счет сигнала на дополнительном выходе распределителя 13 импульсов, значение которого определяется зна- ком напряжения на выходе интегратора 11. При этом распределитель 13 импульсов блокирует прохождение сигналов на входе блока 15 сложения-вычитания и первого реверсивного с счетчика 16, код которого, оставаяс нулевым, обеспечивает неподвилсност, привода.
При изменении положения датчика 8 например, за счет возмущающего воз- действия, на выходах демодулятора 10 и интегратора 11 формируется напряжение, полярность которого зависит от напряжения смещения датчика 8, С выхода преобразователя 12 напряже-ние частота импульсы через распределитель 13 и блок 15 сложения-вычитания изменяют код реверсивного счетчика 14 импульсов на величину Л Х, пропорциональную величине перемеще- ния датчика 8. Величина U X также вписывается в первьй реверсивный счетчик, вызывая появдение напряжения на выходе устройства, обеспечивающего перемещение привода в сторо- ну компенсации возмущенного перемещения датчика 8 Такое движение продолжается до обнуления первого реверсивного счетчика и возвращения реверсивного счетчика 14 в состоя- ние, соответствующее нeвoз ryщeннo fy положению датчика 8,
В динамическом режиме,, когда на вход устройства поступают задающие импульсы, происходят процессы., аналогичные описаннь. Так, например, при движении привода с постоянной скоростью задающие импульсы через
5 10 15 30 25
30 5 0 5 0
5
блок 15 сложения-вычитания поступают на входы второго реверсивного счетчика, причем, если скорость движения привода соответствует заданной (скорости перемещения датчика 8 и кода счетчика 14 импульсов равны), импульсы на выходе распределителя 13 импульсов не формируются и устройство работает в режиме малых отклонений (аналогично статическому режиму) . При наличии разности в скорости привода и задающего воздействия код реверсивного счетчика 16 импульсов соответственно изменяется, обеспечивая уменьшение или увеличение скорости привода для приведения ее к заданному значению.
Таким образом, применение регистра при формировании фазомодулирован- ных сигналов позволяет повысить статическую точность устройства за счет исключения коротких импульсов в сигналах питания датчика. Включение в состав устройства распределителя им- пульсоз позволяет подавить малые автоколебания выходного напряжения устройства. Перенос блока сложения-вь - читания на вход второго реверсивного с- гетчика позволяет обеспечить в устройстве инвариантность по управляющее/ воздействию в режиме постоянной скорости, что позволяет значительно повысить точность работы устройства при больших скоростях перемещения.
Формула изобретения
Устройство для программного управления приводом, содержащее генератор импульсов, выход которого соединен с входом делителя частоты, первый выход которого соединен с первыми входа ш первого и второго сумматоров, первый реверсивный счетчик имд;/льсоБ, первый и второй выходы которого соединены с вторыми входами первого и второго сумматоров соответственно, а входы первого реверсивного счетчика импульсов соединены через блок сложения-вычитания с входами з стройства для программного управления приводом, второй реверсивный счетчик импульсов, подключен- нь;й ; Ь кодом к входу цифроан.алогового преобразователя, а также последовательно соединенные логический блок, блок ключей, датчик положения привода, фильтр, демодулятор, интегратор и преобразователь напряжение-частота, второй выход делителя частоты подключен к управляющему входу демодулятора, отлича.ющ е е с я тем, что, с целью повьшения точности устройства в работе, в него введены распределитель импульсов и регистр, выходы которого соединены с входами логического блока, первые и вторые входы - соответствейно с выходами
первого и второго сумматоров, а управляющий вход - с выходом генератора импульсов, выходы преобразователя напряжение-частота соединены с входами распределителя импульсов, первый выход которого соединен с третьими входами первого и второго сумматоров, вторые выходы - с вторыми входаъп блока сложения-вычитания и входами второго реверсивного счетчика им- пульсов.
1
Фаг1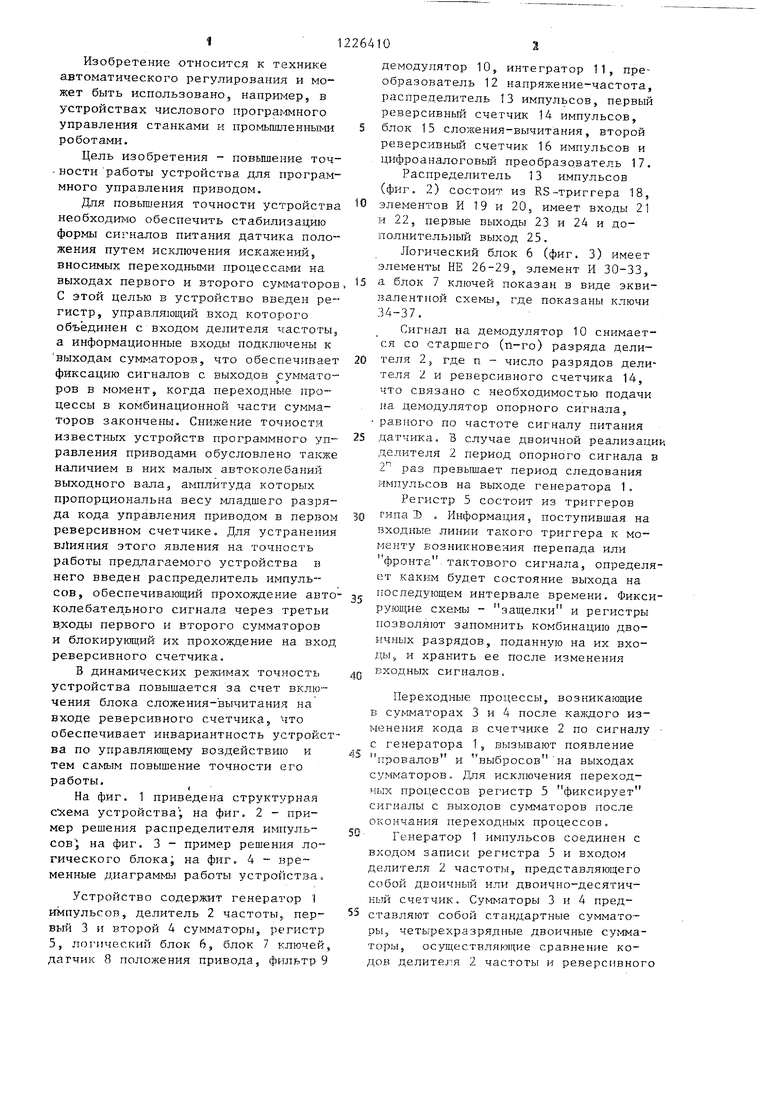

| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угла поворота вала в код | 1982 |
|
SU1020845A1 |
| Широтно-импульсное устройство для программного управления приводом | 1981 |
|
SU1020799A1 |
| Преобразователь угловых перемещений в код | 1985 |
|
SU1311024A1 |
| РЕВЕРСИВНЫЙ ЧИСЛО-ИМПУЛЬСНЫЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2009 |
|
RU2429563C1 |
| Преобразователь угловых перемещений в код | 1982 |
|
SU1035627A1 |
| Стенд для испытания энергоустановок электромобилей | 1985 |
|
SU1255890A1 |
| Устройство для преобразования "перемещение-код-фаза | 1978 |
|
SU746653A1 |
| Электропривод | 1987 |
|
SU1476584A1 |
| Преобразователь угла поворота вала в код | 1986 |
|
SU1320902A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ТРАВЕРСЫ ГИДРАВЛИЧЕСКОГО ПРЕССА | 1992 |
|
RU2006370C1 |
Изобретение относится к технике автоматического регулирования и может быть использовано, например, в устройствах числового программного . управления станками и промьшленными роботами. Целью изобретения является повышение точности работы устройства для программного управления приводом. Устройство содержит генератор импульсов, делитель частоты, первьш выход которого соединен с первым входом первого и второго сумматоров, первый реверсивлый счетчик импульсов, блок сложения-вычитания, второй реверсив- ньш счетчик импульсов, цифроаналого- вый преобразователь, логический блок, блок ключей, датчик положения привода, фильтр, демодулятор, интегратор, преобразователь напряжение - частота, регистр и распределитель импульсов. Введение регистра при формировании фазомодулированных сигналов позволяет повысить статическую точность устройства за счет исключения коротких 1-1Мпульсов в сигналах питания датчика толожения привода, а включение в состав устройства распределителя импульсов позволяет подавить малые колеба- Г1ИЯ выходного напряжения устройства 5 4 ил..I i (Л С
Фиг.2
Составитель И.Швец Редактор Е.Папп Техред ЙЛТопович Корректор М.Максимишинец
Заказ 2131/46 Тираж 836Подписное
ВНШШИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,,,, д, 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
paq}UK сигнала но былпдг S J: де/шпк/т 2 чвстоггк
, Графика сигнал( м Вы- регистра S .
fpaqjuKu сигнало8 упраВле- нии SJIOKS 7 «7 вынодак логического 5лот S
Гра1рака такое И eSftorram 57/nww S ладайгела
| Башарин А,В | |||
| и др | |||
| Управление электроприводами | |||
| - Л.: Энергоиздат, 1982, с | |||
| Автоматический переключатель для пишущих световых вывесок | 1917 |
|
SU262A1 |
| Широтно-импульсное устройство для программного управления приводом | 1981 |
|
SU1020799A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
