. (54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1982 |
|
SU1045992A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2176950C2 |
| Устройство для управления манипулятором | 1987 |
|
SU1445948A1 |
| Шпаговый манипулятор | 2018 |
|
RU2691349C1 |
| Задающий орган манипулятора | 1986 |
|
SU1393619A1 |
| Шпаговый манипулятор | 2018 |
|
RU2691174C1 |
| МАШИНА ЛЕСОЗАГОТОВИТЕЛЬНАЯ | 2011 |
|
RU2464775C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691172C1 |
| МАШИНА ЛЕСОЗАГОТОВИТЕЛЬНАЯ | 2011 |
|
RU2473209C2 |
| Установка для межоперационного перемещения заготовок | 1982 |
|
SU1061904A1 |
Изобретение относится к области подъемно-транспортного машиностроения, в частности к ковочным манипулятог рам.
Известен манипулятор, содержащий исполнительный орган, выполненный в виде двуплечего рычага, установленного на подвижной опоре, имвощей направляющие, причем на одном плече рычага расположен захватный орган, а на другом - рукоятки управления ij.
Недостатком изобретения является узкая зона манипулирования объектом в пространстве.
Целью изобретения является расширение зоны обслуживаемого прост- ранства.
Цель достигается тем, что испоп- . нительный орган снабжен шарниром, на оси 1 оторого установлены введенные опоры качения, установленные в направляющих подвижной опоры.
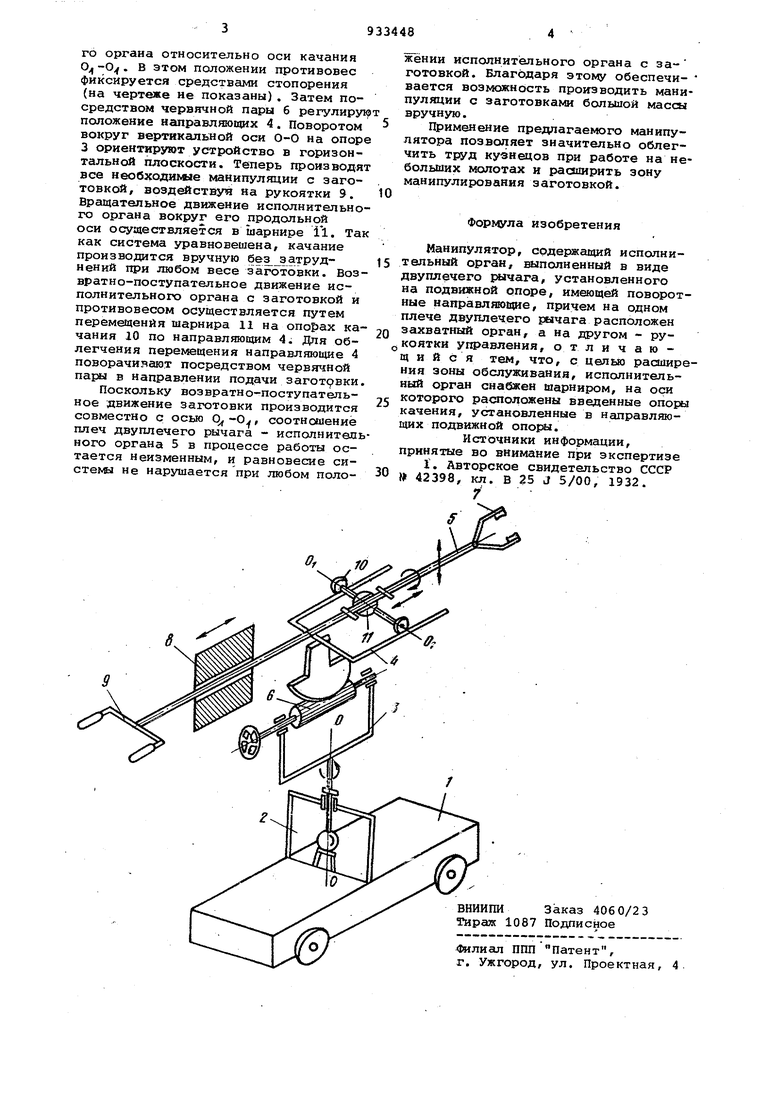
На чертеже изображена кинематическая схема манипулятора.
Манипулятор содержит платформу 1 с вертикальной стойкой 2, на которой с возможностью поворота в горизонтальной плоскости вокруг оси р-о установлена подвижная опора 3.
Эта опора снабжена направляющими 4, смонтированнными с возможностыо по- ворота в плоскости качания исполнительного органа 5 (хобота) от самотормозящего механизма, выполненнотю в виде червячной пары 6. Исполнительный орган 5 представляет собой двуплечий рычаг, на одном плече которого расположен захзатный- орган 7,
10 а на другом - подвижный противовес в и рукоятки управления 9. На направляющих 4 посредством опор качения 10 установлен шарнир 11 хобота.
Исполнительный орган 5 смонтиро15ван в шарнире II с возможностью вращения вокруг своей продольной оси. В то же время 11 имеет возмож ность качания совместно с исполнительным органом в вертикальной плос20кости вокруг оси . При этом ось качания шарнира 11 совмещена с осью опор вращения 10.
Работает манипулятор следующим образом.
25
В захватном органе 7, управляемом рукоятками 9, посредством самотормозящего механизма (на чертеже не показан) зажимают.заготовку. Подвижный .противовес 8 перемещают по хоботу до
30 достижения равновесия исполнительно
