(5) УСТРОЙСТВО ДЛЯ ТОРМОЖЕНИЯ ЭЛЕКТРОВОЗА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для торможения компаундного тягового двигателя электровоза | 1977 |
|
SU651987A1 |
| Устройство для торможения электровоза | 1990 |
|
SU1766724A1 |
| СИСТЕМА ТОРМОЖЕНИЯ АВТОМАТИЧЕСКАЯ РЕОСТАТНАЯ И СПОСОБ ЕЕ РАБОТЫ | 2023 |
|
RU2818593C1 |
| Устройство для торможения электровоза | 1981 |
|
SU962043A1 |
| Способ реализации рекуперативного торможения без балластных резисторов на электровозах переменного тока | 2019 |
|
RU2721084C1 |
| СПОСОБ ВЫРАВНИВАНИЯ НАГРУЗКИ ТЯГОВЫХ ДВИГАТЕЛЕЙ ЭЛЕКТРОВОЗА ПЕРЕМЕННОГО ТОКА | 2018 |
|
RU2724981C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ МОМЕНТОМ ТЯГОВЫХ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА НА ЭЛЕКТРОПОДВИЖНОМ СОСТАВЕ | 2007 |
|
RU2344949C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1998 |
|
RU2130840C1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| Способ регулирования скорости движения тепловоза в режиме электрического торможения | 2017 |
|
RU2652481C1 |
Изобретение относится к железнодорожному транспорту и может быть ис- : пользовано при создании системы управления рудничным электровозом. Известно устройство для торможения электровоза, содержащее датчик минимального тока, подключенный входом к контактной сети, а выходом - к входу блока включения и к одному из выводов обмотки якоря тягового двигателя, другой вывод которого подключен к одной из диагоналей выпрямительного моста, в другую диагональ которого включена цепь из последовательно соединенных обмотки возбуждения и одной из катушек управляемого механического тормоза, и блок электродинамического т.орможения, соединенный входом с выходом блока включения D Однако известное устройство характеризуется недостаточной надежностью работы,Обусловленной отсутствием контроля работы цепи блока электродинамического торможения. При переходе привода из двигательного режима в режим электродинамического торможения, что имеет место при уменьшении тока двигателя ниже порогового значения, срабатывает датчик минимального тока, который включает-блок включения, соединяющий тяговый двигатель с блоком электродинамического торможения. Осуществляется реализация режима динамического торможения, в результате чего уменьшается скорость электровоза, а следовательно, величины электродвижущей силы и тока тягового двигателя. Обесточиваются обе обмотки двухобмоточной катушки механического тормоза. Осуществляется режим механического торможения, и электровоз останавливается. Однако при выходе из строя датчика минимального тока, блока включения, блока электродинамического торможения или обрыве цепи электродинамического торможения не о ществляется режим электродинамического торможения. Вторая обмотка двухобмоточной
катушки управления механическим тормозом находится под током, так как электродвижущая сила тягового двигателя не уменьшается. Привод электровоза неуправляем. Механический тор- , моз не срабатывает и электровоз не останавливается.
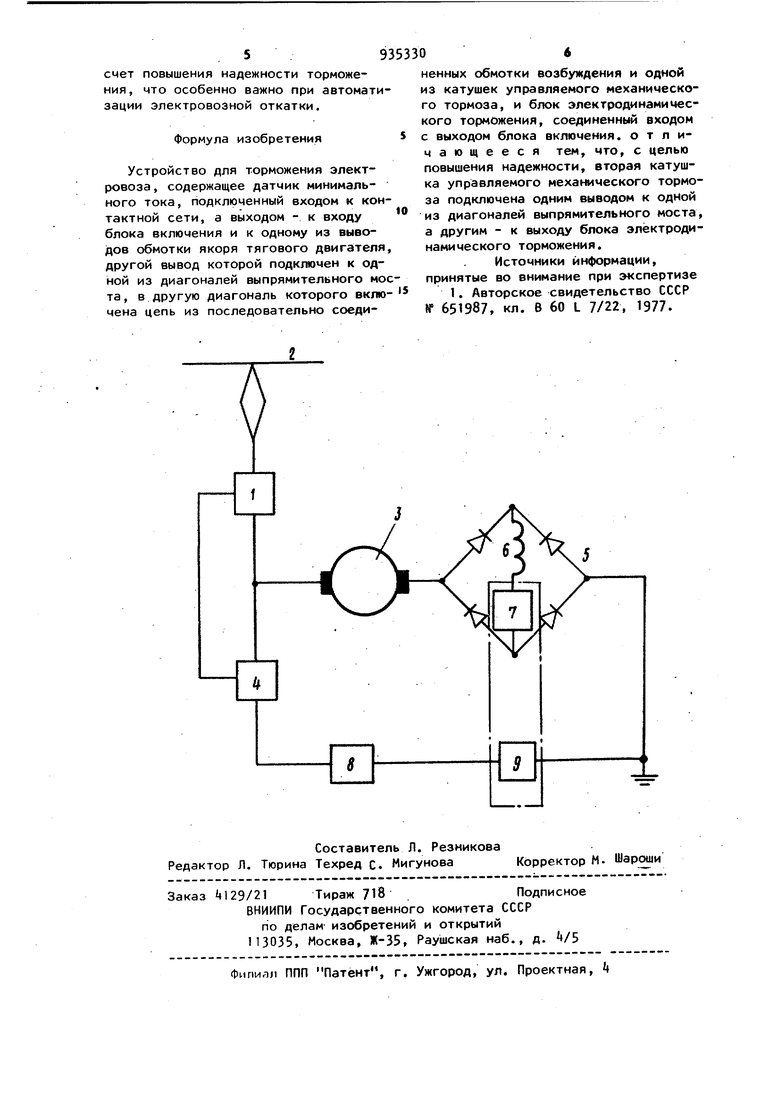
Целью изобретения является повышение надежности торможения электровоза. Поставленная цель достигается тем, to что вторая катушка управляемого механического тормоза подключена одним выводом к одной из диагоналей выпрямительного моста, а другим - к выходу блока электродинамического торможения . На чертеже представлена блок-схема предлагаемого устройства торможения электровоза. Устройство содержит датчик 1 минимального тока, подключенный к контакт ной сети 2, выходы которого соединены с одним из выводов обмотки 3 якоря тягового двигателя и с входом блокавключения. Другой вывод обмотки 3 якоря подключен к диагонали выпрямительного моста 5, в другую диагональ которого включена цепь из обмотки 6 возбуждения и катушки 7 управляемого механического тормоза. Устройство содержит также блок 8 э/ ектродинамического торможения и катушку 9 управляемого механического тормоза. Устройство работает следующим образом. При снижении напряжения в контактной сети 2 или уменьшении сопротивления движению поезда величины тока, протекающего через датчик 1 минимального тока уменьшается до порогового значения. Датчик 1 минимального тока срабатывает и включается блок Ц включения. По цепи: блок 4 включения блок 8 электродинамического торможения - катушка 9 управляемого механического тормоза, протекает ток. При переходе тягового двигателя из двигательного режима в генераторный и наоборот и включенном блоке включения токи, протекающие через катушку 7 и катушку 9 механического тормоза, различны и их величины определяются .значениями напряжения в контактной сети 2 и электродвижущей силы тягового двигателя. Например, при равенстве электродвижущей силы тягового двига теля и напряжения, приложенного к блоку 8 электродинамического торможения, ток, протекающий через катушку
механического тормоза, равен нулю, в то время, как в катушке 9 не равен нулю. Привод электровоза работает в режиме свободного выбега и электровоз не затормаживается и продолжает движение с заданной скоростью. При величинах напряжения питания контактной сети 2 и электродвижущей силы тягового двигателя, обуславливающих снижетока в катушках 7 и 9 механического тормоза ниже пороговых величин, происходит срабатывание механического тормоза. Электровоз останавливается. Обрыв цепей обмотки 3 якоря, тягового двигателя и блока 8 электродинамического торможения приводит к автоматическому срабатыванию механического тормоза, так как обесточиваются катушки 7 и 9 механического тормоза. При снятии напряжения питания в контактной сети 2 обесточивается датчик 1 минимального тока, включается блок 4 включения, подключается параллельно цепи обмотки 3 якоря тягового двигателя блок 8 динамического торможения. Привод электровоза работает в режиме д 1намического торможения. При уменьшении токов в катушках 9 и 7 управляемого механического тормоза ниже пороговых значений срабатывает механический тормоз и электровоз останавливается. Последовательное включение обмотки 6 возбуждения тягового двигател/1 и катушки 7 механического тормоза через выпрямительный мост 5 с обмоткой 3 якоря тягового двигателя необходимо для создания неизменного по направлению магнитного потока двигателя и согласного включения катушек 7 и 9 механического тормоза 8 случаереализации режима рекуперативного торможения. Для нормальной работы устройства необходимо, чтобы пороговое значение тока датчика 1 минимального тока было выше порогового значения тока катушки 9 управляемого механического тормоза. В качестве механического тормоза может быть установлен пневмомеханический тормоз с пневмовентилем включающего типа, имеющим двухобмоточную катушкууправления, воздействующий на тормозные колодки электровоза. В качестве тягового двигателя может быть использован сериесный или компаундный тяговые двигатели. Использование предполг}гаемого изобретения позволяет увеличить безопасность эксплуатации электровоза за
