(5) УСТРОЙСТВО для ПРОГРАММНОГО УПРАВЛЕНИЯ СТАНКОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая система для программного управления двигателем | 1986 |
|
SU1320793A1 |
| Устройство для программного управления | 1984 |
|
SU1241195A1 |
| Устройство для индикации | 1979 |
|
SU873266A1 |
| СИСТЕМА ПОЗИЦИОННОГО ПРОГРАММНОГО УПРАВЛЕНИЯ МЕТАЛЛОРЕЖУЩИМИ СТАНКАМИ | 1970 |
|
SU269246A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ ГРУППОЙ ЕДИНИЦ ТЕХНОЛОГИЧЕСКОГО ОБОРУДОВАНИЯ | 1991 |
|
RU2020537C1 |
| СИСТЕМА УПРАВЛЕНИЯ ШАГАЮЩИМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1990 |
|
RU1739607C |
| Устройство для позиционного программного управления с самоконтролем | 1982 |
|
SU1072002A1 |
| Устройство для программного регулирования температуры | 1957 |
|
SU1442979A1 |
| Многопрограммный регулятор температуры | 1983 |
|
SU1136123A1 |
| Устройство для адаптивного программного управления металлорежущими станками | 1980 |
|
SU964581A1 |
I
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах автоматического управления координатными перемещениями исполнительных органов станков
Известно устройство для программного управления, содержащее блок измерения временного интервала, подключенный к блоку ввода программы и преобразователю аналог-код, и времякодовый преобразователь, соединяемый с арифметическим блоком, подключенным к блоку ввода программы, через регистр и преобразователь код-аналог к приводу и через преобразователь аналог-код к датчику положения tl.
Наиболее близкой по технической сущности к изобретению является цифровая система позиционного регулирования, содержащая последовательно соединенные программно-задающее устройство, сумматор, цифро-аналоговый преобразователь, блок допускового
контроля, блок сигнализации отказа, датчик обратной связи, второй блок допускового контроля и сигнализатор останова привода 2.
К недостаткам известной системы, кроме выше перечисленных, следует отнести отсутствие контроля правильности считывания информации с программно-задающего устройства и невысокую точность работы, так как после
10 выполнения исполнительными механизмами каждой позиции сумматор возвращается на нуль и от конечного положения исполнительного механизма в этой позиции производится отсчет следующего
IS перемещения, что может привести к накоплению ошибок, а также большая сложность и низкая надежность системы.
Цель изобретения - повышение на20дежности устройства.
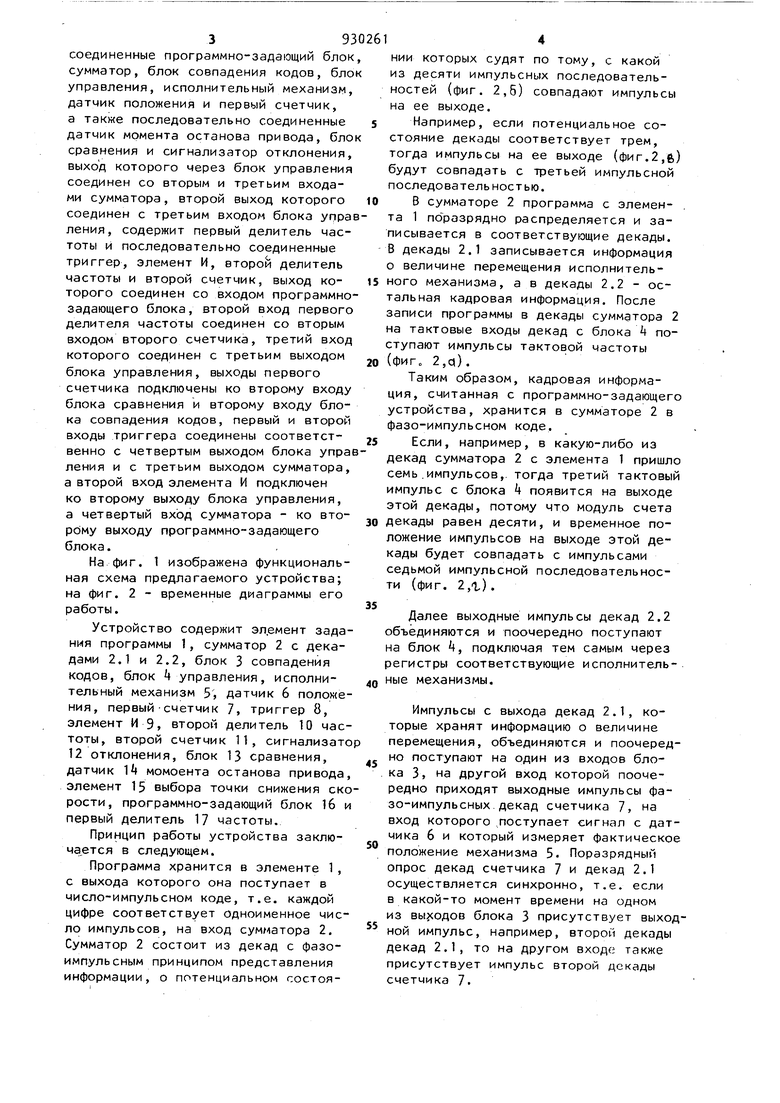
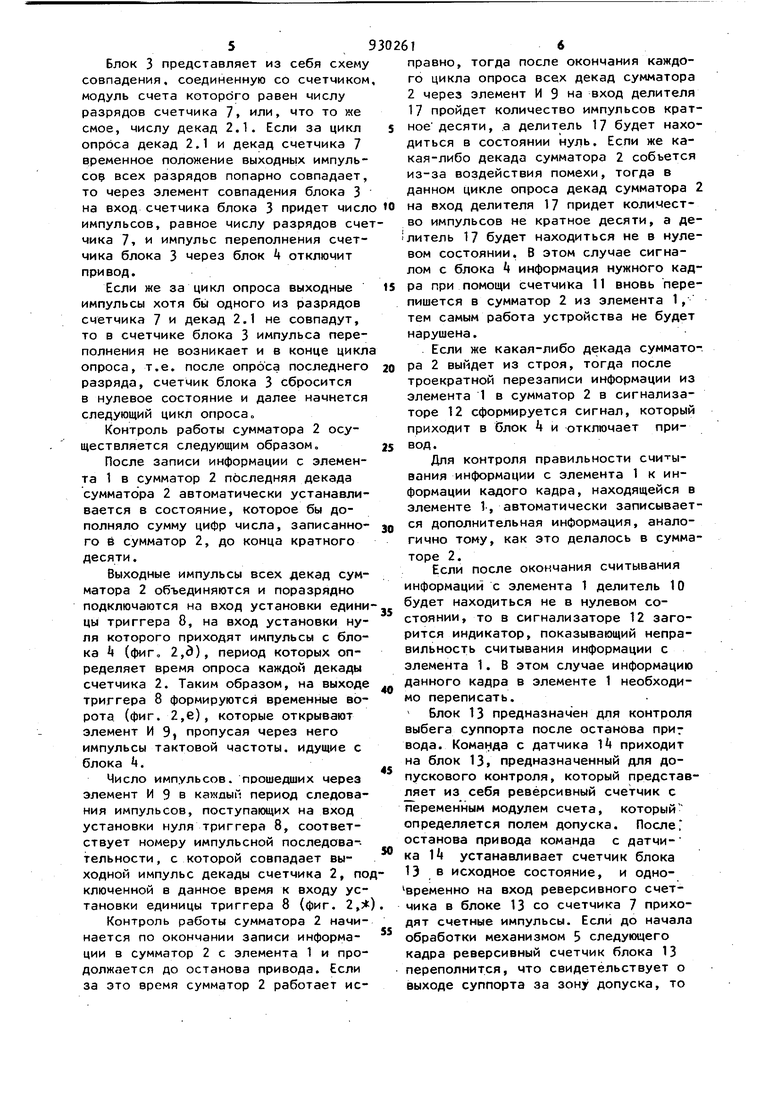
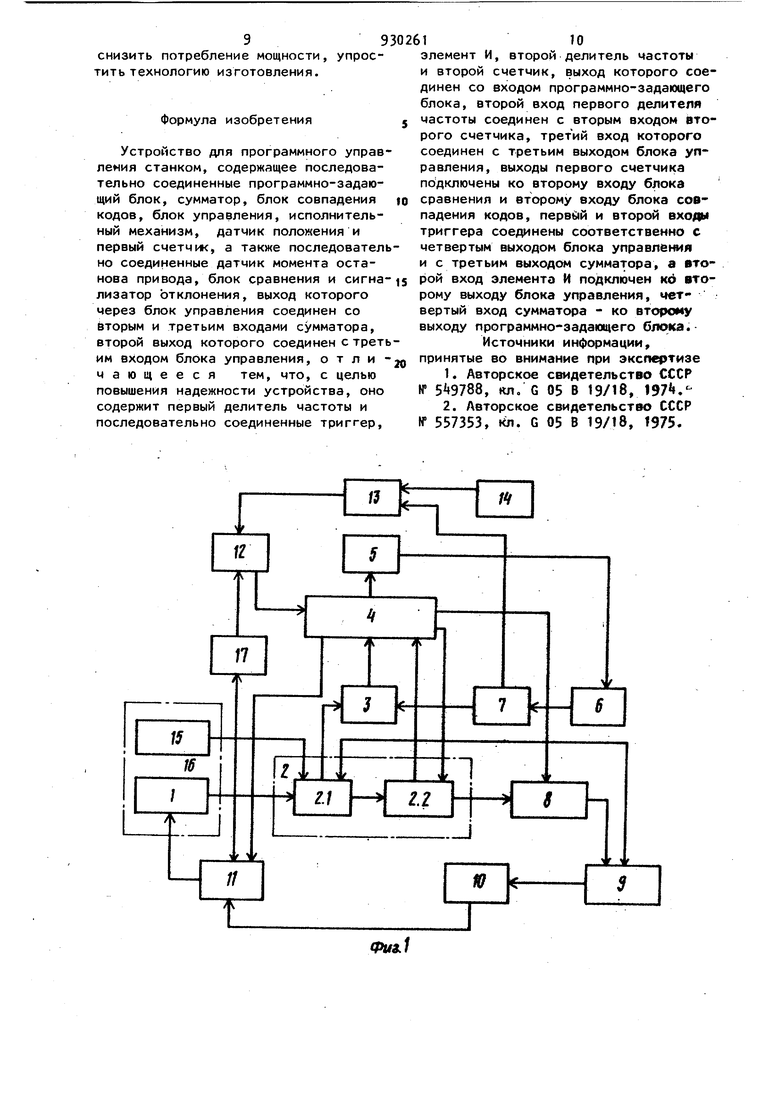
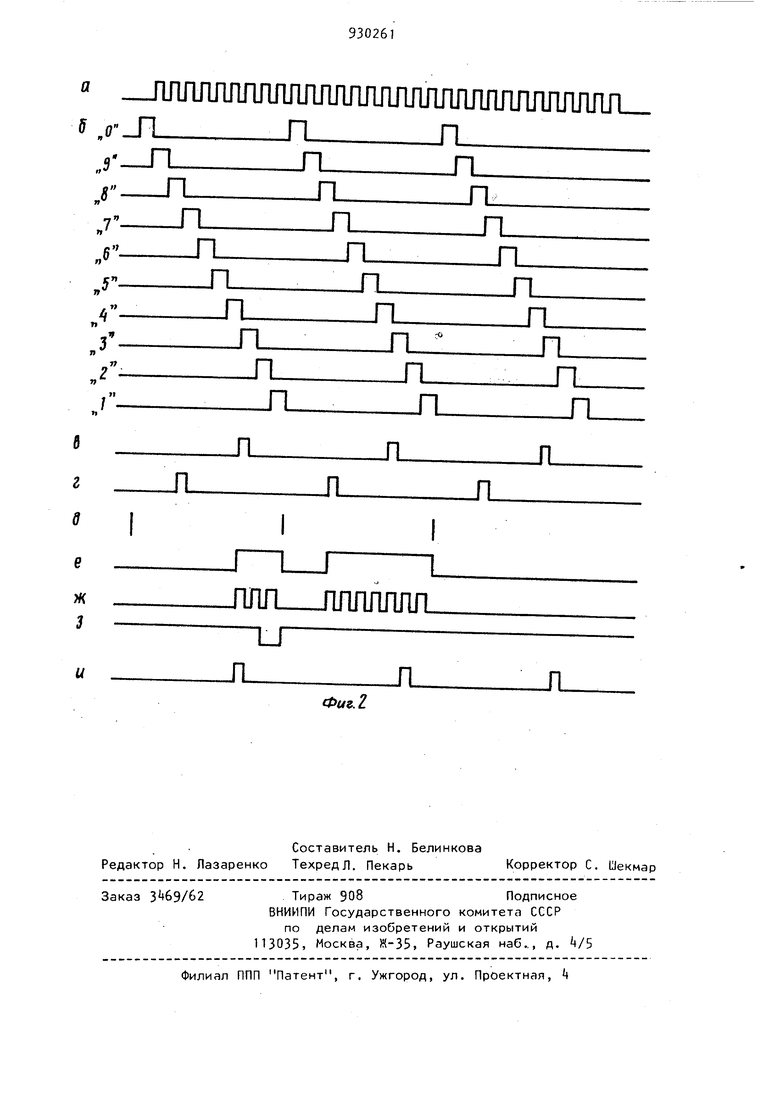
Эта цель достигается тем, что устройство для программно/о управления станком, содержащее последовательно 393 соединенные программно-задающий блок сумматор, блок совпадения кодов, бло управления, исполнительный механизм, датчик положения и первый счетчик, а также последовательно соединенные датчик момента останова привода, бло сравнения и сигнализатор отклонения, выход которого через блок управления соединен со вторым и третьим входами сумматора, второй выход которого соединен с третьим входом блока упра ления, содержит первый делитель частоты и последовательно соединенные триггер, элемент И, второй делитель частоты и второй счетчик, выход которого соединен со входом программно задающего блока, второй вход первого делителя частоты соединен со вторым входом второго счетчика, третий вход которого соединен с третьим выходом блока управления, выходы первого счетчика подключены ко второму входу блока сравнения и второму входу блока совпадения кодов, первый и второй входы триггера соединены соответственно с четвертым выходом блока упра ления и с третьим выходом сумматора, а второй вход элемента И подключен ко второму выходу блока управления. а четвертый вход сумматора - ко вторбму выходу программно-задающего блока. На фиг. 1 изображена функциональная схема предлагаемого устройства; на фиг. 2 - временные диаграммы его работы. Устройство содержит эл.емент задания программы 1, сумматор 2 с декадами 2.1 и 2.2, блок 3 совпадения кодов, блок t управления, исполнительный механизм 5, датчик 6 положения, первыйсчетчик 7, триггер 8, элемент И 9, второй делитель 10 частоты, второй счетчик 11, сигнализато 12 отклонения, блок 13 сравнения, датчик 1 момоента останова привода элемент 15 выбора точки снижения ско рости, программно-задающий блок 16 и первый делитель 17 частоты. Принцип работы устройства заключа.ется в следующем. Программа хранится в элементе 1, с выхода которого она поступает в число-импульсном коде, т.е. каждой цифре соответствует одноименное число импульсов, на вход сумматора 2. Сумматор 2 состоит из декад с фазоимпульсным принципом представления информации, о потенциальном состояНИИ которых судят по тому, с какой из десяти импульсных последовательностей (фиг. 2,5) совпадают импульсы на ее выходе. Например, если потенциальное состояние декады соответствует трем, тогда импульсы на ее выходе (фиг.2,ft) будут совпадать с третьей импульсной последовательностью. В сумматоре 2 программа с злемен- . та 1 поразрядно распределяется и записывается в соответствующие декады. В декады 2.1 записывается информация о величине перемещения исполнительного механизма, а в декады 2.2 - остальная кадровая информация. После записи программы в декады сумматора 2 на тактовые входы декад с блока 4 поступают импульсы тактовой частоты (фиго 2,0). Таким образом, кадровая информация, считанная с программно-задающего устройства, хранится в сумматоре 2 в фазо-импульсном коде. Если, например, в какую-либо из декад сумматора 2 с элемента 1 пришло семь .импульсов,, тогда третий тактовый импульс с блока 4 появится на выходе этой декады, потому что модуль счета декады равен десяти, и временное положение импульсов на выходе этой декады будет совпадать с импульсами седьмой импульсной последовательности (фиг. 2,1). Далее выходные импульсы декад 2.2 объединяются и поочередно поступают на блок 4, подключая тем самым через регистры соответствующие исполнительные механизмы. Импульсы с выхода декад 2.1, которые хранят информацию о величине перемещения, объединяются и поочередно поступают на один из входов бло. ка 3, на другой вход которой поочередно приходят выходные импульсы фазо-импульсных.декад счетчика 7, на вход которого поступает сигнал с датчика 6 и который измеряет фактическое положение механизма 5. Поразрядный опрос декад счетчика 7 и декад 2.1 осуществляется синхронно, т.е. если в какой-то момент времени на одном из выводов блока 3 присутствует выходной импульс, например, второй декады декад 2.1, то на другом входе также присутствует импульс второй декады счетчика 7. Блок 3 представляет из себя схему совпадения, соединенную со счетчиком, модуль счета которого равен числу разрядов счетчика 7, или, что то же смое, числу декад 2.1. Если за цикл опроса декад 2.1 и декад счетчика 7 временное положение выходных импульС09 всех разрядов попарно совпадает, то через элемент совпадения блока 3 на вход счетчика блока 3 придет число импульсов, равное числу разрядов счет чика 7, и импульс переполнения счетчика блока 3 через блок отключит привод. Если же за цикл опроса выходные импульсы хотя бы одного из разрядов счетчика 7 и декад 2.1 не совпадут, то в счетчике блока 3 импульса переполнения не возникает и в конце цикл опроса, т.е. после опроса последнего разряда, счетчик блока 3 сбросится в нулевое состояние и далее начнется следующий цикл опроса. Контроль работы сумматора 2 осуществляется следующим образом После записи информации с элемента 1 в сумматор 2 последняя декада сумматора 2 автоматически устанавливается в состояние, которое бы дополняло сумму цифр числа, записанного в сумматор 2, до конца кратного десяти. Выходные импульсы всех декад сумматора 2 объединяются и поразрядно подключаются на вход установки едини цы триггера 8, на вход установки нуля которого приходят импульсы с блока (фиГа 2,д), период которых определяет время опроса каждой декады счетчика 2. Таким образом, на выходе триггера 8 формируются временные ворота (фиг. 2,е), которые открывают элемент И 9, пропусая через него импульсы тактовой частоты, идущие с блока k. Число импульсов, прошедших через элемент И 9 в каждый период следования импульсов, поступающих на вход установки нуля триггера 8, соответствует номеру импульсной последова-тельности, с которой совпадает выходной импульс декады счетчика 2, по ключенной в данное время к входу установки единицы триггера 8 (фиг. 2,: Контроль работы сумматора 2 начинается по окончании записи информации в сумматор 2 с элемента 1 и продолжается до останова привода. Если за это время сумматор 2 работает исправно, тогда после окончания каждого цикла опроса всех декад сумматора 2 через элемент И 9 на вход делителя 17 пройдет количество импульсов кратное десяти, а делитель 17 будет находиться в состоянии НУЛЬ. Если же какая-либо декада сумматора 2 собьется из-за воздействия помехи, тогда в данном цикле опроса декад сумматора 2 на вход делителя 17 придет колимество импульсов не кратное десяти, а делитель 17 будет находиться не в нулевом состоянии, в этом случае сигналом с блока А информация нужного кадра при помощи счетчика 11 вновь перепишется в сумматор 2 из элемента 1, тем самым работа устройства не будет нарушена. Если же какая-либо декада суммато-. ра 2 выйдет из строя, тогда после троекратной перезаписи информации из элемента 1 в сумматор 2 в сигнализаторе 12 сформируется сигнал, который приходит в блок k и отключает привод. Для контроля правильности счи ывания информации с элемента 1 к информации кадого кадра, находящейся в элементе 1, автоматически записывается дополнительная информация, аналогично тому, как это делалось в сумматоре 2. Если после окончания считывания информации с элемента 1 делитель 10 будет находиться не в нулевом состоянии, то в сигнализаторе 12 загорится индикатор, показывающий неправильность считывания информации с элемента 1. В этом случае информацию данного кадра в элементе 1 необходимо переписать. Блок 13 предназначен для контроля выбега суппорта после останова при вода. Команда с датчика 1 приходит на блок 13, предназначенный для допускового контроля, который представляет из себя реверсивный счетчик с переменным модулем счета, который определяется полем допуска. После, останова привода команда с датчика Т устанавливает счетчик блока 13 в исходное состояние, и одновременно на вход реверсивного счетчика в блоке 13 со счетчика 7 приходят счетные импульсы. Если до начала обработки механизмом 5 следующего кадра реверсивный счетчик блока 13 переполнится, что свидетельствует о выходе суппорта за зону допуска, то
в сигнализаторе 12 сформируется сигНгзл, который приходит в блок 4 и запрещает обработку механизмам 5 следующего кадра.
Элемент 15 предназначен для автоматического снижения скорости в конце перемещения механизма 5, с целью повышения точности позиционирования, и представляет из себя управляемый вентиль, через который в определенные 10 моменты времени на вход декад 2,1 сумматора 2 проходит заданное количество импульсов. Число импульсов определяет величину участка замедления. При включении механизма 5 на вход is вались декад 2,1 с выхода 15 приходит, например, 25 импульсов прямого счета. Тогда информация о величине перемещения механизма 5, хранившаяся в декадах 2.1, сместится на 25 единиц. Таким образом, сигнал совпадения фактического положения исполнительно го механизма, определяемого счетчиком 7 и заданного на декадах 2Л, поступит с выхода блока 3 на блок 4 раньше на число импульсов, пришедших с выхода элемента 15 на декады 2.1, Этот сигнал снизит скорость перемеще ния механизма 5 и одновременно с выхода элемента 15 на декады 2,1 придет такое же количество импульсов, как и в первом случае, но уже импуль сов обратного счета, и смещение информации, хранящейся в декадах 2,1, произойдет в другую сторону, т,е, в декадах 2,1 восстановится первоначальная информация, записанная с эле мента 1. При следующем сигнале с выхода блока 3 привод отключится. Сдвиг информации, хранящейся в декадах 2,1, происходит путем подачи на вход одно из них импульса, который или добавляется к тактовым импульсам или запрещает прохождение одного из них, что вызывает сдвиг по фазе выходных импульсов декады в ту или другую сторону, Например, пусть какая-либо из декад сумматора 2 находится в состоянии три (фиг. 2,в) , тогда поступление на ее вход импульса, который запретит прохождение одного из тактовых импульсов (фиг, 2,3), вызовет смещение ее выходных импульсов по фазе на единицу, т,е, декада будет находиться в состоянии два (фиг, 2,и). При поступлении на вход декады импульса, который добавится к тактовым, ее выходные импульсы сместятся по фазе на единицу в другую сторону и будут совпадать с четвертой импульсной последовательностью.
Изменяя количество импульсов с выхода элемента 15, можно перемещать точку снижения скорости,
С целью увеличения точности позиционирования системы, можно ввести несколько ступеней снижения скорости, Для этого, после включения первой ступени снижения скорости, с выхода элемента 15 на декады 2,1 нужно подавать не все импульсы, которые подапервоначально, а только часть ИЗ них, а с включением второй ступени снижения скорости - оставшуюся часть. Хранение информации в элементе 1 систем гюжет осуществляться или на полупроводниковых элементах или на магнитной ленте. Информация с элемента 1 покадрово считывается в сумматор 2, При помощи счетчика 11 можно перезаписать информацию любого из кадров в элементе 1, причем можно перезаписывать не всю кадровую информацию, а только, информацию о величине перемещения механизма 5, с целью введения коррекции на систематические погрешности и на износ режущего инструмента. Запись информации в элемент 1 осуществляется в число-импульсном коде. Информация записывается оператором с клавиатуры для записи напосредственно с чертежа детали. Применение в устройстве счетчика 7 упрощает ее настройку и позволяет быстро и объективно оценивать информацию и оперативно вмешиваться в работу станков во время обработки. Предлагаемое устройство позволяет значительно сократить количество межсхемных соединений, так как о потенциальном состоянии декад судят по временному положению импульсов с одного выхода, а запись и сдвиг информации осуществляются по одному входу. Это повышает надежность устроиства и создает предпосылки для разработки устройства управления станками на основе больших интегральных схем, так как надежность узлов на интегральных схемах мало зависит от их сложности и, в основном, определяется количеством межсхемных соединений, уменьшение которого позволяет увеличить степень интеграции. снизить потребление мощности, упростить технологию изготовления. Формула изобретения Устройство для программного управ ления станком, содержащее последовательно соединенные программно-задающий блок, сумматор, блок совпадения кодов, блок управления, исполнительный механизм, датчик положения и первый счетчик, а также последовател но соединенные датчик момента останова привода, блок сравнения и сигна лизатор отклонения, выход которого через блок управления соединен со бторым и третьим входами сумматора, второй выход которого соединен с трет им входом блока управления, отли чающееся тем, что, с целью повышения надежности устройства, оно содержит первый делитель частоты и последовательно соединенные триггер. 9 1 злемент И, второй делитель частоты и второй счетчик, выход которого соединен со входом программно-задающего блока, второй вход первого делителя частоты соединен с вторым входом второго счетчика, третий вход которого соединен с третьим выходом блока управления, выходы первого счетчика подключены ко второму входу блока сравнения и второму входу блока совпадения кодов, первой и второй входы триггера соединены соответственно с четвертым выходом блока управления и с третьим выходом сумматора, а втоРой вход элемента И подключен кд второму выходу блока управления, четвертый вход сумматора - ко второму выходу программно-задающего блока.Источники информации у принятые во внимание при экспертизе 1.Авторское свидетельство СССР № , кл, G 05 В 19/18, 197. 2.Авторское свидетельство СССР Vf 557353, кл. G 05 В 19/t8, t975.
« JUlяnл шшlяnлJшлnлJlлл
5 j-Jl
Фиг. 2
