(54) ПРИВОД РАБОЧИХ ОРГАНОВ iХЛОПКОУБОРОЧНОЙ 1 Изобретение относится .к сельскохозяйственному машиностроению и может быть использовано в,приводах рабочих органов хлопкоуборочных, машин . Известен привоа рабочих органов хлопко уборочной машины, содержащей двигатель, вал которого кинематически связан с вентилятором пневмотранспортной системы, вецушими колесами машины через коробку Передач и шпиндельными барабанами хлопкоуборочного аппарата. В приводе шпиндельных барабанов предусматривается ступенчатое изменение; передаточного числа, каждому из зквгчгений которого соответствует оп|эедаленное передаточное число в коробке перемены передач. Поэтому можно считать, что привод шпиндельных барабанов у этой машины осуществляется от искусственного син-- . хронного ВОМ. Привои вентилятора производится с постоянным передаточным числом, т.е. от независимого ВОМ l3 .
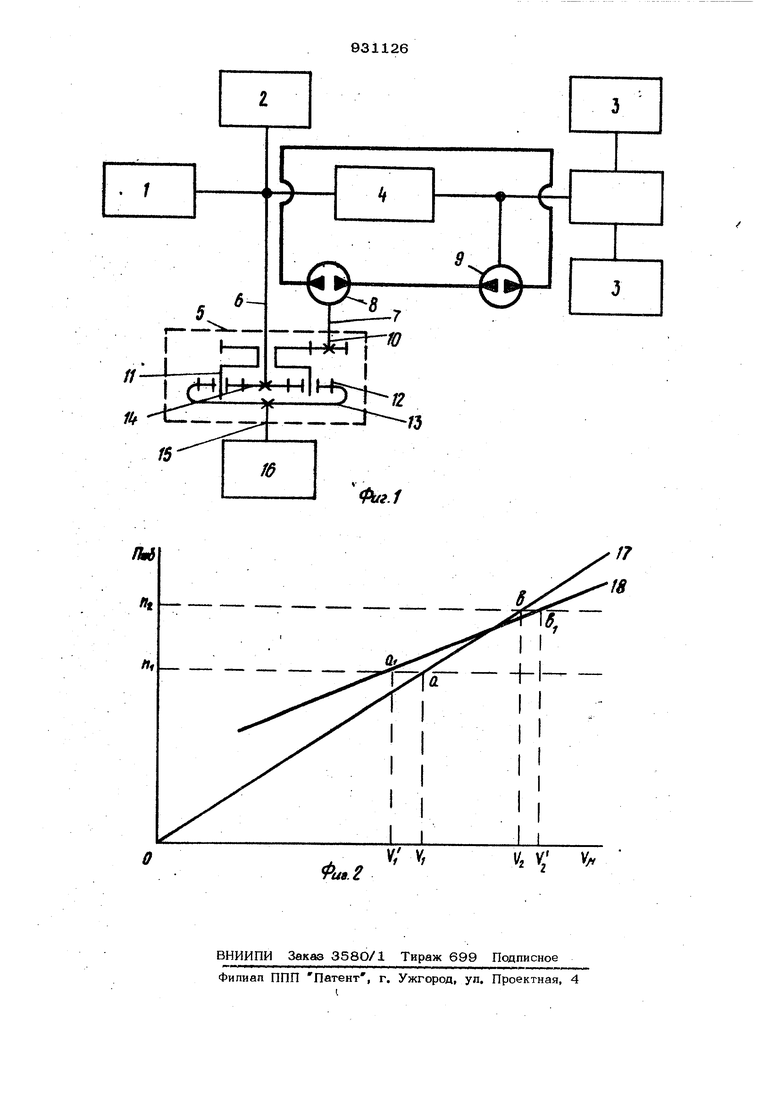
МАШИНЫ Основным недостатком привода машины ХН-3,6 является постоянство коэффици- ента опережения вращения шпиндельных барабанов, что не обеспечивает полноту съема хлопка-сырца с кустов в связи с разностью раскрытости хлопковых коробочек на кустах, даже в пределах на длине одного гона.; Крометого, невозможно учесть, сезонное изменение урожайности и среднее повышение процента раскрытости хлопковых коробочек на кустах,.что приводит к быстрому моральному старению находящихся в эксплуатации хлопкоуборочных машин. Известный привод имеет постоянный коэффициент опережения вращения шпиНдельнь1Х барабанов относительно скорости движения хлопкоуборочной машины. Следовательно, шпинделя барабанов независимо от скоростаГ- движения хлопкоуборочной машины ссюершают определенное, постоян- ное количество оборотов на единицу пройденного пути, а поэтому обладают способность снять определенное количество 39 хлопка с кажаого куска хлопчатника. При чам снижение скорости цвижония хлопко- уборной машины чаще всего связано с большей урожайностью, а слеаовательно, с необхоаимостью .за прежнее количество оборотов шпинделя барабанов на единицу пройденного пути снять большее количест во хлопка с кажаого куста хлопчатника. При снижении скорости движения и по другим причинам, например, при обрабог- ке поля на концах гона (въезде и выезае а также при переезде неровностей, остав шихся от поливочных арыков, абсолютн&я . скорость вращения шпиндельных барабано ниже Допустимой, технологическим про- , цессом съема хлопка, в связи с чем рез снижается качество уборки. ) Время увеличения скорости движения хлопкоуборочной машины связано с проходом участка с пониженной урожайность а поэтому прежнее количество оборотов .шпиндельных, барабанов на единицу пройденного пути является излишним и снижает качество уборки (хлопок остается на кустах и сбиваются коробочки). Так как у известных хлопкоуборочных машин количество оборотов шпиндельного бараба на на ециннцу пути постоянно, то при увеличении скоростного диапазона работы хлопкоуборочной машины резко снижается качество уборк-и хлопка. Цель изобретения - повышение эффективности работы машины в широком диапазоне скоростей ее перемещения. Указанная цель достигается тем, что привод рабочих органов хлопкоуборочной машины, содержащей двигатель, вал которого кинематически связан с, содержащей двигатель, вал которого кинематически связан с вентилятором пневмотран спортной системы, ведущими колесами . машины через коробку передач и шпиндельными барабанами хлопкоуборочного аппарата, дополнительно содержит введенное в кинематическую связь вала двигателя со шпиндельными барабанами суммирующее устройство с двумя входными валами, один из которых связан с валом двигателя, а другой - с выходным валом коробки передач. На фиг. 1 приведена кинематическая схема привода; на фиг. 2 - график зависимости скорости вращения шпиндельных барабанов от скорости движения машины. Привод рабочих органов хлопкоуборочной машины содержит двигатель 1, вал которого кинематически связан с вентилятором 2 пневмотранспортной системы, ведущими колесами машины 3 через ко64робку 4 передачи, и имеет суммирующее устройство 5 с двумя входными валами 6 и 7, один из которьис (6) связан с валом двигателя 1, а другой (7) - с выходным валом коробки 4 передач. Связь вала 7 с выходным валом коробки 4 передач может быть осуществлена .через гидромотор 8 с гидронасосом 9. Входной вал 7 суммирующего устройства связан через шестерню 10 с водилом 11, несущим сателлитные шестерни 12, находящиеся во внутреннем зацеплении с суммирующей 13 и с солнечной 14 шестернями, причем шестерня 13 через выходной вал 15 связана с уборочными аппаратами 16. Привод работает следующим образом. Крутящий момент от цвигагеля 1 передается через коробку 4 передач и грансмиссию на ходовые колеса 5 п на вал вентилятора 2, а на уборочные аппараты . авумя ветвями: от вала двигателя - на солнечную шестерню 14 и от вала коробки 4 через гиаропередачу - на второй входной вал суммирующего устрор ства 5 и далее на уборочный аппарат. При установившемся заданном режиме работы машины входной вал 7 и шестерня 14 синхронно передают через сателлиты 12 вращение на суммарную шестерню 13 и цалее на уборочные аппараты. При замедлении хода машины, например на конце рабочего гона, и при неи.з менном числе оборотов вала двигателя 1 вторая ветвь привода на суммагор 5 от коробки 4 передач через гицроперецачу подает уменьшенное число оборотов. Последнее Не передается непосредственно аппаратам, а через водило 11 и сателлиты 12 оказывает замедляющее возцействие на суммирующую шестерню 13 и вал привода аппаратов 16. При этом опережение вращения шпинделей аппарата над поступательной скоростью машины (коэффициент опережения) находится в заданных технологией сбора хлиика с кустов пределах и определенное время. Последнее задается при конструировании и подборе передаточного отношения сумматора 5. Замедление падения скорости вращения. шпинделей при снижении поступательной скорости машины иллюстрируется прямыми 17 и 18. Вторая из них, более пологая, показывает, что при предлагаемом приводе в сравнении с известным (прямая 17) падение скоростного режима работы аппаратов постепенное, что позволяет убирать хлопок с кустов без снижения kanecrsa (полноты съема). Кажаый шпиндель при этом пребывает в обрабатываемой кустовой среде заданное число раз и совершает еацанное число оборотов. При возрастании скорости перемещения машиньГ возму1цающее воздействие на сумматор 5 поступает от ВОМ коробки 4 передач, передающееся через гидропровод на входной вал 10. Шестерня последнего передает ускорение водилу 11, движение которого замедляется солнечной шестерней 14, получающей неизменное число оборотов от двигателя. Коэффициент опережения вращения барабанов (шпинделей) благодаря этому плавно возрастает, оставаясь в диапазоне от t} до пч допустимых оборотов, что позволяет сохранить технологически необходимое сочетание вращательного движения рабочих органов с поступательным перемещением машины (коэффициент Л ). При этом варьирование Д в технологически допустимых прецелах осуществляется Во всем аиапазоне изменения скорос ти от значения Vj (Jo 2 (точки а и Ь на прямой 18). В существующих машинах коэффициент используется только в двух значениях (точки а и b на прямой 17). .Таким образом, частота вращения шпинцельных барабанов в предлагаемом привода рагша сумме частот вращения колес и вала двигателя (синкроннонезависимом приводе). На участках с повышенной урожайностью и во время входа в гон и выхоаа из него сохраняется способность шпинделя снимать хлопок с куста хлопчатника. При увеличении.скоростидвижения хлопкоуборочной ма-шины с помощьк управления трансмиссией на участках с пониженной урожайностью или при втором и третьем сборах, когда на кусте хлопчатника сравнительно мело хлопка, изменением коцффициента опережения вращения шпиндельных барабанов повышается полнота съема хлопке. Предлагаемый привоп позволяет в среднем увеличить съем хлопка за опян проход на 5-8% во время первого сбора и уменьшить простои хлопкоуборочной машины на очистку шпиноелей от зазеленения при работе на низкоурожайных участках или во время второгр и третьего сборов. Формула изобретения Привод рабочих органов хлопкоуборочной машины, содержащий двигатель, ва; которого кинематически связан с вентилятором пневмот.ранспортной системы, ведущими колесами машины через коробку передач и шпиндельными барабанами . хлопкоуборочного аппарата, отличающийся тем, что, с целью повышения эффективности работы машины в широком диапазоне скоростей ее перемещения он содержит введенное в кинематическую связь вала двигателя со шпиндельными барабанами суммирующее устройство с двумя входными валами, один из которых связан с валом двигателя, а другой с выходным валом коробки передач. Источники информации, принятые во внимание при ;экспертизе 1. Шполянский Д. М, Комплексная механизация уборки хлопка. М., 1977.
UJ Т
г/

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ сбора хлопка-сырца | 1988 |
|
SU1834632A3 |
| Хлопкоуборочный аппарат | 1981 |
|
SU967364A2 |
| Хлопкоуборочная машина | 1949 |
|
SU92896A2 |
| Приспособление к хлопкоуборочному аппарату | 1975 |
|
SU715053A1 |
| Способ дефолиации хлопчатника и устройство для его осуществления | 1989 |
|
SU1727762A1 |
| Вертикально-шпиндельный барабан с поджимным цилиндром хлопкоуборочного аппарата | 1989 |
|
SU1766317A1 |
| Стенд для испытания аппаратов хлопкоуборочных машин | 1985 |
|
SU1282827A1 |
| Хлопкоуборочная машина | 1980 |
|
SU869645A2 |
| Вертикально-шпиндельный хлопкоуборочный аппарат | 1990 |
|
SU1761033A1 |
| Хлопкоуборочный аппарат | 1989 |
|
SU1752261A1 |
fM
Hi
Фи.2
V; V;
v, К v
ч 2
