(S) ВЕСОВОЙ ДОЗАТОР НЕПРЕРЫВНОГО ДЕЙСТВИЯ

| название | год | авторы | номер документа |
|---|---|---|---|
| Весовой дозатор непрерывного действия | 1981 |
|
SU979876A1 |
| Весовой дозатор непрерывного действия | 1980 |
|
SU951082A1 |
| Конвейерные весы | 1987 |
|
SU1451554A1 |
| Весовой дозатор непрерывного действия | 1980 |
|
SU901837A1 |
| Пневматический весовой дозатор непрерывного действия | 1977 |
|
SU684318A1 |
| Весовой дозатор непрерывного действия | 1982 |
|
SU1045001A1 |
| Дозатор сыпучих материалов | 1983 |
|
SU1111034A1 |
| Весовой дозатор непрерывного действия | 1977 |
|
SU746197A1 |
| Дозатор сыпучих материалов | 1983 |
|
SU1108335A2 |
| Весовой дозатор сыпучих материалов непрерывного действия | 1980 |
|
SU1076765A1 |

1
Изобретение относится к весодозировочной технике, в частности к непрерывному весовому дозированию сыпучих материалов, и может быть использовано в химической, металлургической, пищевой и других отраслях народного хозяйства.
Известно устройство для измерения погонной нагрузки ленточного конвей- ,д ера, содержащее весовую роликоопору с датчиками веса, подключенными к входам сумматора, выход которого подключен к одному из входов блока вычитания, другие входы которого свя- ,j замы с задатчиком массы весовой роликоопоры и с датчиком натя хения ленты конвейера. В устройстве погонная нагрузка определяется как разность между общим давлением на датчики веса 20 и суммой давлений, обуславленных массами весовой роликоопоры и давлением ле«ты, зависящим от ее натяжения l .
Однако устройство не обеспечивает возможность весового догирования сыпучих материалов.
Наиболее близким по технической сущности к предлагаемому является весовой дозатор непрерывного действия, содержащий загрузочный бункер, установленный над питателем, под ленту которого встроен грузоприемный механизм С силоизмерительным преобразо-. вателем, подключенным к одному из входов блока умножения, другой вход которого соединен с выходом преобразователя скорости ленты питателя, привод которого через усилитель подключен к выходу регулятора, один вход которого соединен с задатчиком производительности, а другой - с выходом сумматора с масштабирующими входами 2.
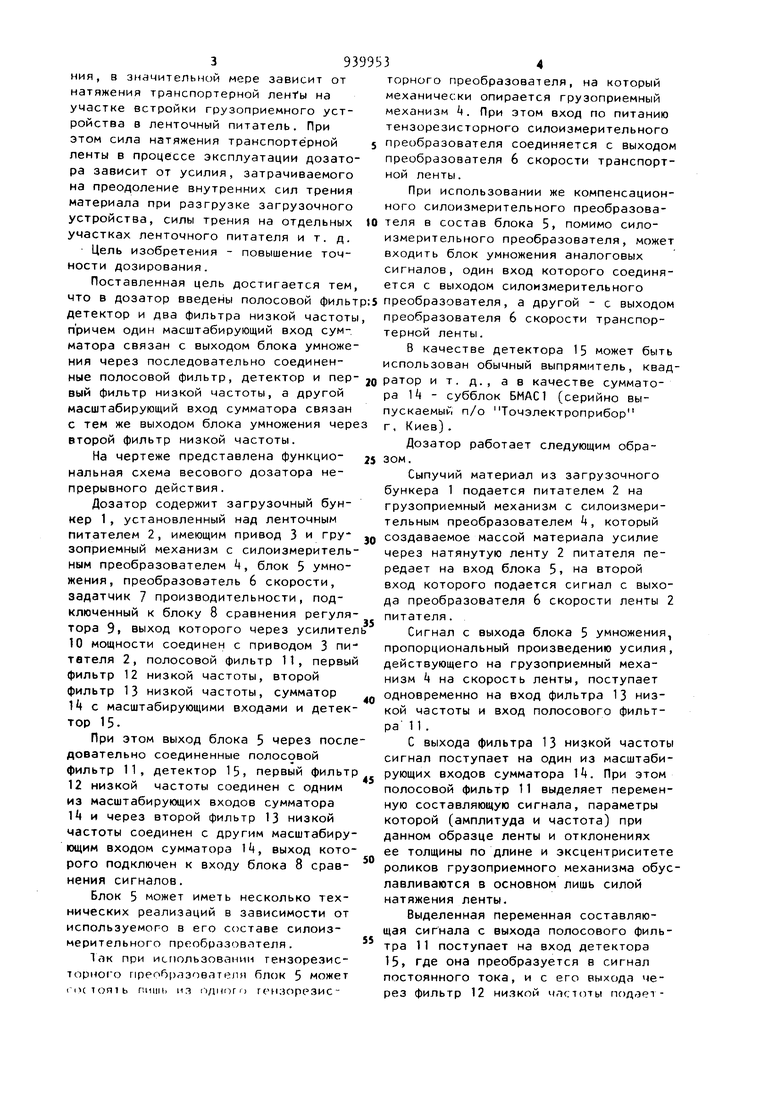
Недостатком известного устройства является то, что точность измерения расхода массы на выходе дозатора, а следовательно, и точность доз.ирования, в значительной мере зависит от натяжения транспортерной ленГы на участке встройки грузоприемного устройства в ленточный питатель. При этом сила натяжения транспортёрной ленты в процессе эксплуатации дозатора зависит от усилия, затрачиваемого на преодоление внутренних сил трения материала при разгрузке загрузочного устроиства, силы трения на отдельных участках ленточного питателя и т. д. Цель изобретения - повышение точности дозирования. Поставленная цель достигается тем, что в дозатор введены полосовой фильтр:5 детектор и два фильтра низкой частоты, причем один масштабирующий вход сумматора связан с выходом блока умножения через последовательно соединенные полосовой фильтр, детектор и пер- JQ вый фильтр низкой частоты, а другой масштабирующий вход сумматора связан с тем же выходом блока умножения через второй фильтр низкой частоты. На чертеже представлена функцио- 5 нальная схема весового дозатора непрерывного действия. Дозатор содержит загрузочный бункер 1 , установленный над ленточным питателем 2, имеющим привод 3 и грузоприемный механизм с силоизмеритель ным преобразователем Ц, блок 5 умножения, преобразователь 6 скорости, задатчик 7 производительности, подключенный к блоку 8 сравнения регуля тора 9 выход которого через усилите 10 мощности соединен с приводом 3 пи тателя 2, полосовой фильтр 11, первы фильтр 12 низкой частоты, второй фильтр 13 низкой частоты, сумматор 14 с масштабирующими входами и детек тор 15При этом выход блока 5 через посл довательно соединенные полосовой фильтр 11, детектор 15, первый фильт 12 низкой частоты соединен с одним из масштабирующих входов сумматора 1 и через второй фильтр 13 низкой частоты соединен с другим масштабиру ющим входом сумматора И, выход кото рого подключен к входу блока 8 сравнения сигналов. Блок 5 может иметь несколько технических реализаций в зависимости от используемого в его составе силоизмерительного преобразователя. Так при использовании гензорезисTopHoio преобрлзоелтеля блок 5 может iixTonib runiib из )го гензорезисторного преобразователя, на который механически опирается грузоприемный механизм Ц. При этом вход по питанию тензорезисторного силоизмерительного преобразователя соединяется с выходом преобразователя 6 скорости транспортной ленты.
При использовании же компенсационного силоизмерительного преобразователя в состав блока 5, помимо силоизмерительного преобразователя, может входить блок умножения аналоговых сигналов, один вход которого соединяется с выходом силоизмерительного преобразователя, а другой - с выходом преобразователя 6 скорости транспортерной ленты. в качестве детектора 15 может быть использован обычный выпрямитель, квадратор и т. д., а в качестве сумматора Н - субблок БМАС1 (серийно выпускаемый п/о Точэлектроприбор г, Киев). Дозатор работает следующим образом. Сыпучий материал из загрузочного бункера 1 подается питателем 2 на грузоприемный механизм с силоизмерительным преобразователем А, который создаваемое массой материала усилие через натянутую ленту 2 питателя передает на вход блока 3. на второй вход которого подается сигнал с выхода преобразователя 6 скорости ленты 2 питателя. Сигнал с выхода блока 5 умножения, пропорциональный произведению усилия, действующего на грузоприемный механизм на скорость ленты, поступает одновременно на вход фильтра 13 низкой частоты и вход полосового фильтра 1 1 . С выхода фильтра 13 низкой частоты сигнал поступает на один из масштабирующих входов сумматора It. При этом полосовой фильтр 11 выделяет переменную составляющую сигнала, параметры которой (амплитуда и частота) при данном образце ленты и отклонениях ее толщины по длине и эксцентриситете роликов грузоприемного механизма обуславливаются в основном лишь силой натяжения ленты. Выделенная переменная составляющая сигнала с выхода полосового фильтра 11 поступает на вход детектора 15. где она преобразуется в сигнал постоянного тока, и с его выхода через фильтр 12 низкой частоты подгэепся на второй масштабирующий вход сумматора . Образованный в результате сложения в блоке 4 сигнал сравнивается в блоке 8 с сигналом задатчика 7 производительности.
При наличии рассогласования этих сигналов с выхода блока 8 сравнения сигналов на вход регулятора 9 поступает сигнал ошибки, в результате чего регулятор 9 вырабатывает управляю- Ю сти щее воздействие, которое усиленное усилителем 10 мощности поступает на привод 3 питателя 2 и устраняет вызванное отклонение производительност Введение в конур управления дозатором фильтры 11-13 и детектор 15 и масштабные коэффициенты алгебраического сумматора 1k выбраны из условия обеспечения равенства нулю среднего значения сигнала на выходе сумматора 14 при отсутствии материала на ленте питателя 2, и обеспечивают исключени влияния силы натяжения ленты на результат измерения расхода массы на выходе дозатора, а,соответственно, и на результат формирования заданной величины производительности на выходе дозатора. Так в случае изменения силы «натяжения ленты, происходит изменение среднего уровня сигнала, снимаемого с выхода фильтра 13 низкой частоты, при одновременном изменении величины наибольших отклонений сигнала, снима емого с выхода полосового фильтра 11 величина которых для конкретных конс рукций ленточного питателя определяется в основном лишь силой натяжения ленты. При этом сигнал на выходе фильтра 12 низкой частоты так же увеличивается, а сигнал на выходе сумматора I остается неизменным, пропорциональным текущему значению производительности и не зависит от неинформативного пара метра (силы натяжения ленты). При этом на выходе дозатора производитель ность остается равной заданному значению на задатчике 7В случае же увеличения веса материала при постоянной величине силы натяжения средняя величина сигнала на выходе блока 5 увеличивается, а величина наибольших отклонений сигнала на выходе детектора 15, обусловленная силой натяжения, остается без изменений. При этом сигнал на выходе сумматора k увеличивается пропорционально увеличению текущего значения производительности.
В результате сравнения сигналов, снимаемых с выхода сумматора I и задатчика 7, на выходе блока 8 возникает ошибка, регулятор 9 снижает управляющее воздействие, которое поступает на привод 3 питателя 2, и вызванное отклонение производительноустраняется путем снижения скорости питателя 2. Устройство было испытано на лабораторном стенде при дозировании речного песка и полиэтиленовой крошки. При этом изменение силы натяжения транспортерной ленты составляло +5, а интегральное значение погрешности дозатора не превышало +0,5% за 3 мин, в то время как на известной конструкции дозатора указанная погрешность составляла +1,21. Использование предложенного дозатора позволит существенно повысить точность дозирования, что дает экономию сырья, повысит качество продукции. Формула изобретения Весовой дозатор непрерывного действия, содержащий загрузочный бункер, установленный над питателем, под ленту которого встроен грузоприемный механизм с силоизмерительным преобразователем подключенным к одному из вхо дов блока умножения, другой вход которого соединен с выходом преобразователя скорости ленты питателя, привод которого через усилитель подключен к выходу регулятора, один вход которого соединен с задатчиком производительности, а другой - с выходом сумматора с масштабирующими входами, отличающийся тем, что, с целью повышения точности дозирования, в него введены полосовой фильтр, детектор и два фильтра низкой частоты, причем один масштабирующий вход сумматора связан с выходом блока умножения через последовательно соединенные полосовой фильтр, детектор и первый фильтр низкой частоты, а другой масштабирующий вход сумматора связан с тем же выходом блока умножения через второй фильтр низкой частоты. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР ff 779815, кл. G 01 G П/04, 1978. 2.Авторское свидетельство СССР If , кл. С 01 G 11/12, 1977 (прототип).
