которые поступают на входы блока вы- чл-тслепия и дллсе на входы аиг ебрая- ческих сумма оротз 12 к 13 (ЛС), на выходе которых будут сигналы, пропорциональные соответствекио алгебраи- чеохой сумме к разности сигналов силоизмерительных элементов, Частное от делення этих снг налоз формируется в блоке 6, сигнал поступает на вход АС 14, па вход Минус которого постуиа;от с и- иалъ1 с выхода за- датчнка 17 постоя ных снгналов. С
Изобретение огносится к весоиз- меритбоЛьной технике, в к устройствам для весового ,,ози1х:1Г П1ия сыпучих матерпалоБ,
Цель изобретения -- повьилеггие точ- пос тп за счет исключения составляю- п,е-й ошибки, обусловленной нестаби; гь- ностыо коэффициента пере.цачи сштоиэ- мерителыюго элемента, а так-ке вариации гравитационного поля Зеичлн Б различных ее точках.
Ма фиг. 1 показана функциональная дозатора; на фиг. 2 - функцио- наньнал схема блока вычислания те-- кувг.его знггчения массы; на , 3 -- функциональная c;xe;-.ia б.п:ока управ1те- ния.
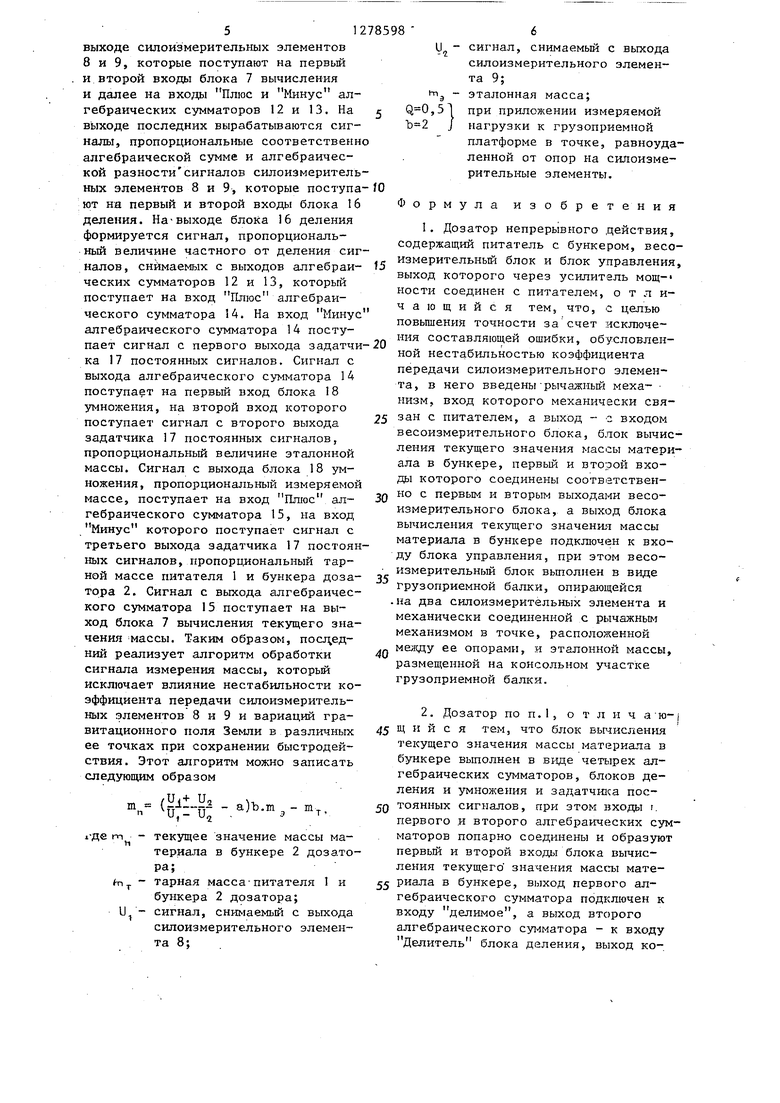
Дозатор {фиг. 1) содер;кнт питатель 1 с бупкером 2, весспзмер1-;тель ньш блок 3, блок 4 унравленг Гч, выход которого через усилитель 5 г-и;л,- ности соед1 Нен. с питателем 1, тллчаж- ; ньп г мехаш-Езм б, вход которого 1п-1чес5си связан с питателе - , а ЕЫ-- ход с входом весоизмерительного блока 3, 7 вычисления теку1цего значения массы, первый вход, котор го связан-с нериым выходок весоизмерительного 3. Второй выход весоизмерительного блока 3 связан с вто- рыь: входом блока 7 вычисления. Выход последнего с.овдинен с вход,ом блока 4 управления. При этом весоизмери-- тедьнь й блок 3 содержит два силоиз- мерительных :- лвмента 8 л 9, грузо- приемнута платформу 10, выполненную в виде балк,, опирающейся па два сч лоизмерительг;ъ х элемемта 8 и 9, вы-выхода ЛС 1ч сигнал ностулает на пер- Bbiii вход, блока 18 умножг;:ня, ка второй вход KOTOpoi o нос гупгет сигнал с задатчика 17 ностоянны : сигналов. С выход; блока 18 умножеЕ -;я сигнал пропорциональный иямеряе -::ой массе, поступает на вход ЛС 15, на другой вход jcoToporo поступает сигнал с вь хода задатчика 17 постоянных сигна- лои, прон.орциональныг1 тарной массе питателя и бункера дозатсра. 1 з.п. ф- лы, 3 ил.
5
0
ход каждого из которых согдинен с одним из выходов DecOi-i3Me;Hr; enbHor o блока 3. Вход 5юслед его механически соеди ге}1 с г рузопртаеьнюй платформой 10 в точке, рас.поло;1;е; ной между ее опорами на сиггоизмеррп ельныа элементы 8 и 9. Этало1п-1ая масса li размещена на консольном участке г рузо- н.риемной платформы 10.
Блок 7 вычисления а-екущего значе- i-сия массы (фиг 2) содержит апгебраи- ч.еские сумматорь 12-13, блок 16 деления, первый вход которого связан с зь ходо: ал1 ебраинеско1 о . сумматора 13, выход блока 16 деления соед1П1ет{ с входоьг Плюс ;ип;ебраичес.- кого сумматора Ь и В5;од Иинус которого связан с первь м .зыходо:- задат- чика 17 постоянных сигналов, блок 18 умножения,, первы БХО,Ц которого соединен с выхо,цом алгебраггческого сум
выходом задатчгаса 17 постоянных сиг- яалов.( выхо,гг блока 18 у7. пс ;кепня свя- за.к с вxoдo Пл ос йлл-ебранческого сумма.тора 15, зход Минус которого связан с треть выходом задатчика 17 постоянных сиг налоа. ЕЬ:ХОД алгебраического сумматора 15 связан с выходом блока 7 ,пенил текущего зиачени; массы, г ерзый эхсд которого соединен с входом Еглсс алгебрак- cyi-it-iarorm 12 п входом Плюс лгебраическог о с уг маторй 13, при этом второй вход блока 7 вычисления токзпцего зиа ;ения массы связан с вхо- доь Плюс алгебг)аическот о cyм ;aтo- ра 12 и входом Киггус алгебраического сумматора 13.
Блок 4 управления (фиг, 3) состоит из интегратора 19, двух алгебраических сумматоров 20 и 21, коммутатора 22, регулятора 23 с элементом 24 сравнения, блока 25 сравнения еиг- 5 налов текущего значения массы и за- датчика 26 массы материала в бунке- .ре дозатора, а также задатчика 27 расхода массы, выход которого соедибатывая, соединяет выход задатчика 27 расхода массы с входом интегратора 19, выход алгебраического тора 20 - с первым входом элемента 24 сравнения регулятора 23, выход задатчика 26 массы материала - с вторым входом :элемента 24 сравнения регулятора 23. При этом на алгебраическом сут гматоре 20 происходит суммиро20
25
йен с одним из входов алгебраического 0 вание сигналов, пропорциональных со- сумматора 21 и через коммутатор 22 - с входом интегратора 19, выход которого соединен с одним из входов алгебраического сумматора 20, второй вход которого соединен с входом блока 4 управления и одним из входов блока 25 сравнения сигналов. Выход алгебраического сумматора 20 через коммутатор . 22 соединен с одним из входов элемента 24 сравнения регулятора 23, второй вход которого через коммутатор 22 соединен с выходом задатчика 26 массы материалов и вторым входом блока 25 сравнения сигналов. При этом выход последнего соединен с управляющим входом коммутатора 22, Второй вход алгебраического сумматора 21 соединен с выходом регулятора 23, а выход алгебраического сумматора 21 соединен с выходом блока 4 управления,
Дозируемый материал из бункера 2 подается в технологическую линию производства пшеком питателя I, скорость вращения которого пропорциональна величине сигнала, снимаемого с выхода блока 4 управления. Последний на основе информации, поступающей на его вход от блока 7 вычисления текущего значения массы, измеряемой весоизмерительным блоком 3, вырабатывает управляющий сигнал, который поступает на вход питателя 1 через yci-шитель 5 мощности и обеспечивает равенство текущего значения величины расхода массы дозируемого материала на выходе дозатора зада1П1ому его значению в блоке 4 управления, которое работает следую- шдм образом.
По мере выхода материала из бункера 2 сигнал с выхода блока 7 вычисления уменьшается и при равенстве сигналов с выхода блока 7 и задатчика 26 массы материала в бункере 55 срабатывает блок 25 сравнения сигналов, подавая команду на управляющий вход коммутатора 22. Последний, сраответственно массе материала, которая должна выдаваться дозатором за интервал времени от момента равенства массы материала в бункере 2 за данной ее величине задатчиком 26 до текущего момента времени, и массе материала, оставшегося в бункере 2. При отклонении текущего значения величины расхода массы дозируемого материала на выходе дозатора от за- ; данного его значения задатчиком 27 на выходе элемента 24 сравнения формируется сигнал ошибки, пропорцио- нальньй алгебраической сумме сигналов, снимаемых с выходов интегратора 19, блока 7 и задатчика 26. Сигнал ошибки с выхода элемента 24 сравнения отрабатывается регулятором 23, при этом на выходе регулятора 23 фор мируется корректирующее воздействие, которое алгебраически суммируется сумматором 21 с сигналом, снимаемым с выхода задатчика 27 расхода массы и поступает на выход блока 4 управ-,
35 ления и далее через усилитель 5 мощности на вход питателя 1, устраняя таким образом отклонение выходной величины расхода дозатора от задан- ной ее величины задатчиком 27. Зависимость результата измерения массы материала от нестабильности коэффициента передачи силоизмерительных элементов 8 и 9 и от вариации гравитационного поля Земли в -различных ее точках исключается за счет реализации следуюа ей процедуры измерения и алгоритма обработки сигналов, снимаемых с выходов силоизмерительных элементов 8 и 9 блоком 7 вычисления текущего значения массы.
На предварительно подгруженнзпо грузоприемную платформу 10 эталонной массой I1 прикладывают через рычажный механизм б измеряемую массу. С11пы, обусловленные эталонной и измеряемой массами, вызывают из- менение параметров чувствительных элементов и изменение сигналов па
40
45
50
батывая, соединяет выход задатчика 27 расхода массы с входом интегратора 19, выход алгебраического тора 20 - с первым входом элемента 24 сравнения регулятора 23, выход задатчика 26 массы материала - с вторым входом :элемента 24 сравнения регулятора 23. При этом на алгебраическом сут гматоре 20 происходит суммиро0
5
0 вание сигналов, пропорциональных со-
5
ответственно массе материала, которая должна выдаваться дозатором за интервал времени от момента равенства массы материала в бункере 2 за данной ее величине задатчиком 26 до текущего момента времени, и массе материала, оставшегося в бункере 2. При отклонении текущего значения величины расхода массы дозируемого . материала на выходе дозатора от за- ; данного его значения задатчиком 27 на выходе элемента 24 сравнения формируется сигнал ошибки, пропорцио- нальньй алгебраической сумме сигналов, снимаемых с выходов интегратора 19, блока 7 и задатчика 26. Сигнал ошибки с выхода элемента 24 сравнения отрабатывается регулятором 23, при этом на выходе регулятора 23 формируется корректирующее воздействие, которое алгебраически суммируется сумматором 21 с сигналом, снимаемым с выхода задатчика 27 расхода массы и поступает на выход блока 4 управ-,
5 ления и далее через усилитель 5 мощности на вход питателя 1, устраняя таким образом отклонение выходной величины расхода дозатора от задан- ной ее величины задатчиком 27. Зависимость результата измерения массы материала от нестабильности коэффициента передачи силоизмерительных элементов 8 и 9 и от вариации гравитационного поля Земли в -различных ее точках исключается за счет реализации следуюа ей процедуры измерения и алгоритма обработки сигналов, снимаемых с выходов силоизмерительных элементов 8 и 9 блоком 7 вычисления текущего значения массы.
На предварительно подгруженнзпо грузоприемную платформу 10 эталонной массой I1 прикладывают через рычажный механизм б измеряемую массу. С11пы, обусловленные эталонной и измеряемой массами, вызывают из- менение параметров чувствительных элементов и изменение сигналов па
0
5
0
51
выходе силоизмерительных элементов 8 и 9, которые поступают на первьй и второй входь блока 7 вычисления и далее на входы Плюс и Минус алгебраических сумматоров 12 и 13. На выходе последних вырабатываются сигналы, пропорциональные соответственн алгебраической сумме и алгебраической разности сигналов силоиэмеритель ных элементов 8 и 9, которые поступа ют на первый и второй входы блока 16 деления. На-выходе блока 16 деления формируется сигнал, пропорциональный величине частного от деления сигналов, снимаемых с выходов алгебраи- ческих сумматоров 12 и 13, который поступает на вход Плюс алгебраического сумматора 14. На вход Минус алгебраического сумматора 14 поступает сигнал с первого выхода задатчи ка 17 постоянных сигналов. Сигнал с выхода алгебраического сумматора 14 поступает на первый вход блока I8 умножения, на второй вход которого поступает сигнал с второго выхода задатчика 17 постоянных сигналов, пропорциональный величине эталонной массы. Сигнал с выхода блока 18 умножения, пропорциональный измеряемой массе, поступает на вход Плюс алгебраического сумматора 15, на вход Минус которого поступает сигнал с третьего выхода задатчика 17 постоянных сигналов, пропорциональный тарной массе питателя 1 и бункера дозатора 2. Сигнал с выхода алгебраического сумматора 15 поступает на выход блока 7 вычисления текущего значения массы. Таким образом, ний реализует алгоритм обработки сигнала измерения массы, которьй исключает влияние нестабильности коэффициента передачи сипоизмеритель- ных элементов 8 и 9 и вариаций гравитационного поля Земли в различных ее точках при сохранении быстродействия. Этот алгоритм можно записать следующим образом
т„ Ф--. - а)Ъ.ш , U,и„
т.
де г
1т -,
и/текущее значение массы материала в бункере 2 дозатора;
тарная массапитателя 1 и бункера 2 дозатора; сигнал, снимаемый с выхода силоизмерительного элемента В;
51
сигнал, снимаемый с выхода силоизмерительного элемента 9;
эталонная масса; при приложении измеряемой нагрузки к грузоприемной платформе в точке, равноудаленной от опор на силоизме- рительные элементы.
Формула изобретения
1. Дозатор непрерывного действия, содержащий питатель с бункером, весоизмерительный блок и блок управления, выход которого через усилитель мощ- ности соединен с питателем, отличающийся тем, что, с целью повышения точности за счет исключения составляющей ошибки, обусловленной нестабильностью коэффициента передачи силоизмерительного элемента, в него введены-рычажньш меха- низм, вход которого механически связан с питателем, а выход - с входом весоизмерительного блока, блок вычисления текущего значения массы материала в бункере, первый и второй входы которого соединены соответственно с первым и вторым выходами весоизмерительного блока,, а выход блока вычисления текущего значения массы материала в бункере подключен к входу блока управления, при этом весоизмерительный блок вьшолнен в виде грузоприемной балки, опирающейся на два силоизмерительных элемента и механически соединенной с рычажным механизмом в точке, расположенной между ее опорами, и эталонной массы, размещенной на консольном участке грузоприемной балки.
f5 20
2. Дозатор по П.1, о т л и ч а-ю45 Щ и и с я тем, что блок вычисления текущего значения массы материала в бункере выполнен в виде четырех алгебраических сумматоров, блоков деления и умножения и задатчшса пос- 5Q тоянных сигналов, при этом входь . первого .и второго алгебраических сумматоров попарно соединены и образуют первый и второй входы блока вычисления текущего значения массм мате- 55 риала в бункере, выход первого алгебраического сумматора подключен к входу делимое, а выход второго алгебраического cyivjMaTopa - к входу Делитель блока деления, выход ко71
торого подключен к входу Плюс третьего алгебраического сумматора, вход Минус которого соединен с первым выходом задатщпса постоянных сигналов, а выход - с nepsbiNt входом блока умножения, второй вход которо- ТО соединен с вторьп выходом задат- чшса постоянных сигналов, а выход 2785988
с входом ILiioc четвертого алгебраического сумматора, к входу Минус которого подключен третий выход за- датчика постоянных сиглалов, а вы- 5 ходом четвертого алгебраического с а шатора образован выход блока вычисления, текущего значения массы материала в бункере.
Фаг. 1
,ч
231
Редактор И. Рогулич
Фиг.
Состап итель В. Ширшов Техред Л,Сердюкоиа
Заказ 6820/35Тиралс 705. Подшгсное
ВНИ ШИ Государственного комитета СССР
по делам изобретений и открытш 113035, Москва, Ж-35, Раушская наО., д. 4/5
Производственно-полиграфическое нредпрнятие, г. Ужгород, ул. Проектная, 4
Корректор. С. Шекмар
| название | год | авторы | номер документа |
|---|---|---|---|
| Весовой дозатор непрерывного действия | 1980 |
|
SU939953A1 |
| Способ весового дозирования сыпучих материалов и дозатор сыпучих материалов | 1980 |
|
SU932265A1 |
| Весовой дозатор непрерывного действия | 1975 |
|
SU670818A1 |
| Дозатор сыпучих материалов | 1986 |
|
SU1432338A1 |
| Весовой дозатор непрерывного действия | 1982 |
|
SU1045001A1 |
| Дозатор сыпучих материалов | 1983 |
|
SU1111034A1 |
| Весовой дозатор непрерывногодЕйСТВия | 1978 |
|
SU794390A1 |
| Весовой дозатор непрерывного действия | 1982 |
|
SU1059443A1 |
| Весовой дозатор непрерывного действия | 1980 |
|
SU951082A1 |
| Дозатор сыпучих материалов | 1990 |
|
SU1765713A1 |
Изобретение относится к весоизмерительной технике и позволяет повысить точность за счет исключения составляющей ошибки, обусловленной нестабильностью коэффициента передачи силоизмерительного элемента, а также вариации гравитационного поля Земли в различных ее точках. На платформу с .эталонной массой прикладывают измеряемую массу, полученные силы вызыва рт изменение сигналов на выходе силоизмерительных элементов. to 00 1СЛ со 100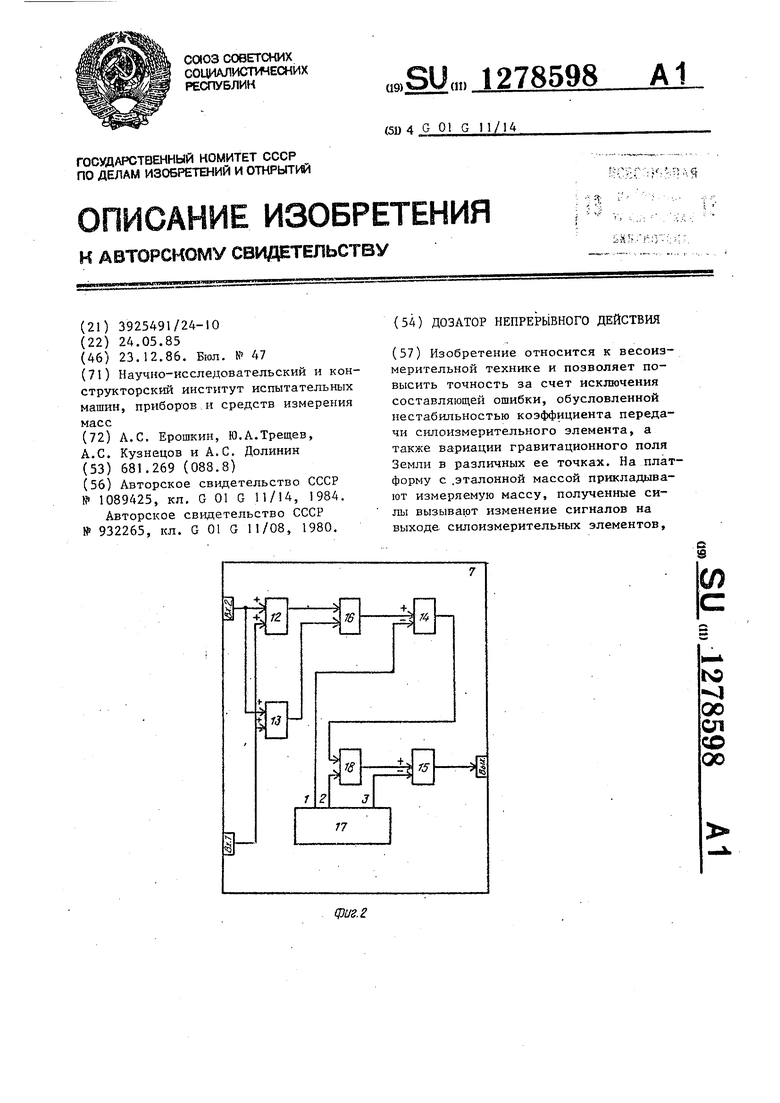
| Устройство для определения весового расхода и контроля качества сыпучего материала | 1982 |
|
SU1089425A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ весового дозирования сыпучих материалов и дозатор сыпучих материалов | 1980 |
|
SU932265A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| фиг | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
