1
датчик 4 частоты вращения, а в воздушном зазоре - датчики 10.1 и 10.2 Холла, Обмотка возбуждения СД 1 подключена к системе возбуждения 3. Выходы датчиков соединены с входами вычислителя (В) 23 модуля тока статора и первого преобразователя (ПФ) 25 фаз. Выход ПФ 25 соединен с одними входами прямого преобразователя (ПП) 12 координат, другие входы к-рого связаны с соответствующими выходами тригонометрического анализатора (ТА) 11 и соответствующими входами обратного преобразователя (ОП) 13 координат. Входы ТА 11 подключены к датчикам 10.1 и 10.2 соответственно и к входам вычислителя (в) 9 модуля главного потокосцепле- ния. Третий выход ТА 11 соединен с одним из входов блока 14 компенсации перекрестных связей, образованного объединенными первыми входами блоков 15 и 16 умножения блока 14. Один выход ГО1 12 подключен к входам блока 21 сравнения и блока 20 поддержания ортогональности векторов, реализую. i iici . . щего функцию i -, где i ,
составляющие вектора тока статора во вращающихся координатах; с, модуль вектора тока статора; i -то ротора. Другой выход ПП 12 соединен с первым входом блока 22 сравнения и с входом блока 14, образованного первым входом блока сравнения, второй вход к-рого подключен к выходу
1
Изобретение относится к электротехнике, а точнее частотно-регулируемым приводам переменного тока с векторным управлением и опорной сис- метой координат, жестко связанной с главным потокосцеплением машины, и может быть, использовано для низко- оборотных приводов, работающих в тяжелых условиях пуска, например, в горной и судостроительной промышленности. I
Цель изобретения - улучшение энергетических характеристик, увеличение
53
В 9 и входу /1е.питель блока 8 деления. Второй вход блока 22 соединен с выходом блока 20. Вход Делимое связан с выходом регулятора (Р) 7 скорости. Вход Р 7 соединен с выходом блока 5 сравнения, первый вход к-рого подключен к задатчику 6 частоты вращения, а второй вход - к выходу датчика 4. Выход делителя 8 подключен к другому входу блока 21. Выходы блоков 21 и 22 через соответствующие регуляторы 26 и 27 токов подключены к входам блока 14, образованным первыми входами блоков сравнения блока 14. Вторые входы блоков 17 и 18 соединены с выходами блоков 15 и 16 соответственно. Выходы блоков 17 и 18 подключены к ОП 13. В электрЬприводе амплитуда напряжения на выходе НПЧ 2 определяется величинами составляющих V и V относительно опорных сигналов, к-рыми являются отфильтрованные ТА 11, составляющие проекции вектора главного потокосцеп- ления на неподвижные оси об и , снимаемые с датчиков 10.1 и 10.2. Частота напряжения на выходе НПЧ 2 равна частоте вращения вектора главного потокосцепления. В электроприводе осуществляется экономичное регулирование в установившихся и переходных режимах путем минимизации тока статора. Повышается КПД, уменьшаются пульсации электромагнитного момента, а следовательно, вибрации и шум оборудования. 1 з,п.ф-лы, 4 ил.
точности управления и повьшение надежности привода. I
На фиг.1 приведена функциональная
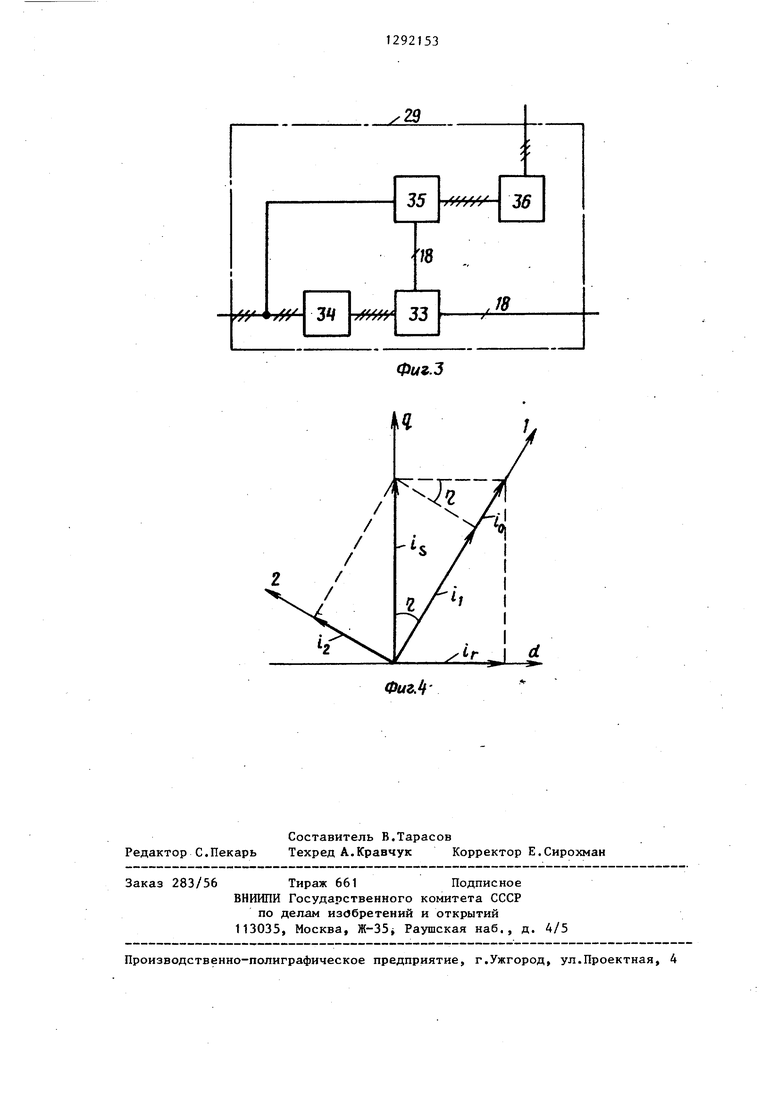
схема электропривода; на фиг.2 - функциональная схема блока поддержания ортогональности векторов тока статора и тока ротора; на фиг.З - функциональная схема системы управ- ления тиристорами; на фиг.4 - векторная диаграмма синхронной машины, поясняющая работу электропривода.
Электропривод с векторным управлением содержит синхронный электро-
31
двигатель 1, подключенный к вентильному преобразователю 2 частоты с непосредственной связью, систему 3 возбуждения, датчик 4 частоты вращения, выход которого соединен с первым входом первого блока 5 сравнения, второй вход которого подключен к за- датчику 6 частоты вращения, а выход первого блока сравнения соединен с входом регулятора 7 скорости, выход которого соединен с входом Делимое делителя 8, вход Делитель которого соединен с выходом вычислителя 9 модул главного потокосцепления, входы которого соединены с датчиками 10,1 и 10.2 Холла, установленными в зазоре синхронного электродвигателя 1, и с входами тригонометрического анализатора 11, два выхода которого соединены с первыми входами прямого преобразователя 12 координат и обратного преобразователя 13 координат а третий выход тригонометрического анализатора 11 соединен с входом блока 14 компенсации перекрестных связей, который состоит из первого
15и второго 16 блоков умножения, первого 17, второго 18 и третьего 19 сумматоров. Причем первые входы блоков 15 и 16 умножения соединены с третьим выходом тригонометрического анализатора 11. Первый выход прямого преобразователя 12 координат соединен с первым входом блока 20 поддержания ортогональности векторов, с первым входом второго блока 21 сравнения, второй вход которого соединен с выходом делителя 8, и с вторым входом первого блока 15 умножения блока 14 компенсации перекрест- ных связей. Второй выход прямого преобразователя 12 координат соединен с вторым входом третьего блока 22 сравнения и вторым входом третьего сумматора 19 блока 14 компенса- ции. Первый вход третьего сумматора 19 подключен к выходу блока вычислителя 9 модуля потокосцепления, а выход - к второму входу второго блока
16умножения блока 14 компенсации перекрестных связей. Второй вход блока 20 поддержания ортогональности векторов соединен с выходом вычислителя 23 модуля тока статора, входы которого соединены с датчиками 24 тока статора и с входами первого преобразователя 25 фаз, выходы которого подключены к вторым входам прямого преобразователя 12 коорди534
нат. Выход блока 20 поддержания ортогональности векторов соединен с первым входом третьего блока 22 срав |нения, выход которого подключен к входу первого регулятора 26 тока, выход которого соединен с первым входом первого сумматора 17, к второму входу которого подключен выход первого множителя 15 блока 14 компенсации перекрестных связей. Выход второго блока 21 сравнения соединен с входом второго регулятора 27 тока выход которого подключен к первому входу, второго сумматора 18, второй вход которого подключен к выходу второго блока 16 умножения блока 14 компенсации перекрестных связей. Выходы первого 17 и второго 18 сумматоров подключены к входам обратного преобразователя 13 координат, выходы которого подключены к входам второго преобразователя 28 фаз, который через систему 29 управления тиристорами соединен с преобразователем 2 частоты с непосредственной связью.
Блок 20 поддержания ортогональности векторов (фиг.2), реализующий
функцию i i т, содержит последовательно соединенные множитель 30, пропорциональное звено 31 и звено 32, выход которого является выходом блока, два входа множителя 30 являются входами блока.
Система 29 управления тиристорами (фиг.З) содержит формирователь 33 импульсов, формирователь 34 стробов низкой частоты, схему 35 сравнения и генератор 36 пилообразного напряжения. Причем первьй вход формирователя 33 импульсов соединен с выходом формирователя 34 стробов низкой частоты, вход которого соединен с первым входом схемы 35 сравнения, второй вход которой соединен с выходом генератора 36 пилообразного напряжения, .входом которой является вход сети. Выход схемы 35 сравнения сое-. динен с вторым входом формирователя 33 импульсов, вьгход которого соединен с тиристорами преобразователя частоты с непосредственной связью.
Электропривод работает следующим образом.
При подаче в ротор синхронной машины постоянного тока через систему 3 возбуждения на выходах датчиков 10.1 и 10.2 Холла появляются
сигналы постоянного тока, фиксирующие положение вектора главного пото- косцепления машины в пространстве.
Сигналы с выходов тригонометрического анализатора 11, синфазные входным сигналам с датчиков 10.1 и 10,2 Холла, через второй преобразователь 13 координат, второй преобразователь 28 фаз и систему 29 уп- рхавления тиристорами обеспечивают открытие групп вентилей преобразователя 2 частоты с непосредственной связью, а, следовательно, и протекание тока через обмотки статора синхронной машины 1 и в результате - возникновение электромагнитного момента и пуск в ход синхронной машины С датчиков 24 тока трехфазные сигналы поступают на вход первого преобразователя 25 фаз, с которого двухфазные сигналы поступают на вход прямого преобразователя 12 координа где из сигналов, связанных с неподвижными координатами статора, преобразуются в два сигнала постоянног тока i, и i, связанные с вращающимся обобщенным вектором главного по- токосцепления, причем составляющая i совпадает с направлением вектора главного потокосцепления, а составляющая т. перпендикулярна ей.
Так как электромагнитный момент, развиваемьй машиной, определяется векторньм произведением
М i,
следовательно, минимальньй ток статора для создания заданного электромагнитного момента при определенном значении тока ротора достигается, если обобщенный вектор тока статора направлен по оси q, т.е. ортогонале вектору тока ротора, направленному по оси d.
Из векторной диаграммы (фиг.4) определяется соотношение между составляющими тока статора во вращающихся координатах i,, i, модулем тока статора |1„| и величиной тока ротора i, гарантирующее ортогональность векторов тока статора и тока ротора
1- .L
1,.
так как
° ТГМЦГ
причем
6
м + J4 Таким образом, величина задания
1, т.е. вычисляется в блоке 20 поддержания ортогональности векторов, на вход которого поступают значения составляющей ig с выхода первого преобразователя 12 координат .и модуля тока статора, вычисленного в блоке 23, звено 31 пропорциональности осуществляет операцию т- (при
фиксированном значении тока ротора), а звено 32 с ограничением исключает возможность насьш5ения машины.
В третьем сравнивающем блоке 22 сравнивается вычисленное в блоке 20 поддержания ортогональности векторов заданное значение составляющей i i( ,,о,д с действительным значением i , вычисленным первым преобразователем 12 координат. 5 Разность этих значений с выхода третьего сравнивающего блока 22 поступает на вход первого регулятора 26 тока.
Сигнал на входе второго регулятора 27 тока представляет собой раз0
0
5
0
5
0
5
ность действительного значения составляющей тока ig и заданного значения, которое определяется величиной ошибки по скорости, которая является разницей между заданным значением скорости Б блоке 6 задания скорости и действительным значением, измеренньм датчиком 4 скорости вращения ротора.
Для независимости настройки вто- . рого регулятора 27 тока от величины модуля главного потокосцепления введен блок 8 деления, причем так как в рабочем состоянии i 0, то опасности деления на нуль нет.
Напряжение, вводимое в статор для компенсации перекрестных связей, с учетом возможности получения сигнала частоты вращения вектора главного потокосцепления машины на частотном выходе тригонометрического анализатора 11 определяется из уравнений синхронной машины, записанных в установившемся режиме в координатах, связанных с вектором главного потокосцепления машины, как
Sk
j(i -К,)ЬсО
.
- (1 -Ks),L2 jWvJVo
.-
7
На вькоде второго блока 13 преобразования координат формируются составляющие напряжения статора V, и Vj относительно опорных сигналов, которыми являются отфильтрованные тригонометрическим анализатором 11 составляющие проекций вектора главного потокосцепления на неподвижные оси oi и J3 , снимаемые с датчиков 10, и 10.2 Холла.
Составляющие напряжения в неподвижных координатах, связанных со статором, с помощью второго преобразователя 28 фаз преобразуются в три составляющие и являются входным сигналами для системы управления тиристопами. Эти сигналы, которые представляют собой напряжение синусоидальной формы, поступают на вход схемы 35 сравнения, где сравниваются с пилообразным напряжением, формируемым из сетевого напряжения блоком 36, а затем поступают на формирователь 33 импульсов, выполняющий опе- .рацию логического умножения, на второй вход которого поступают стробы низкой частоты от блока 34, обеспечивая на выходе формирователя 33 импульсов импульсы, распределенные по фазам и по тиристорам, обеспечивающи переменньй в течение полупериода выходной частоты угол отпирания тиристоров, что ведет к образованию синусоидальной огибающей в кривой выходного напряжения преобразователя час- тоты с непосредственной связью и обеспечивает линейность его. рабочей характеристики.
При этом амплитуда напряжения на выходе преобразователя частоты с непосредственной связью определяется величинами составляющих V г частота равна частоте вектора главного потокосцепления ма- шины.
I
Использование предлагаемого привода позволяет осуществить экономичное регулирование в установившихся и переходных режимах за счет минимизации тока статора, а значит, повысить КГЩ, уменьшить пульсации электромагнитного момента машины, а следовательно, вибрации и шум обо- рудования, повысить точность регулирования за счет компенсации перекрестных связей и увеличить надежность.
25
292
5 О
е35
40 45
538
Формула изобретения
1. Электропривод с векторным управлением, содержащий синхронный электродвигатель, подключенный к преобразователю частоты с непосредственной связью, систему возбуткдения синхронного электродвигателя, датчик частоты вращения, выход которого подключен к задатчику скорости, выход которого через регулятор скорости соединен с выходом блока деления, вход Делитель которого соединен с блб1ком вычисления модуля потоко- сцепления, тригонометрический анализатор, датчики тока в фазах статора, выходы которых подключены к первому преобразователю фаз токов, обратный преобразователь координат, выход которого через второй преобразователь фаз соединен с системой управления тиристорами преобразователя частоты, снабженной формирователем импульсов, два других блока сравнения и регуляторы токов, отличающийся тем, что, с целью улучшения энергетических характеристик, увеличения точности управления и повышения надежности привода, в него введены два датчика Холла, расположенные в воздушном зазоре синхронного электродвигателя, прямой преобразователь координат, вычислитель модуля тока статора, блок поддержания ортогональности векторов токов статора и ротора, реализующего функцию
lifl ih
; i . --г. 2
где 1 , 1 - составляющие вектора тока статора во вращакщихся координатах;
- модуль вектор тока статора;
ij, - ток ротора,
блок компенсации перекрестных связей, составленный ИЗ трех сумматоров и двух блоков умножения, причем первые входы первого и второго сумматоров соединены с выходами первого и второго регуляторов тока соответственно, а вторые входы сумматоров через первый и второй блоки умножения, первые входы которых объединены и подключены к третьему выходу тригонометрического анализатора, соединены соответственно с первым выходом прямого преобразователя координат и с выхо
дом третьего сумматора, входы которого подключены к второму выходу прямого преобразователя координат и к выходу вычислителя модуля пото- косцепления, при этом тригонометри- ческий анализатор входами подключен к выходам датчиков Холла и входам бло.ка вычисления модуля потокосцеп- ления, выходом соединен с первыми входами прямого преобразователя координат, вторые входы которого соединены с выходами первого преобразователя фаз токов, и с первыми входами обратного преобразователя координат, вторые входы которого связаны с выходами первого и второго сумматоров блока компенсации перекрестных связей, первый выход прямого преобразователя координат соединен с первым входом блока поддержания ортогональности векторов токов и с первым входом второго блока сравнения, второй вход которого соединен с выходом блока деления, а выход подключен к входу второго регулятора тока, вычислитель модуля
310
тока статора входами соединен с датчиками токов, а выходом - с вторым входом блока поддержания ортогональности векторов токов, выход которого соединен с первым входом третьего блока сравнения, второй вход которого соединен с вторым выходом прй- мого преобразователя координат, а выход соединен с входом регулятора
тока.
2. Электропривод по п.1, о т - личающийся тем, что в систему управления тиристорами введены формирователь стробов низкой частоты, блок сравнения, генератор пилообразного напряжения, причем первый вход формирователя импульсов соединен с выходом формирователя стробов низкой частоты, вход которого соединен с первым входом блока сравнения, выход которого соединен с вторым входом формирователя импульсов, а второй вход блока сравнения соединен с выходом генератора пилообразного напряжения, вход которого является входом сети.
Фл(г.2
Составитель В.Тарасов Редактор С.Пекарь Техред А.Кравчук Корректор Е.Сирохман
Заказ 283/56 Тираж 661Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35 Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
Фиг.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с векторным управлением | 1987 |
|
SU1443112A1 |
| Асинхронный частотно-управляемый электропривод | 1981 |
|
SU1020950A1 |
| СИСТЕМА УПРАВЛЕНИЯ МАШИНОЙ ДВОЙНОГО ПИТАНИЯ | 1995 |
|
RU2106055C1 |
| Вентильный электропривод | 1984 |
|
SU1205246A1 |
| Вентильный электропривод | 1987 |
|
SU1439727A1 |
| Устройство для частотного управления асинхронным двигателем | 1978 |
|
SU744887A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2313895C1 |
| ВЫСОКОДИНАМИЧНЫЙ БЕЗДАТЧИКОВЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ МОМЕНТОМ | 2012 |
|
RU2498497C1 |
| Электропривод переменного тока | 1979 |
|
SU928584A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
Изобретение относится к электротехнике и может быть использовано для низкооборотных приводов, работающих в тяжелых условиях пуска, например, в горной и судостроительной промышленности. Целью изобретения является улучшение энергетических характеристик, точности управления и повышение надежности. Электропривод с векториь М управлением содержит синхронный электродвигатель (СД) 1, статорная обмотка к-рого через датчики тока и непосредственный преобразователь (НПЧ) 2 частоты подключена к сети. На валу СД 1 установлен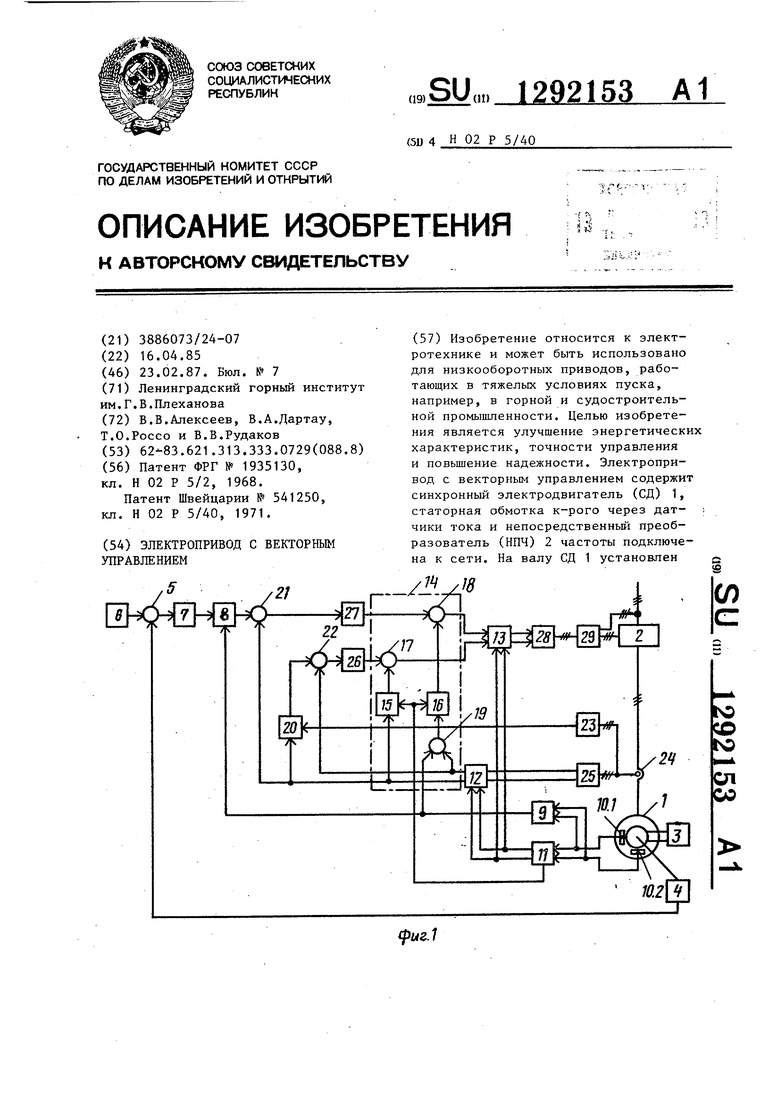
| Патент ФРГ № 1935130, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Трехфазный умножитель частоты с п-фазным выходом | 1973 |
|
SU541250A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
