I
Изобретение относится к средствам механизации вспомогательных работ в горных выработках, в частности к проходческим манипуляторам стреловидного типа, предназначенным для монтажа и демонтажа горношахтного оборудования, ремонта и погашения горных выработок, раЗборки завалов.
Известна телескопическая стрела манипулятора, включающая выдвижную часть со сменными подхватами и гидроцилиндр tl .
Недостаток такой стрелы заключается в ограниченности зоны ее действия.
Наиболее близким к предлагаемому изобретению по технической сущности и достигаемому результату является телескопическая стрела проходческого манипулятора, включающая неподвижную и подвижную секции и гидроцилиндр раздвижки, корпус которого связан посредством концевого шарнира с неподвижной секцией, а шток - с подвижной секцией t23.
Недостаток такой стрелы заключается в том, что рабочая зона ограничивается ее максимальной раздвижностью. Это обстоятельство вынуждает пользоваться в качестве дополни- . тельного оборудования тяговыми лебедками для выполнения работ за пределами действия телескопической стрелы.
Цель изобретения - повышение эффективности работы манипулятора за счет расширения его технологических возможностей.
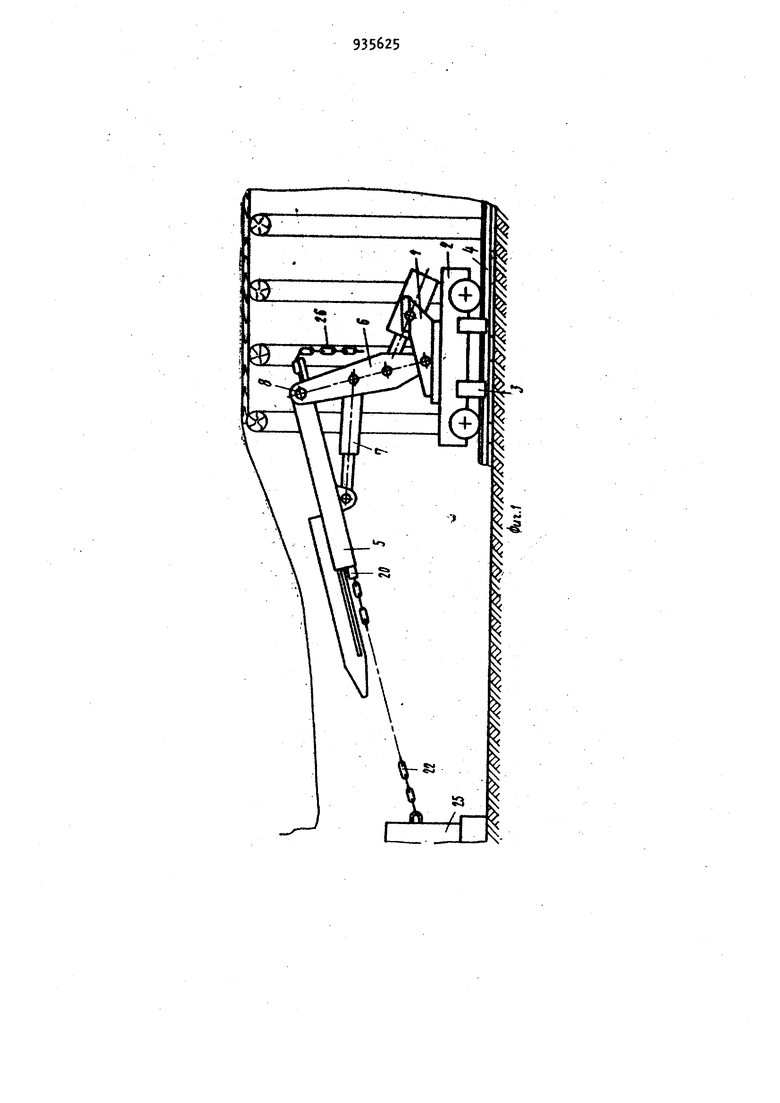
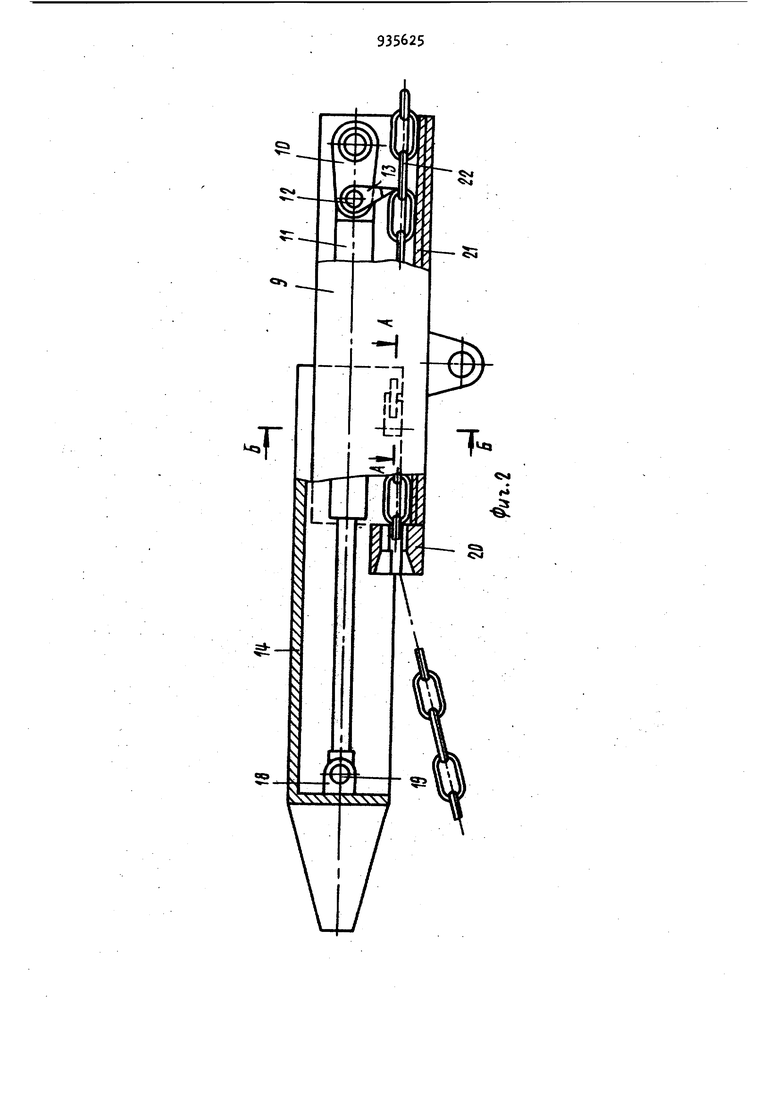
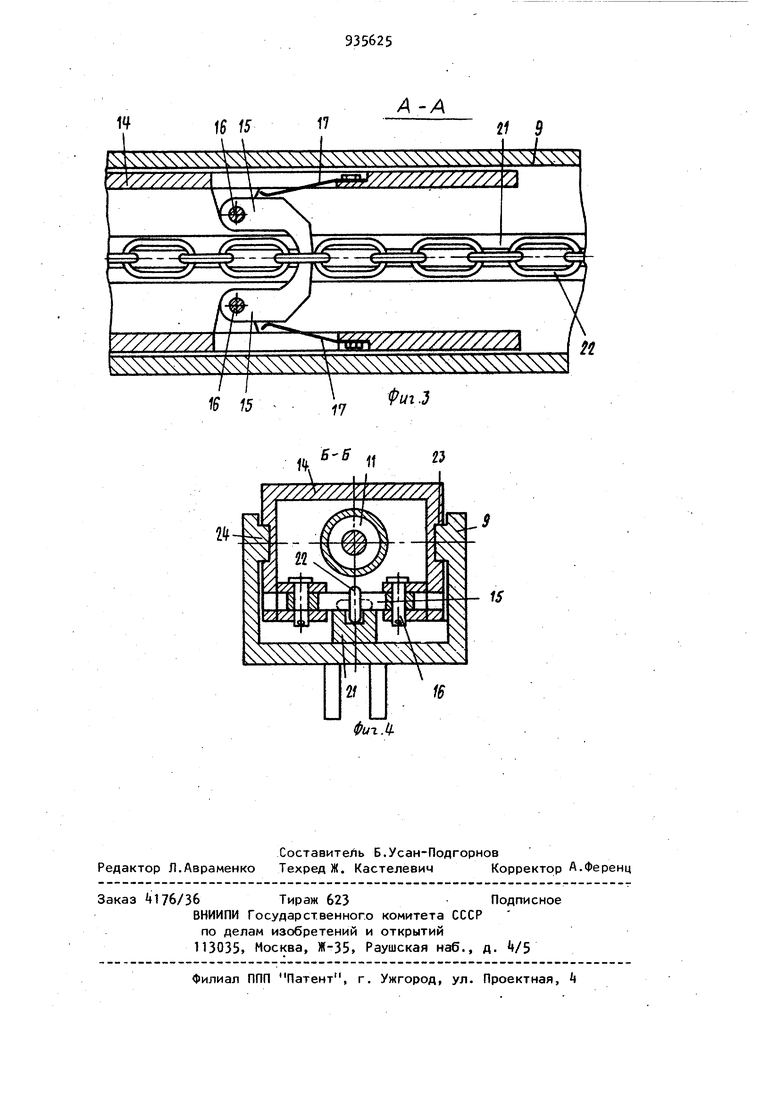
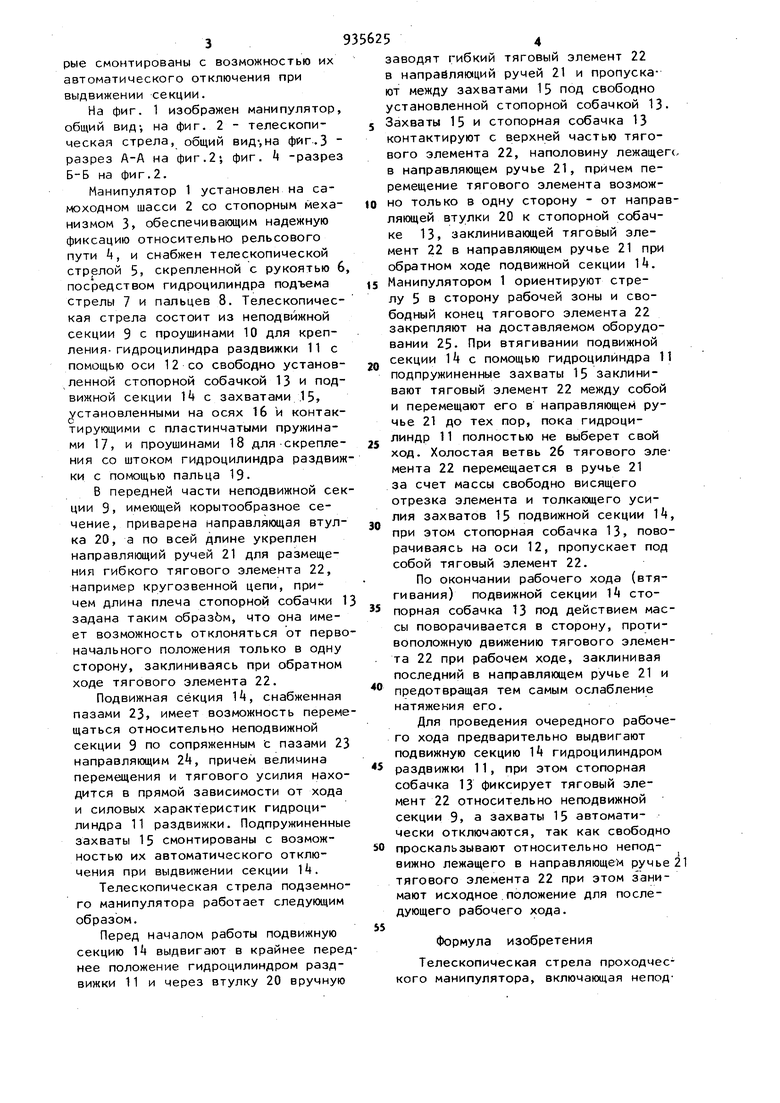
Это достигается тем, что неподвижная секция стрелы снабжена направляющей втулкой с ручьем и гибким тяговым элементом, который размещен в них, а концевой шарнир корпуса гидроцилиндра - стопорной собачкой, при этом подвижная секция стрелы .имеет подпружиненные захваты для заклинивания ягового элемента, которые смонтированы с возможностью их автоматического отключения при выдвижении секции. На фиг. 1 изображен манипулятор, общий ВИД , на фиг. 2 - телескопическая стрела, общий вид ,на фиг.3 разрез А-А на фиг.2; фиг. Д -разрез Б-Б на фиг.2. Манипулятор 1 установлен на самоходном шасси 2 со стопорным механизмом 3 обеспечивающим надежную фиксацию относительно рельсового пути 4, и снабжен телескопической стрелой 5, скрепленной с рукоятью 6 посредством гидроцилиндра подъема стрелы 7 и пальцев 8. Телескопическая стрела состоит из неподвижной секции 9 с проушинами 10 для крепления- гидроцилиндра раздвижки 11с помощью оси 12 со свободно установленной стопорной собачкой 13 и подвижной секции k с захватами .15, установленными на осях 16 и контактирующими с пластинчатыми пружинами 17, и проушинами 18 для скрепления со штоком гидроцилиндра раздвиж ки с помощью пальца 19. В передней части неподвижной сек ции 9, имеющей корытообразное сечение, приварена направляющая втулка 20, а по всей длине укреплен направляющий ручей 21 для размещения гибкого тягового элемента 22, например кругозвенной цепи, причем длина плеча стопорной собачки задана таким образЬм, что она имеет возможность отклоняться от перво начального положения только в одну сторону, заклиниваясь при обратном ходе тягового элемента 22. Подвижная секция 14, снабженная пазами 23, имеет возможность переме щаться относительно неподвижной секции 9 по сопряженным с пазами 23 направляющим 2k, причем величина перемещения и тягового усилия находится в прямой зависимости от хода и силовых характеристик гидроцилиндра 11 раздвижки. Подпружиненные захваты 15 смонтированы с возможностью их автоматического отключения при выдвижении секции . Телескопическая стрела подземного манипулятора работает следующим образом. Перед началом работы подвижную секцию выдвигают в крайнее перед нее положение гидроцилиндром раздвижки 11 и через втулку 20 вручную 4 заводят гибкий тяговый элемент 22 в напрайляю(ций ручей 21 и пропускают между захватами 13 под свободно установленной стопорной собачкой 13. Захваты 15 и стопорная собачка 13 контактируют с верхней частью тягового элемента 22, наполовину лежащег(. в направляющем ручье 21, причем перемещение тягового элемента возможно только в одну сторону - от направляющей втулки 20 к стопорной собачке 13, заклинивающей тяговый элемент 22 в направляющем ручье 21 при обратном ходе подвижной секции Н. Манипулятором 1 ориентируют стрелу 5 в сторону рабочей зоны и свободный конец тягового элемента 22 закрепляют на доставляемом оборудовании 25. При втягивании подвижной секции 14 с помощью гидроцилйндра 11 подпружиненные захваты 15 заклинивают тяговый элемент 22 между собой и перемещают его в направляющем ручье 21 до тех пор, пока гидроцилиндр 11 полностью не выберет свой ход. Холостая ветвь 2б тягового элемента 22 перемещается в ручье 21 за счет массы свободно висящего отрезка элемента и толкающего усилия захватов 15 подвижной секции 14, при этом стопорная собачка 13, поворачиваясь на оси 12, пропускает под собой тяговый элемент 22. По окончании рабочего хода (втягивания) подвижной секции 14 стопорная собачка 13 под действием массы поворачивается в сторону, противоположную движению тягового элемента 22 при рабочем ходе, заклинивая последний в направляющем ручье 21 и предотвращая тем самым ослабление натяжения его. Для проведения очередного рабочего хода предварительно выдвигают подвижную секцию 14 гидроцилиндром раздвижки 11, при этом стопорная собачка 13 фиксирует тяговый элемент 22 относительно неподвижной секции 9, а захваты 15 автоматически отключаются, так как свободно проскальзывают относительно неподвижно лежащего в направляющем ручье 21 тягового элемента 22 при этом занимают исходное.положение для последующего рабочего хода. Формула изобретения Телескопическая стрела проходческого манипулятора, включающая неподвижную и подвижную секции и гидроцилиндр раздвижки, корпус которого связан посредством концевого шарнира с неподвижной секцией, а шток с подвижной секцией.отличающаяся тем, что, с целью повышения эффективности работы манипулятора за счет расширения его техно логических возможностей, неподвиж ная секция стрелы снабжена направляющей втулкой с ручьем и гибким тя говым элементом, который размещен в них, а концевой шарнир корпуса гидроцилиндра - стопорной собачкой. 254 при этом подвижная секция стрелы имеет подпружиненные захваты для заклинивания тягового элемента, которые смонтированы с возможностью их автоматического отключения при выдвижении секции. Источники информации, принятые 8О внимание при экспертизе 1. Авторское свидетельство СССР № 705116, кл. Е 21 D 13/0, IS. 2. Авторское свидетельство СССР ff 133«45, кл. Е 21 О 13/0, I960 (прототип). IS 15
f. f АА 1 Риг J
16
Фиг Л 9
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство телескопического регулирования скребкового конвейера | 2002 |
|
RU2223212C1 |
| БУРОКРЕПЕЗАЧИСТНОЙ МОДУЛЬ | 1994 |
|
RU2079663C1 |
| Телескопический привод скребкового конвейера | 2002 |
|
RU2223211C2 |
| МОСТОВАЯ КОНСТРУКЦИЯ И МОСТОСБОРОЧНАЯ МАШИНА ДЛЯ ТРАНСПОРТИРОВКИ, СБОРКИ И УКЛАДКИ НА ПРЕГРАДУ МОСТОВОЙ КОНСТРУКЦИИ | 2001 |
|
RU2210656C2 |
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕДВИЖЕНИЕМ ПРОХОДЧЕСКОГО КОМБАЙНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2200842C2 |
| ПРОХОДЧЕСКИЙ КОМПЛЕКС ДЛЯ ПРОВЕДЕНИЯ ВСПОМОГАТЕЛЬНЫХ ВЫРАБОТОК | 2015 |
|
RU2599115C1 |
| РЫЧАЖНОЕ РАБОЧЕЕ ОБОРУДОВАНИЕ СТВОЛОВОЙ ПОГРУЗОЧНОЙ МАШИНЫ С УПРАВЛЯЕМЫМ ГРЕЙФЕРОМ | 2008 |
|
RU2380542C1 |
| Механизм перемещения секций телескопической стрелы | 1986 |
|
SU1368255A1 |
| МАШИНА ДЛЯ ПОДДИРКИ ГОРНЫХ ВЫРАБОТОК | 2000 |
|
RU2176735C2 |
| ТЕЛЕСКОПИЧЕСКОЕ УСТРОЙСТВО СКРЕБКОВОГО КОНВЕЙЕРА | 2001 |
|
RU2209756C2 |