I
Изобретение относится к электротехнике, а более конкретно к синхронным машинам и устройствам их зашиты от асинхронного хода.
Известна зашита синхронной машины от асинхронного хода, основанная на из- мерении угла нагрузки (S между вектором ЭДС холостого хода Ед и напряжением статорной обмотки с помошью специаль ного электромеханического устройства. При превышении максимального допуститмого значения угла (обычно 150-170°) синхронная машина опутючается l .
Недостаток этой защиты от асинхронного хода в том, что изменение угла S осуществляется специальным электромеханическим устройством, связанным с валом двигателя, что в ряде случаев весьма, затрудняет реализацию данного способа зашиты.
Известна зашита синхронного двигателя от асинхронного хода, основанная на выделении переменной составляющей в токе возбуждения и сравнения ее с заданной установкой . Эта зашита реализуется на статистических элементах, что расширяет возможности его применения 2.
Однако эта защита может приводить к ложным срабатываниям при резкопер менной нагрузке, синхронных , действии автоматического регулятора возбуждения и других возмущениях, вызывающих изменение тока возбуждения.
10 Недостатком её является также сложность настройки и обеспечение необходимой чувствительности.
Наиболее близким к предлагаемому
15 по технической сущности является устройство для защиты синхронной машины от асинхронного хода, основанное на выделении переменной составляющей тока в обмотке возбуждения и сравнении ее с
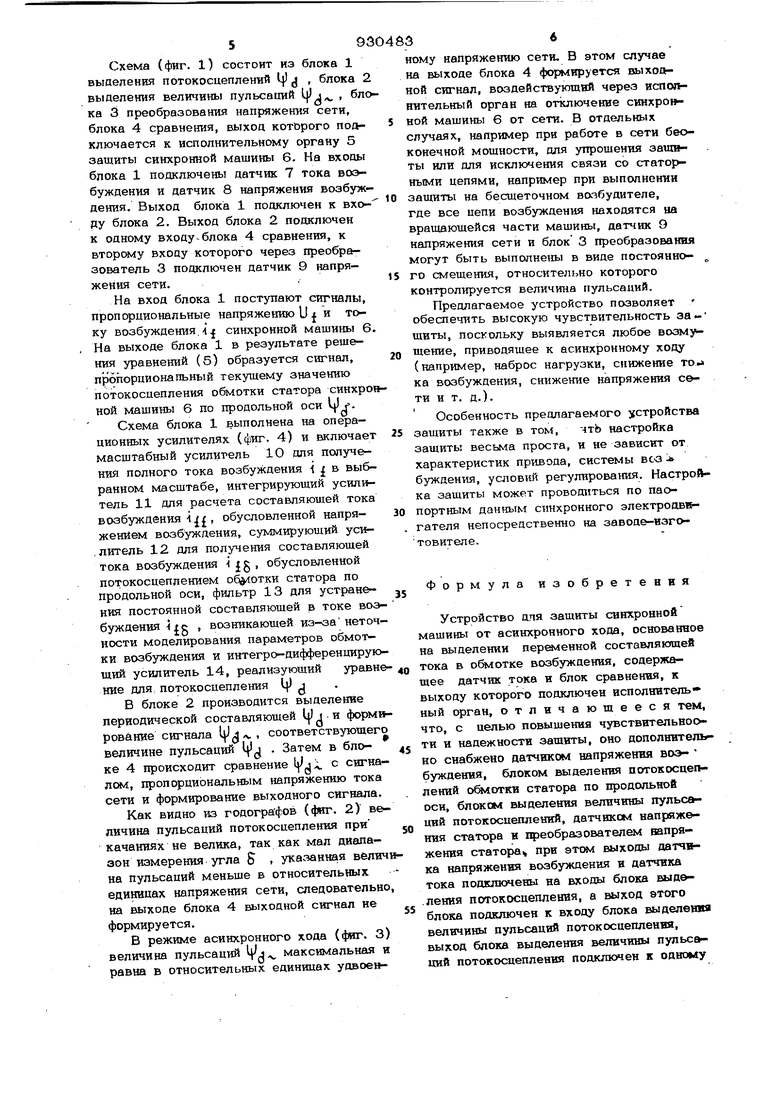
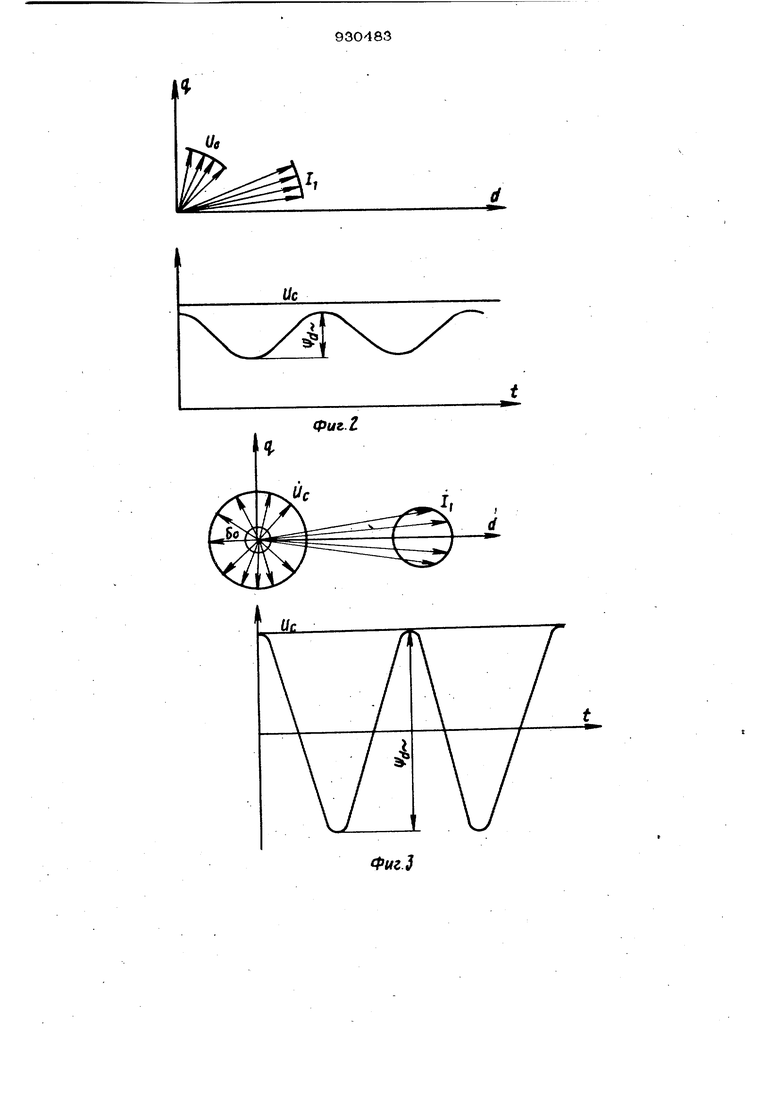
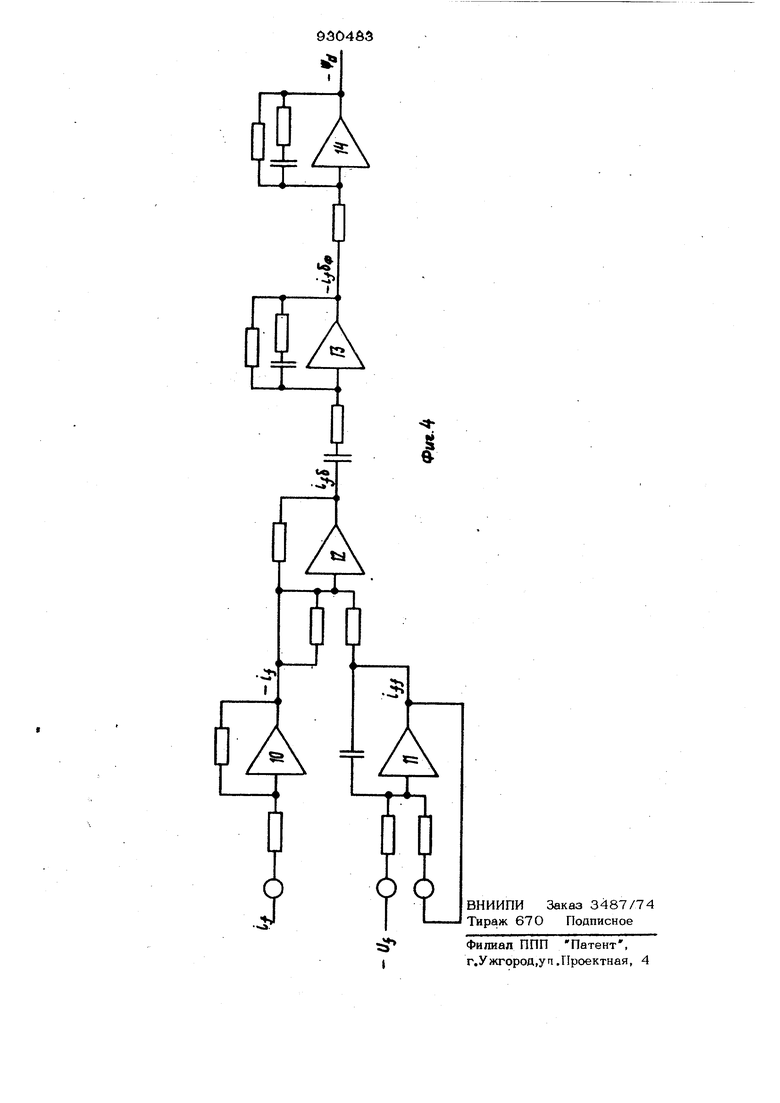
20 уставкой, зависящей от тока возбуждения содержащее датчик тока и блок сравнения, к выходу которого подключен исполнительный орган f ЗЗ. Известная зашита обеспечивает более надежную работу при резкопеременной нпгрузке. Огишко в известном устройстве зЙЛиит при его реализации требуется настройка защиты под индивидуальные характеристи ки двигателя, системы возбуждения и привода. Кроме того, эта защита не,может долго работать при изменении напряжени сети, поскольку нарушается настройка схемы защиты. Цель изобретения - повышение чувствительности защиты и надежности ее ра боты. Поставленная цель достигается тем, что устройство дополнительно снабжено датчиком напряжения возбуждения, бло- . ком выделения потока сцепления обмотки статора по продольной оси, блоком выделения величины пульсаций потокосцеп- лений, датчиком напряжения статора и преобразователем напряжения статора, при этом выходы датчика напряжения возбуждения и датчика тока подключены на входы блока выделения потокосцепле- ния, а выход этого блока подключен к входу блока выделения величины пульсаций потокосцепления, выход блока выдел ния величины пульсаций потокосцепления Подключен к одному входу блока сравнения, а к второму входу этого блока через преобразователь напряжения подключен выход датчика напряжения статора. На фиг. 1 дана функциональная схвма устройства; на фиг. °2 - годографы (концы векторов) напряжения и тока ста тора двигателя, работающего в режиме синхронных качаний, на фиг. 3 - аналоги ная годографа двигателя при работе в то же сети в асинхронном режиме, на фиг. принципиальная схема блока выделения потокосцепления обмотки статора по про дольной оси. .. Из теории электрических машин из.вестно, что потокосцепление обмоТки ста тора по продольной оси приближенно опр деляется проекцией вектора напряжения на поперечную ось машины, которая, в свою очередь, является функцией рабочег угла в соответствие с выражением: .,..cosg,.(, При асинхронном ходе проекции вектора напряжения сети и g to ксыплексной плоскости совершает полный оборот и, следовательно, величина пульсаций тэток саеплевияф в этом режиме будет максимальна и равна в относительных единицах удвоенному напряжению сети U(. В режимах с сохранением синхронной работы, например при качаниях ротора, амплитуда пульсаций Ц .всегда будет меньше ф. Достаточным критерием выпадения синхронной машины их синхронизма будет неравенство (2) U Vdnia,, т Н I/К Зап(2) где К, - коэффициент запаса (нескольгко больше 1,0). значение потокосцепления Ц1 i можно определить по дополнительной составляющей тока возбуждения i tct , поя&ляюшейся в результате измек ения этого потокосцепления. Исходя из |)ещеш1я системы уравнения синхронной машины для продольной оси, ток возбуждения с учетом допущений, что Т. равен XddPVd i(.) )(3) Второе слагаемое в этом уравнении представляет собой .дополнительную соо:гавляющую тока в обмотке возбуждения JW2if (4) В соответствии с (3 и 4) пoтoкocцeп пение обмотки статора по продольной сх:и легко определяется из системы уравнений (5) .Uj 4d 44f u..Usl, , . « adР(5) где ill - ток, обусловленный напряжением возбуждения , 1 / - полный ток обмоток возбуждения;и/ - напряжение возбуждения; ff - активное сопротивление обмотI ки возбуждения, Т ( - переходная постоянная обмотка возбуждения, Xj - синхронное сопротивление по ocHd , Xgj- сопротивление реакции якоря по оси d Реализация математических и логических операций осуществляется предлагав-, мым устройством. Схема (фиг. 1) состоит из блока 1 выделения потокосцеплений Ц) j , блока 2 выделения величины пульсаций Цj, . бло ка 3 преобразования напряжения сети, блока 4 сравнения, выход которого подключается к исполнительному органу 5 защиты синхронной машины 6. На входы блока 1 подключены датчик 7 тока возбуждения и датчик 8 напряжения возбуж дения. Выход блока 1 подключен к входу блока 2. Выход блока 2 подключен к одному входу-блока 4 сравнения, к второму входу которого через преобразователь 3 подключен датчик 9 напряжения сети. На вход блока 1 поступают сигналы, пропорциональные напряжению U i и току возбуждения.-i синхронной машины 6 На выходе блока 1 в результате решения уравнений (5) образуется сигнал, пропорционапьный текущему значению потокосцепления обмотки статора синхрон ной машины 6 по продольной оси Ц f Схема блока 1 выполнена на операционных усилителях (фиг. 4) и включает масштабный усилитель 10 для получения полного тока возбуждения i в выбранном масштабе, интегрирующий усилитель 11 для расчета составляющей тока возбуждения i , обусловленной напряженйем возбуждения, суммирующий уси.литель 12 для получения составляющей тока возбуждения § , обусловленной потокосцеплением обмотки статора по продольной оси, фильтр 13 для устранения постоянной составляющей в токе воз бyждeния lg , возникающей из-занеточ ности моделирования параметров обмогки возбуждения и интегро-дифферениирую щий усилитель 14, реализующий уравн ние для потокосцепления Ц j В блоке 2 производится выделение периодической составляющей Цл-и форм ровАние сигнала l J/l-v . соответствующег величине пульсаций Ц) . Затем в блоке 4 происходит сравнение с сигналом, пропорциональным напряжению тока сети и формирование выходного сигнала. Как видно из годографов (4яг. 2) ве личина пульсаций потокосцепления при качаниях не велика, так как мал диапазон измерения утла 5 . yкav aннaя велич на пульсаций меньше в относительных единицах напряжения сети, следовательно на выходе блока 4 выходной сигнал не формируется. В режиме асинхронного хода (фиг. 3 величина пульсаций максимальная и равна в относительных единицах удвоенному напряжению сети. В этом случае на выходе блока 4 формируется выхо ьной сигнал, воздействующий через исполнительный орган на отключение синхро ной машины 6 от сети. В отдельных случаях, например при работе в сети беоконечной мощности, для упрощения зашиты или для исключения связи со статорнными цепями, например при выполнении защиты на бесщеточном возбудителе, где все цепи возбуждения находятся на вращающейся части машины, датчик 9 напряжения сети и блок 3 преобразования могут быть выполнены в виде постоянного смещения, относительно которого контролируется величина пульсаций. Предлагаемое устройство позволяет обеспечить высокую чувствительность защиты, поскольку выявляется любое возм)щение, приводящее к асинхронному ходу (например, наброс нагрузки, снижение то j ка возбуждения, снижение напряжения с&ти н т. д.). Особенность предлагаемого устройства защиты также в том, чтЬ настройка защиты весьма проста, и не зависит от характеристик привода, системы всо j буждения, условш регулирования. Настройка защиты может проводиться по паопортным данным синхронного электродвигателя непосредственно на заводе-изг1 товителе. Формула изобретения Устройство для защиты синхронной машины от асинхронного хода, основанное на выделении пер«ленной составляющей тока в обмотке возбуждения, содержащее датчик тока и блок сравнения, к выходу которого подключен исполнитель ный орган, отличающееся тем, что, с целью повышения чувстввтельнооти и надежности защиты, оно дополнительно снабжено датчиком напряжения воэбуждения, блоком выделения потокосцеплений обмотки статора по продольной оси, блоком выделения величины пульсаций потокосцеплений, датчиком напряжения статора и преобразователем напряжения статора, при эттел выходы датчика напряжения возбуждения и датчика тока подключены на входы блока выдв.лення потокосцепления, а выход этого блока подключен к входу блока выделения величины пульсаций потокосцепления, выход блока выделения величины пульсаций потокосцеплення подключен к одному
входу блока сравнения, а к второму вхоау этого блока через преобразователь нешряжения пооключен выход датчика напряжения статора.
Источники информации,
принятые во внимание при экспертизе
.1. Патент Франции (В) № 2О07228, МПК Н02Н 7/ОО, 1976.
2.Слодарж М.И. Режимы работы, релейная защита и автоматика синхронных электродвигатели, М,, Энергия, 1977, с. 166.
3.Авторское свидетельство СССР № 273814, кл. Н О2 Н 7/08. 1973 (прототип).


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для возбуждения синхронного двигателя | 1983 |
|
SU1119148A1 |
| Электропривод переменного тока | 1984 |
|
SU1515322A1 |
| Способ регулирования возбуждения асинхронизированной синхронной машины и устройство для его осуществления | 1991 |
|
SU1838871A3 |
| Электропривод с векторным управлением | 1985 |
|
SU1292153A1 |
| Устройство для частного управленияэлЕКТРОпРиВОдОМ пЕРЕМЕННОгО TOKA | 1978 |
|
SU794701A1 |
| Автономная система электрооборудования с вентильным электродвигателем | 1987 |
|
SU1534662A1 |
| Вентильный электропривод | 1983 |
|
SU1234940A1 |
| Электропривод переменного тока | 1990 |
|
SU1750015A1 |
| СПОСОБ ПУСКА СИНХРОННЫХ МАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2096902C1 |
| Устройство для возбуждения синхронного двигателя | 1985 |
|
SU1334331A1 |
8
.1
Фиг. I
Фиг.}
