Изобретение относится к автоматизации производства и предназначено для использования в гибких производственных системах, робототехнических комплексах, системах группового управления оборудованием.
Известно устройство для программного управления группой станков [1], в котором работающий с разделением времени интерполятор выполняет одновременно несколько команд. При этом усложняется схема устройства, что снижает его надежность.
Наиболее близким к изобретению техническим решением является система группового управления станками [2], содержащая ЭВМ, соединенную с входами коммутатора через интерполяторы, причем выходы коммутатора соединены со станками через устройства станочного управления и с входом устройства записи управляющих программ, которое соединено с входом и выходом устройства доставки управляющих программ и входом и выходом дополнительного коммутатора, который соединен с входами и выходами устройств станочного управления и с входом и выходом устройства управления и сравнения, которое соединено с входом и выходом ЭВМ, с входом и выходом устройства доставки управляющих программ и с входом устройства хранения управляющих программ, которое соединено с входом и выходом устройства доставки управляющих программ.
Недостатками такой системы являются высокая стоимость и низкая надежность из-за большого количества устройств станочного управления, а также ограниченная производительность оборудования.
Целью изобретения является повышение производительности, точности и надежности работы системы за счет предварительного анализа и преобразования пакетов управляющих программ до начала их выполнения на оборудовании и постоянного контроля за правильностью их выполнения в ходе работы.
Цель достигается тем, что в систему программного управления группой единиц технологического оборудования, содержащую устройство задания программы, устройство записи управляющих программ, интерполяторы, выходы которых подключены к коммутатору, введены счетчик программ, устройство синхронизации и управления, блок отображения информации, аналого-цифровые преобразователи (АЦП), дешифратор команды, блок управления, первая N-я единицы оборудования с приводами и датчиками положения рабочих органов, сумматор, цифроаналоговые преобразователи (ЦАП), блок памяти, регистр остановов, блок регистров, при этом первые выходы устройства задания программы подключены к первым входам устройства записи управляющих программ, вторые входы, первые и вторые выходы которого соединены соответственно с выходами регистра остановов, третьими входами блока памяти и входами дешифратора команды, выходы которого соединены с вторыми входами блока памяти и через сумматор с первыми входами блока памяти, четвертые входы и выходы которого соединены соответственно с выходами регистра остановов и входами блока регистров, первые N-е выходы которого соединены с вторыми входами счетчика программ и с вторыми входами первого = N-го интерполяторов, первые и третьи входы которых подключены соответственно к выходам блока сравнения и выходам регистра остановов, выходы интерполяторов соединены с вторыми входами блока сравнения и входами коммутатора, выходы которого соединены с входами ЦАП, выходы которых через приводы, датчики положения рабочих органов первой = N-й единиц оборудования и АЦП соединены с соответствующими первыми входами блока сравнения, выходы которого подключены к входам регистра остановов и четвертым входам блока отображений информации, вторые, третьи, пятые и первые входы которого соединены соответственно с выходами регистра остановов, выходами блока памяти, выходами коммутатора и вторыми выходами счетчика программ, первые выходы и первые входы которого соединены соответственно с входами и вторыми выходами устройства задания программы, а входы и выходы устройства синхронизации и управления соединены со всеми функциональными частями системы. Таким образом, заявленное техническое решение соответствует критерию "новизна".
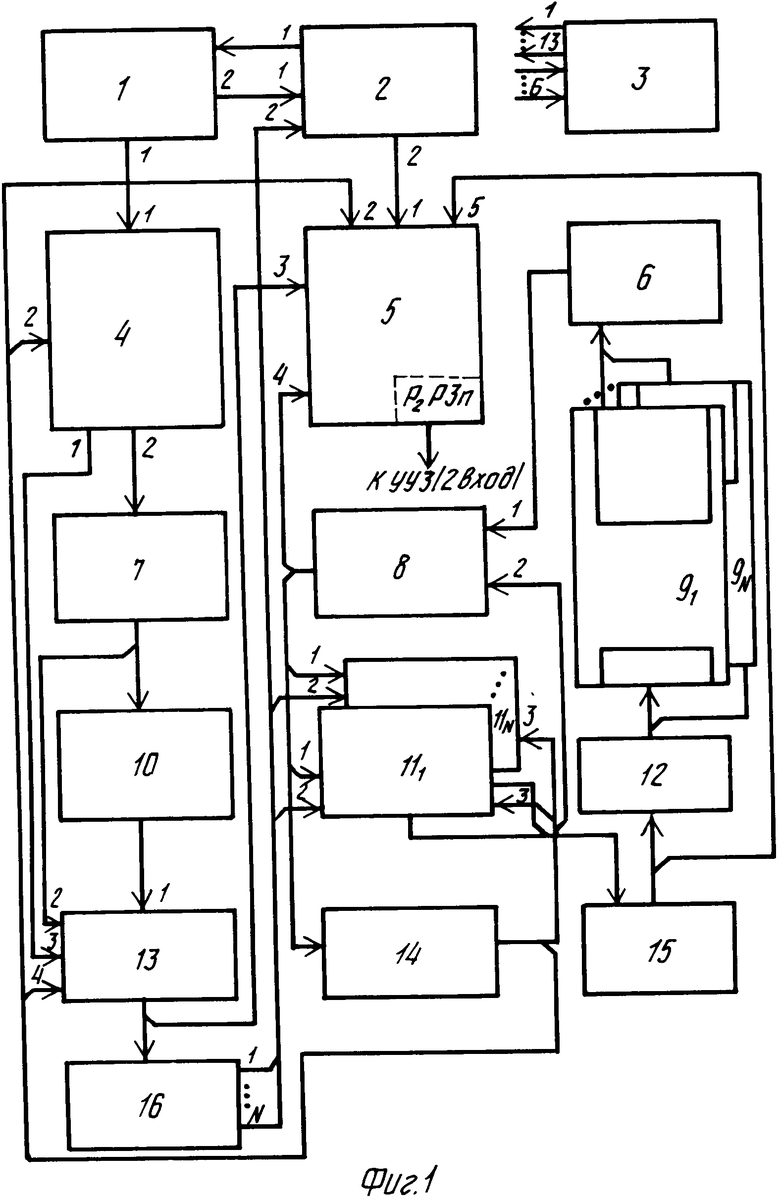
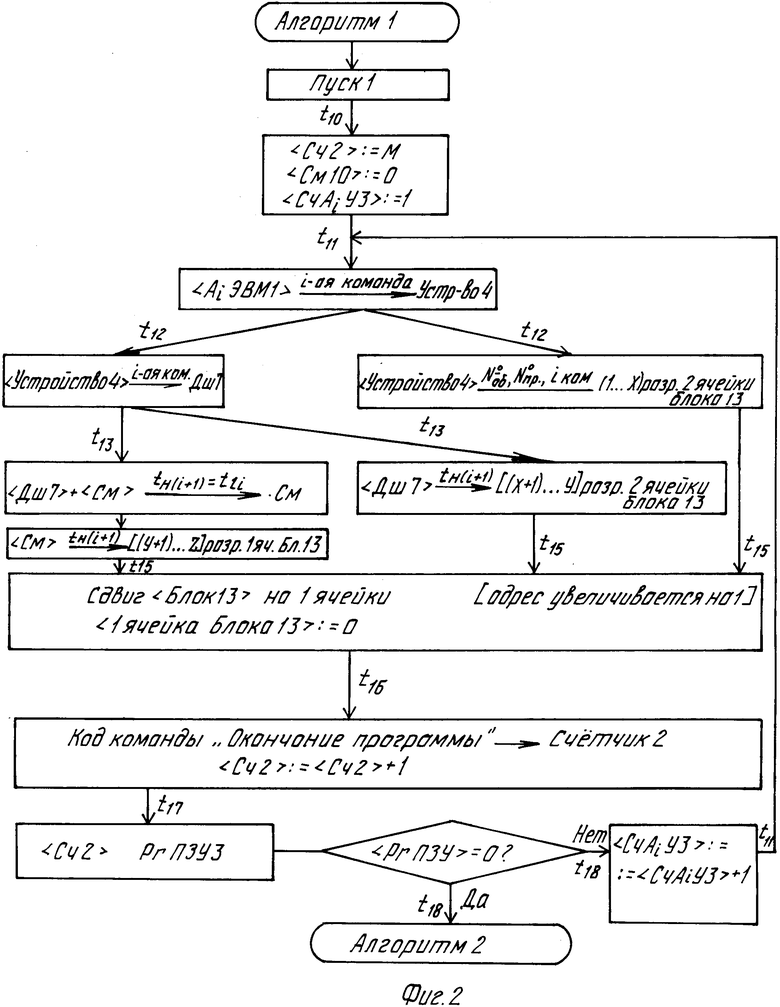
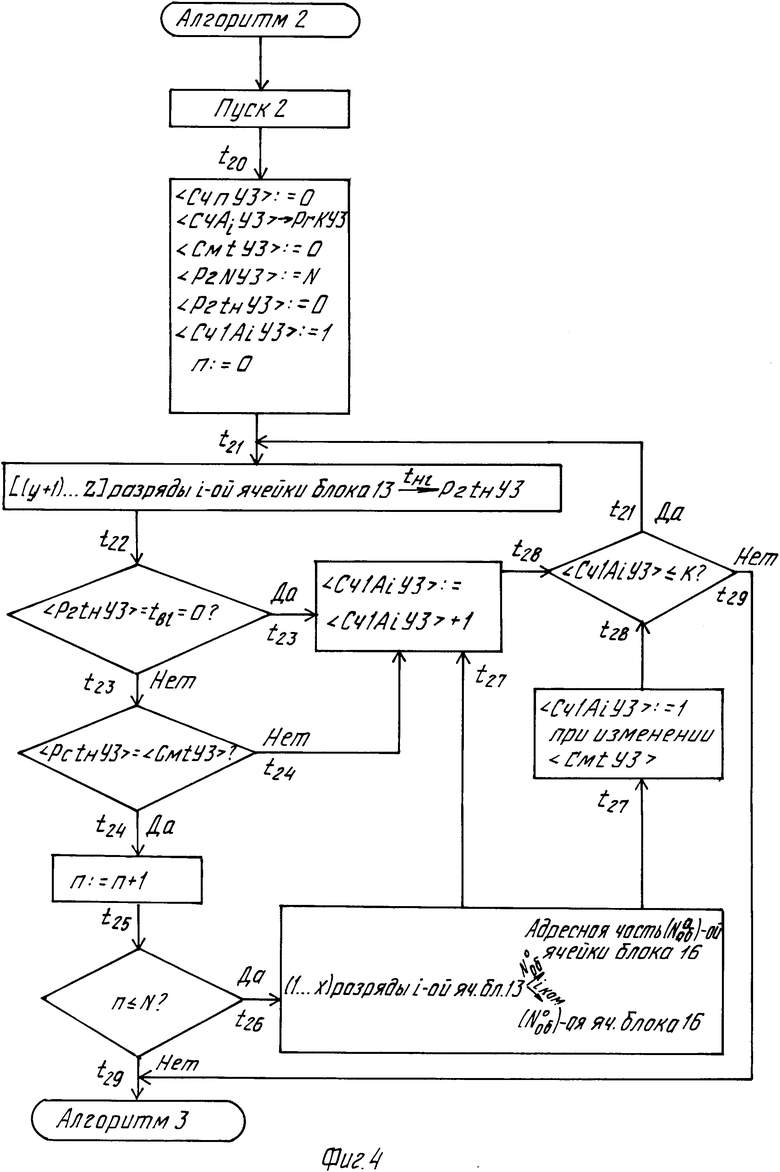
На фиг. 1 представлена структурная электрическая схема системы; на фиг. 2 - алгоритм 1 выработки сигналов управления передачей информации из устройства задания программы в блок памяти; на фиг. 3 - структура ячеек блока памяти; на фиг. 4 - алгоритм 2 записи групп команд из блока памяти в блок регистров; на фиг. 5 - алгоритм 3 передачи команд из блока регистров в интерполяторы; на фиг. 6 и 7 - структурная схема устройства синхронизации и управления.
Система программного управления группой единиц технологического оборудования содержит (фиг. 1) устройство 1 задания программы, счетчик 2 программ, устройство 3 синхронизации и управления, устройство 4 записи управляющих программ, блок 5 отображения информации, АЦП 6, дешифратор 7 команды, блок 8 сравнения, приводы и датчики положения рабочих органов первой = N-й единиц оборудования 91 - 9N, сумматор 10, интерполяторы 111- 11N, ЦАП 12, блок 13 памяти, регистр 14 остановов, коммутатор 15, блок 16 регистров.
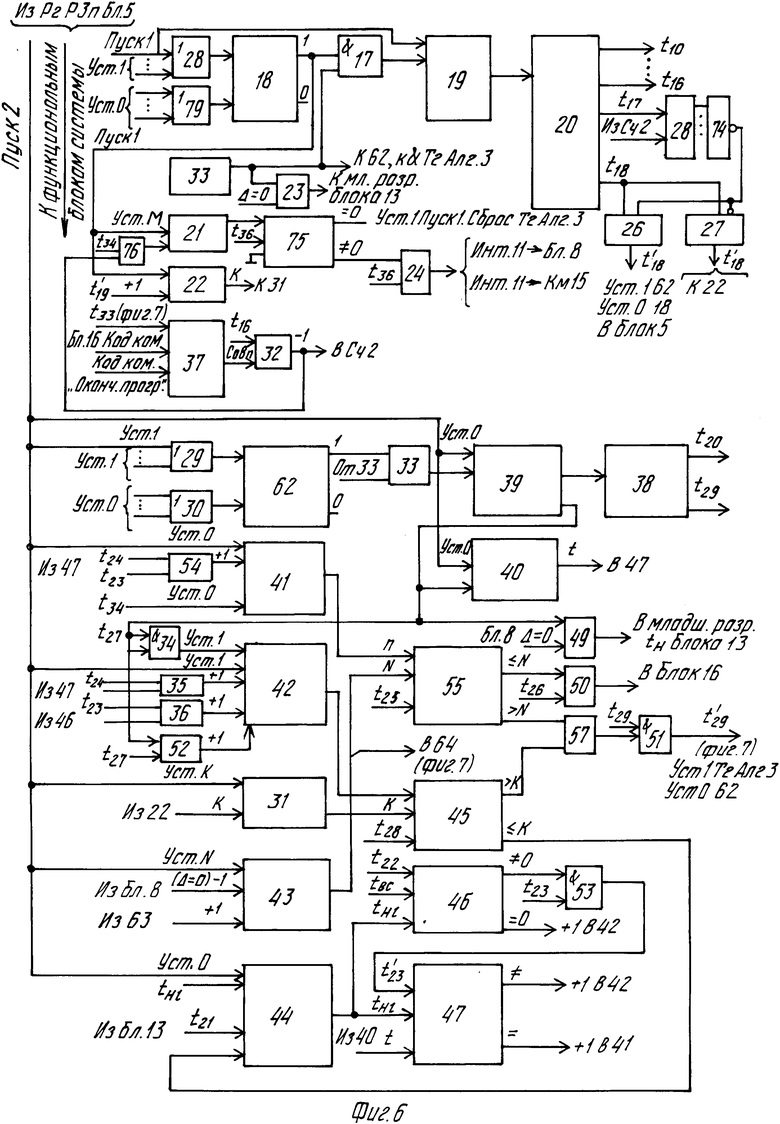
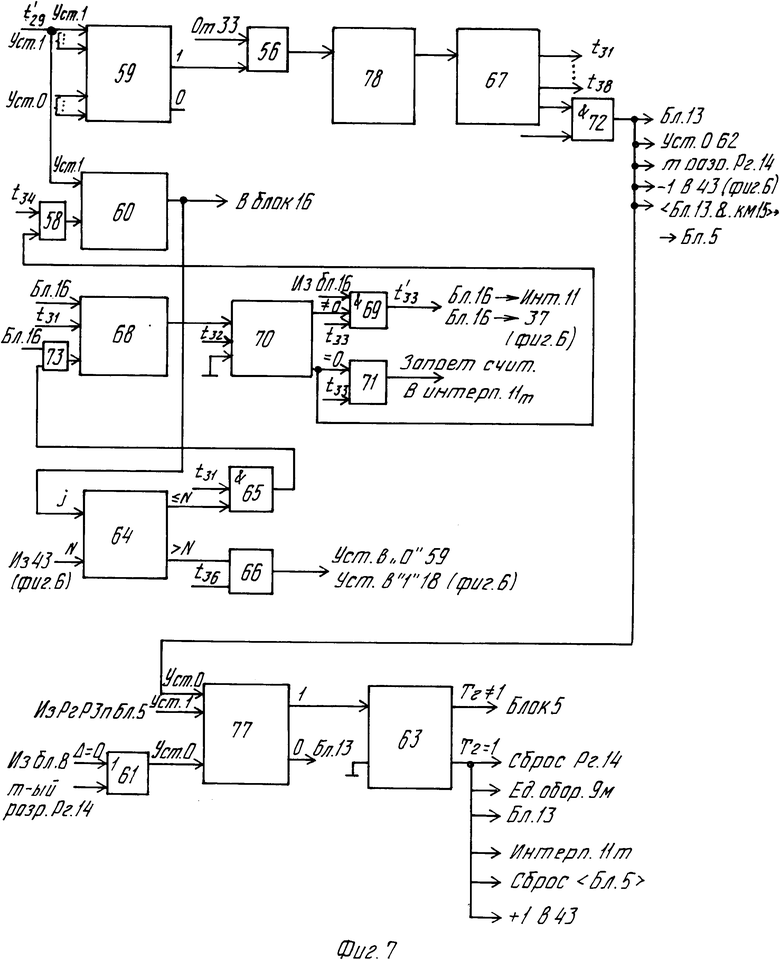
Устройство 3 синхронизации и управления (фиг. 6 и 7) содержит элемент И 17, первый триггер 18 пуска, первый кольцевой счетчик 19, первый дешифратор 20, счетчик 21 программ устройства синхронизации и управления, счетчик 22 адресов, элементы И 23 и 24, регистр 25 числа программ, элементы И 26 и 27, ИЛИ 28, 29 и 30, регистр 31 команд, элемент И 32, генератор 33 импульсов, элементы И 34, 35 и 36, схему 37 совпадения, второй дешифратор 38, второй кольцевой счетчик 39, сумматор 40 реального времени t работы оборудования, счетчик 41 числа n, первый счетчик 42 адресов, регистр 43 числа N, регистр 44 величины tнi, третью схему 45 сравнения, нулевую схему 46 сравнения, первую схему 47 сравнения, элементы И 48 - 54, вторую схему 55 сравнения, элементы И 56, ИЛИ 57, И 58, триггер 59 третьего алгоритма, регистр 60 номера j-й ячейки, элемент ИЛИ 61, триггер 62 второго пуска, седьмую схему 63 сравнения, пятую схему 64 сравнения, элементы И 65 и 66, третий дешифратор 67, регистр 68 адреса j-й ячейки, элемент И 69, четвертую схему 70 сравнения, элементы И 71 - 74, шестую схему 75 сравнения, элемент И 76, триггер 77 третьего пуска, третий кольцевой счетчик 78, элемент ИЛИ 79.
Система программного управления группой единиц технологического оборудования работает следующим образом.
Пакеты программ работы отдельных единиц оборудования (роботов, станков, технологического оборудования и т.п.) записываются в устройство 1 с номером программ и допусками на размеры. По команде оператора (или сигналу устройства 3) программы покомандно записываются из устройства 1 в устройство 4. Каждая команда затем пересылается в дешифратор 7, после которого в ячейку блока 13 записываются команда, теоретическое время ее выполнения и время начала ее выполнения (tнi), номер оборудования, номер программы, причем к времени tнi на сумматоре 10 постоянно прибавляется по единице реального времени для формирования в блоке 13 последовательности выполняемых команд на всех единицах оборудования по времени начала их. После записи программ начинается их выполнение. По команде оператора (или сигналу устройства 3) происходит передача группы команд с одинаковым временем начала их выполнения из блока 13 в блок 16 для последующей передачи их через интерполяторы, коммутаторы и ЦАП к приводам каждой единицы оборудования и на блок 8, где сравниваются допуск и величина разности между теоретическим и практическим размерами на каждой единице оборудования. В случае приближения разности к величине, равной допуску, блок 8 вырабатывает для данной единицы оборудования сигнал в регистр 14, который выдает сигналы останова в соответствующие блоки системы для останавливаемой единицы оборудования, чем предупреждает изготовление брака. При устранении неисправности теоретическое время выполнения команд остановленной единицы оборудования увеличивается в реальном масштабе времени, после устранения неисправности продолжается выполнение команд. Дозапись программ производится по команде устройства 3 после выполнения системой команды "окончание программы" на конкретной единице оборудования.
По команде оператора или сигналу устройства 3 "Пуск 1" с триггера 18 (фиг. 6) устройство 3 начинает последовательно вырабатывать по алгоритму 1 (фиг. 2) управляющие сигналы, разрешающие передачу информации из устройства 1 в устройство 4, причем в алгоритме 1 по сигналу t10 с дешифратора 20 в счетчик 2 и счетчик 21 программ устройства 3 заносится величина М - максимальное число записываемых в блок 13 программ, обнуляется сумматор 10 и заносится "единица" в младший разряд счетчика 22 адресов команд устройства 3, считываемых из устройства 1. Следующий сигнал t11 с дешифратора 20, устройства 3 разрешает передачу i-й команды из Ai-й ячейки устройства 1 в устройство 4, причем для первой команды в пакетах программ i = 1. Сигнал t12 с дешифратора 20 разрешает передачу i-й команды из устройства 4 в дешифратор 7, а NОБo=, Nпрo = и i-й команд из устройства 4 в разряды 1...X второй ячейки блока 13 (фиг. 3). Сигнал t13 с дешифратора 20 разрешает передачу дешифрованной команды из дешифратора 7 в сумматор 10 и суммирование теоретического времени выполнения i-й команды (tBi) исполнительными устройствами с содержимым сумматора 10 (для i = 1 < См10 ≥0), причем величина tH(i+1) равна величине  t
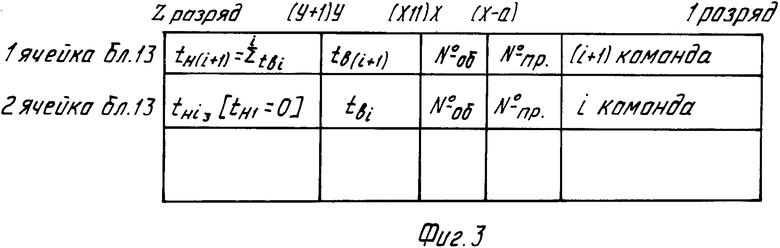
t - сумме теоретических времен работы исполнительных устройств при выполнении команды, а tH1 = 0. Этим же сигналом t13 разрешена передача tн(i+1) из сумматора 10 в разряды (X+1)...Y второй ячейки блока 13. Сигнал t14 с дешифратора 20 разрешает передачу <См10> в разряды (Y+1).. . Z первой ячейки блока 13. Сигнал t15 с дешифратора 20 разрешает сдвиг на одну ячейку содержимого блока 13 (содержимое первой ячейки сдвигается во вторую, второй - в третью и т.д.), при этом первая ячейка блока 13 обнуляется. Сигнал t16 с дешифратора 20 разрешает посылку кода сигнализируемой команды через схему 37 совпадения устройства 3 и элемент И 32 на вычитающий вход счетчика 2, и при совпадении этого кода с кодом команды "окончание программы" содержимое счетчика 2 уменьшается на единицу (при несовпадении кодов состояние счетчика 2 не изменяется). Сигнал t17 с дешифратора 20 пересылает содержимое счетчика 2 в регистр 25 числа программ устройства 3, и при его ненулевом содержимом через элементы И 26 и 27 вырабатывается сигнал для увеличения <СЧ Ai У3> на единицу по сигналу t18 с дешифратора 20 и выборки по сигналу t11 следующей команды для дешифрации и записи ее в блок 13. При нулевом содержимом регистра 25 (запись М программ закончена) сигнал t18 поступает в блок 5 как сигнал "Запрос команды Пуск 2" с индикацией его на блоке 5. Структура ячеек блока 13 памяти приведена на фиг. 3. Разряды (Y+1)...Z ячеек блока 13 являются сумматорами. Для каждой единицы оборудования формирование величины tнi в дешифраторе 7 происходит с нулевого момента времени для первой программы в пакете программ, а для второй и последующих программ - с момента окончания выполнения последней команды в предыдущей программе.
- сумме теоретических времен работы исполнительных устройств при выполнении команды, а tH1 = 0. Этим же сигналом t13 разрешена передача tн(i+1) из сумматора 10 в разряды (X+1)...Y второй ячейки блока 13. Сигнал t14 с дешифратора 20 разрешает передачу <См10> в разряды (Y+1).. . Z первой ячейки блока 13. Сигнал t15 с дешифратора 20 разрешает сдвиг на одну ячейку содержимого блока 13 (содержимое первой ячейки сдвигается во вторую, второй - в третью и т.д.), при этом первая ячейка блока 13 обнуляется. Сигнал t16 с дешифратора 20 разрешает посылку кода сигнализируемой команды через схему 37 совпадения устройства 3 и элемент И 32 на вычитающий вход счетчика 2, и при совпадении этого кода с кодом команды "окончание программы" содержимое счетчика 2 уменьшается на единицу (при несовпадении кодов состояние счетчика 2 не изменяется). Сигнал t17 с дешифратора 20 пересылает содержимое счетчика 2 в регистр 25 числа программ устройства 3, и при его ненулевом содержимом через элементы И 26 и 27 вырабатывается сигнал для увеличения <СЧ Ai У3> на единицу по сигналу t18 с дешифратора 20 и выборки по сигналу t11 следующей команды для дешифрации и записи ее в блок 13. При нулевом содержимом регистра 25 (запись М программ закончена) сигнал t18 поступает в блок 5 как сигнал "Запрос команды Пуск 2" с индикацией его на блоке 5. Структура ячеек блока 13 памяти приведена на фиг. 3. Разряды (Y+1)...Z ячеек блока 13 являются сумматорами. Для каждой единицы оборудования формирование величины tнi в дешифраторе 7 происходит с нулевого момента времени для первой программы в пакете программ, а для второй и последующих программ - с момента окончания выполнения последней команды в предыдущей программе.
Формирование нового адреса для записи его с i-й команды в блок 13 происходит из времени tнi, номера единицы оборудования и номера программы. Таким образом, формирование команд с новыми адресами в блоке 13 происходит до начала работы исполнительных устройств, причем номер программы заносится для ускорения диагностики системы.
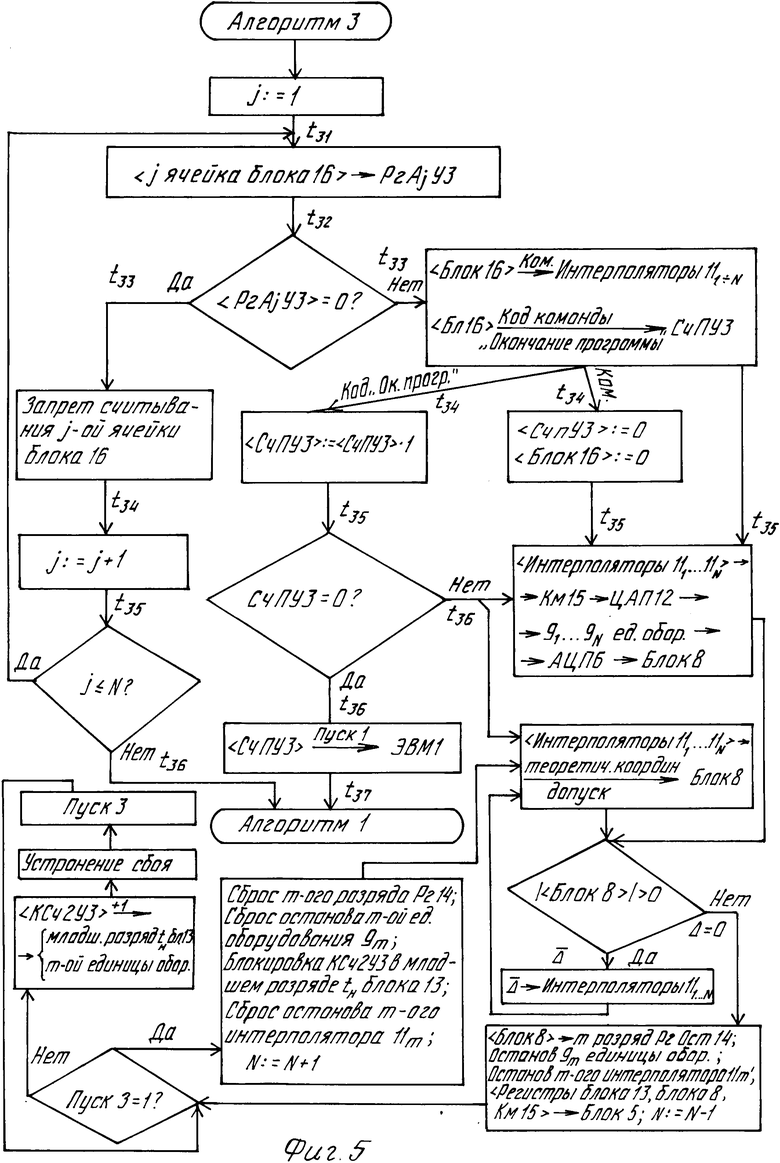
Для начала работы всех единиц оборудования 91...9N по команде "Пуск 2" с триггера 62, подаваемой оператором или системой на устройство 3, последовательно опрашивает блок 13 (время опроса всех ячеек блока 13 меньше разницы tн(i+1) - tнi для любой команды) и записывает из блока 13 в блок 16 группы команд с одинаковым временем начала их выполнения по алгоритму 2 (фиг. 4). По сигналу "Пуск 2" (сигнал t20 с дешифратора 38 устройства 3 или сигнал регистра ручной записи блока 5) обнуляются входящие в устройство 3 счетчик 41 числа n записанных в блоке 16 ячеек и сумматор 40 реального времени t работы оборудования, суммирующий по одной единице времени от кольцевого счетчика 39 устройства 3. При этом содержимое счетчика 22, равное K, пересылается в регистр 31 команд устройства 3, устанавливается в единицу счетчик 42, устанавливается величина N в регистре 43 числа N работающих единиц оборудования устройства 3, обнуляется регистр 44 величины tнi устройства 3, сбрасывается в ноль триггер 18 "Пуск 1" устройства 3. Следующий сигнал t21 с дешифратора 38 разрешает передачу величины tH из разрядов (Y+1)...Z i-й ячейки блока 13 в регистр 44, причем адрес i-й ячейки равен единице для первого опроса (при t23) блока 13 с последующим увеличением адреса в счетчике 42 в следующих циклах. При ненулевом значении сравниваемых по сигналу t22 с дешифратора 38 величин tHe из регистра 44 и tBe из блока 13 (ячейка с командой) со схемы 46 сравнения устройства 3 поступает сигнал разрешения сравнения величин теоретического времени tHe из регистра 44 и реального времени t из сумматора 40 по сигналу t23' с элемента И 53. При несравнении теоретического времени начала выполнения команды tHe и реального времени t работы схема 47 сравнения устройства 3 разрешает увеличение через элемент И 35 по сигналу t24 с дешифратора 38 адреса блока 13 в счетчик 42 с последующим сравнением по сигналу t28 с дешифратора 38 на схеме 45 сравнения устройства 3 записанных к моменту t28 команд из счетчика 42 и общего числа команд K из регистра 31. Цикл считывания и анализа следующей ячейки блока 13 продолжается при условии <Сч 1Ai ˙ У3> ≅K по сигналу схемы 45 сравнения при t21 дешифратора 38. При сравнении по сигналу t23' с элемента И 53 теоретического (tHe) и реального (t) времени схема 47 сравнения по сигналу t24 с дешифратора 38 через элемент И 54 увеличивает число n в счетчике 41 и по сигналу t25 с дешифратора 38 сравнивает в схеме 55 сравнения величину n с числом N ячеек блока 16 (каждая ячейка блока 16 физически связана с соответствующим интерполятором: первая ячейка - с первым интерполятором, вторая - с вторым и т.д.). При n ≅ N схема 55 сравнения по сигналу t26 с дешифратора 38 разрешает через элемент И 50 передачу (Nоб) из i-й ячейки блока 13 как адрес ячейки блока 16, а саму команду - в Nоб-ю ячейку блока 16. Сигнал кольцевого счетчика 39 устройства 3, увеличивающий <См t У3> (поз. 40) на единицу, по сигналу t27 дешифратора 38 через элемент И 34 сбрасывает счетчик 42 в единицу (цикл опроса ячеек блока 13 за один отрезок реального времени t окончен). При неизменности <См t У3> (поз. 40) счетчик 42 не сбрасывается и увеличивается на единицу через элемент И 52 по сигналу t27 с дешифратора 38 (цикл опроса ячеек блока 13 не окончен для данного момента реального времени t). Сигнал t28 с дешифратора 38 разрешает сравнение <Сч 1Ai У3> (поз. 42) с числом K записанных в блоке 13 команд и при Сч 1Ai У3> (поз. 42), большем K, схема 45 сравнения при t29 с дешифратора 38 переходит к алгоритму 3 - устанавливает в единицу триггер 59 (фиг. 7) с установкой в ноль триггера 62. Такой же сигнал перехода к алгоритму 3 (фиг. 5) вырабатывается на схеме 55 сравнения при n > >N, при этом устанавливается в ноль триггер 62 и в единицу <Рг j У3>=j регистр 60 номера j-й ячейки блока 16. Следующий сигнал t31 с дешифратора 67 разрешает передачу содержимого j-й ячейки блока 16 в регистр 68 устройства 3 для сравнения по сигналу t32 с дешифратора 67 <Рг Ai У3> (поз. 68) с нулем в схеме 70 сравнения (проверка наличия команды). При <Рг Aj У3> ≠ 0 (наличие команды в момент t в блоке 16) схема 70 сравнения по сигналу t33 с дешифратора 67 через элемент И 69 передает команды из всех ячеек блока 16 в соответствующие интерполяторы 111... 11N, а каждый код команды "окончание программы" через схему 37 совпадения кодов устройства 3 в счетчик 21 программ устройства 3 для вычитания единицы по сигналу t34 с дешифратора 67 по окончании выполнения каждой программы. При <Рг Aj У3> = 0 (поз. 68) в момент t33 с дешифратора 67 вырабатывается через элемент И 71 сигнал "Запрет считывания" ячейки блока 16 в соответствующий интерполятор 11 для блокирования его обнуления при выполнении предыдущей команды более чем за один отрезок реального времени t. Сигнал t34 с дешифратора 67 увеличивает на единицу адрес j-й ячейки блока 16. По сигналу t35 с дешифратора 67 сравниваются величины j и N на схеме 64 сравнения. При j ≅N схема 64 сравнения пересылает по сигналу t31 через элементы И 65, 73 следующую по циклу ячейку блока 16 в регистр 68. При j > N (команды в блоке 16 отсутствуют) схема 64 сравнения вырабатывает сигнал t36 с дешифратора 67 через элемент И 66 - перехода к алгоритму 1. После считывания из блока 16 команд и кода "Окончание программы" (при его наличии) сигнал t34 с дешифратора 67 устанавливает счетчик 41 и блок 16 в исходные нулевые состояния для нового цикла записи, а код "Окончание программы" по сигналу t34 с дешифратора 67 уменьшает <Сч П У3> (поз. 21) на единицу с последующим анализом по сигналу t36 с дешифратора 67 <Сч П У3> (поз. 21) на ноль в схеме 75 сравнения. При <Сч П У3> = 0 (поз. 21) (все программы выполнены) по сигналу схема 75 сравнения вырабатывает сигналы "Пуск 1", сброс триггера 59 алгоритма 3 устройства 3 и по сигналу t37 с дешифратора 67 управление передается алгоритму 1. При <СчПУ3> ≠ 0 (поз. 21) схема 75 сравнения разрешает через элемент И 24 по сигналу t36 с дешифратора 67 передачу из интерполяторов 11 теоретических координат в блок 8 и реальных координат через коммутатор 15, ЦАП 12, единицы оборудования 91...9N, АЦП 6 в блок 8. В результате сравнения в блоке 8 теоретического допуска с разницей теоретического и текущего размеров получается величина Δ , инверсия которой ( Δ) используется затем для коррекции соответствующего размера в интерполяторе 11. При Δ = 0 сигнал останова поступает на соответствующую m-ю единицу оборудования, останавливая ее, на интерполятор 11m для запрещения выдачи сигналов (запрещение выполнения команд) на останавливаемые исполнительные устройства, а в устройство 4, блок 13, интерполятор 11 для блокирования записи и считывания команд останавливаемого оборудования в устройстве 4, блоке 13, интерполяторе 11m. Сигнал останова также поступает в блок 13 и блок 16 для наращивания по алгоритму 3 времени начала выполнения команд, относящихся к останавливаемой единице оборудования. Состояние регистров отображается в блоке 5 по сигналу Δ = 0 (для остановленного оборудования).
В период устранения сбоя по сигналу блока 8 Δ = 0 при t38кольцевой счетчик 39 (фиг. 6) начинает увеличивать время tн во всех остановленных программах блока 13 для m-й единицы оборудования с установкой сигнала "Пуск-2" в ноль и устанавливает в единицу m-й разряд регистра 14 остановов который останавливает единицу оборудования 9m и m-й интерполятор, пересылает содержимое регистров блока 13, блока 8, коммутатора 15 для 9m-единицы оборудования в блок 5 с целью ускорения диагностики, уменьшает на единицу величину работающих единиц оборудования. Для запуска в работу m-й единицы оборудования после устранения сбоя сигнал регистра "Пуск 2", посылаемый оператором с пульта управления на блок 5, сбрасывает единицу в m-м разряде регистра 14 остановов, увеличивает N на единицу, отменяет сигналы сброса останова интерполятора 11m и единицы оборудования 9m, блокирует сигналы счетчика 39 в младшие разряды tн блока 13 и передает управление в блок 8. Для улучшения диагностики системы в блоке 5 используется регистр ручной записи адресов и команд (Рг Р3п) по все функциональные части системы.
Устройство 3 синхронизации и управления 3 работает следующим образом.
По сигналу "Пуск 1" из Рг Р3п блока 5 триггер 18 устанавливается через элемент ИЛИ 28 в единицу, триггер 62 через элемент ИЛИ 30 и триггер алгоритма 3 (поз. 59) - в ноль и разрешается передача импульсов от генератора 33 импульсов устройства 3 через элемент И 17 в кольцевой счетчик 19, сбрасываемый в ноль до начала счета сигналом "Пуск 1" и обеспечивающий кольцевой счет. Сигналы кольцевого счетчика 19 поступают на дешифратор 20 устройства 3, который посылает управляющие сигналы t10- t18 в блоки соответственно алгоритму 1. Сигнал "Пуск 2" сбрасывает через элемент ИЛИ 79 триггер 18 и устанавливает через элемент ИЛИ 29 в единицу триггер 62, разрешая работу кольцевого счетчика 39, подающего импульсы на сумматор 40 реального времени и на дешифратор 38. Последний вырабатывает управляющие импульсы t20 - t29 в соответствии с алгоритмом 2. По сигналу от элементов ИЛИ 57, И 51 t29' установки в единицу триггера 59 алгоритма 3 устанавливается в ноль триггер 62 и начинает работать через элемент И 56 кольцевой счетчик 78, передающий сигналы в дешифратор 67. Управляющие сигналы дешифратора 67 поступают в блоки системы в соответствии с алгоритмом 3. В режиме сбоя m-й единицы оборудования (сигнал на элементы И 72 и ИЛИ 61 из блока 8 Δ = 0) возврат ее в рабочее состояние происходит по сигналу от триггера 77 и схемы 63 сравнения устройства 3, определяющей состояние триггера 77 и при <Тг Пуск 3 У3> = 1 разрешающей продолжение работы системы. При <Тг Пуск 3 У3> ≠ 1 информация о сбое выводится на блок 5 отображения и увеличивается величина tн в блоке 13 (+1 из сумматора 40). Начальные установки устройства 3 синхронизации и управления и других функциональных блоков системы производятся в соответствии с алгоритмами 1, 2, 3 и при включении системы в работу.
Система программного управления группой единиц технологического оборудования является экономически более эффективной по сравнению с прототипом, так как в последнем группа из N станков содержит N устройств станочного управления, а в системе одного устройство числового программного управления на группу оборудования. Останов отдельных программ в системе до достижения границ допуска позволяет устранить брак при изготовлении деталей (отработке техпроцесса) и лишь задерживает окончание рабочего цикла на время ремонта или в случае дублирования системы на время переключения систем или отдельных неисправных блоков, т.е. позволяет значительно увеличить время бездефектной работы - надежность системы. Выработка системой сигнала дополнительной загрузки программ увеличивает производительность работы оборудования, практически исключая его простои путем предварительного (до начала работы оборудования по программам) формирования общей очереди команд.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1986 |
|
SU1397878A1 |
| Устройство для задания программы | 1979 |
|
SU862118A1 |
| Мультипроцессорная система | 1983 |
|
SU1156088A1 |
| Устройство для фиксации трассы выполнения программы | 1983 |
|
SU1136170A1 |
| Устройство стабилизации скорости резания для токарно-винтовых станков с числовым программным управлением | 1983 |
|
SU1180845A1 |
| Устройство для централизованного управления вычислительной системой | 1985 |
|
SU1259261A1 |
| Устройство для воспроизведения полиномов | 1980 |
|
SU930321A1 |
| Устройство для моделирования дискретных систем | 1985 |
|
SU1295411A1 |
| Устройство для поиска информации в памяти | 1985 |
|
SU1352494A1 |
| Устройство для управления и микродиагностики | 1981 |
|
SU968815A1 |
Изобретение относится к автоматизации производства и позволяет решить задачу повышения производительности, точности и надежности работы группы технологического оборудования с числовым программным управлением. Пакеты управляющих программ, поступающие из устройства задания программ, преобразуются и анализируются устройством записи, дешифратором, сумматором и записываются в блок памяти с реальным временем начала выполнения команд и добавлением к адресной части номера программы в пакете и номера единицы оборудования, для которого предназначена данная команда. Команды с одинаковым временем начала выбираются в блок регистров и посредством интерполяторов, коммутатора управляют приводами соответствующих единиц оборудования. Значения теоретических координат рабочих органов, выполняющих команды, и текущих реальных координат сравнивают и с учетом допусков блок сравнения вырабатывает сигналы коррекции на соответствующие интерполяторы, а регистр остановов вырабатывает сигнал останова единицы оборудования, рабочий орган которого приближается к границе заданного в программе допуска. 7 ил.
СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ ГРУППОЙ ЕДИНИЦ ТЕХНОЛОГИЧЕСКОГО ОБОРУДОВАНИЯ, содержащая устройство записи управляющих программ, коммутатор, по числу единиц оборудования интерполяторы, устройство синхронизации и управления и устройство задания программы, группа информационных выходов которого соединена с группой информационных входов устройства записи управляющих программ, информационные и управляющие выходы интерполяторов подключены к соответствующим входам коммутатора, отличающаяся тем, что в нее введены счетчик программ, блок отображения информации, дешифратор команд, блок сравнения, сумматор, блок памяти программ, регистр остановов, блок регистров, цифроаналоговые преобразователи и аналого-цифровые преобразователи по числу единиц оборудования, выход каждого из датчиков положения рабочих органов единиц оборудования соединен с входом соответствующего аналого-цифрового преобразователя, выход которого подключен к соответствующему входу первой группы блока сравнения, вторая группа входов которого соединена с соответствующим выходом соответствующего интерполятора, выход блока сравнения соединен с входом регистра остановов и с четвертым входом блока отображения информации, второй вход которого соединен с выходом регистра остановов, третий вход - с выходом блока памяти, первый вход - с вторым выходом счетчика программ, а пятый вход блока отображения информации - с выходом коммутатора и с входом соответствующего цифроаналогового преобразователя, первый вход каждого интерполятора соединен с выходом блока сравнения, второй вход - с соответствующим выходом блока регистров, информационный вход которого соединен с информационным выходом блока памяти, первым входом подключенного к выходу сумматора, вторым входом - к выходу дешифратора команды, третьим входом - к первому выходу устройства записи управляющих программ, четвертым входом - к выходу регистра остановов, второй выход устройства записи управляющих программ соединен через дешифратор команды с входом сумматора, при этом устройство синхронизации и управления первым выходом подключено к входу устройства задания программы, вторым выходом - к второму входу счетчика программ, третий выход устройства синхронизации и управления соединен с первым входом устройства записи управляющих программ, четвертый выход - с вторым входом блока отображения информации, пятый выход - с входом дешифратора команды, шестой выход - с первой группой входов блока сравнения, седьмой выход подключен к входу приводов соответствующих единиц оборудования, восьмой выход - к второму входу сумматора, девятый выход - к третьему входу каждого интерполятора, десятый выход - к первому входу блока памяти, а одиннадцатый - тринадцатый входы соединены соответственно с входами регистра остановов, коммутатора и блока регистров, при этом первый вход устройства синхронизации и управления соединен с вторым выходом счетчика программ, второй вход - с выходом блока отображения информации, третий вход - с выходом блока сравнения, четвертый вход - с выходом блока памяти, пятый вход - с выходом регистра остановов, а группа входов - с соответствующим выходом блока регистров.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Система группового управления станками | 1976 |
|
SU601664A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
