Изобретение относится к подъемно- транспортному машиностроению,, а именно к манипуляторам увеличенного радиуса действия.
Цель изобретения - повьппение надежности работы.
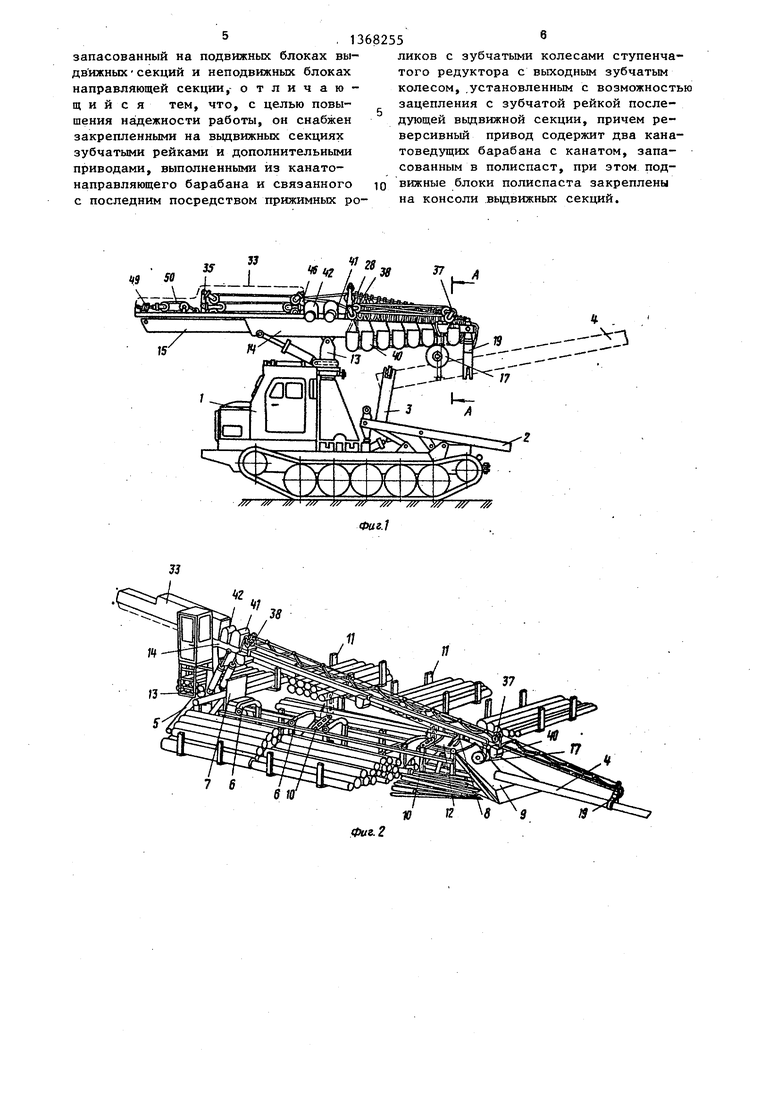
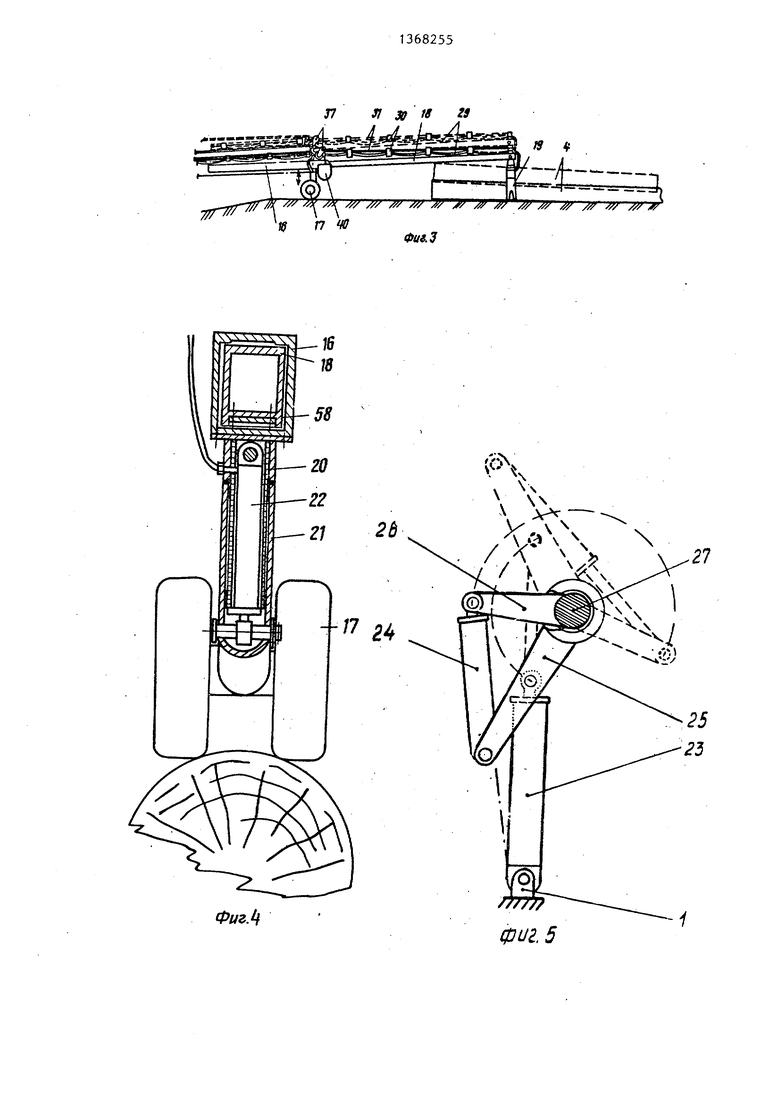
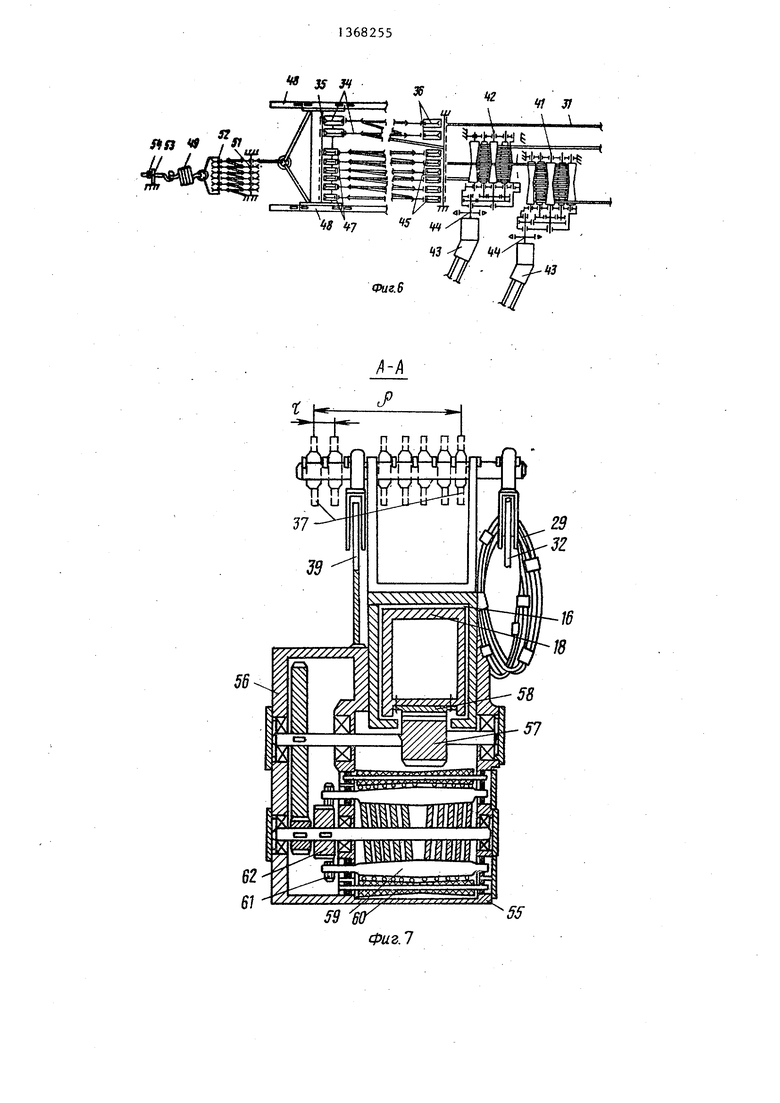
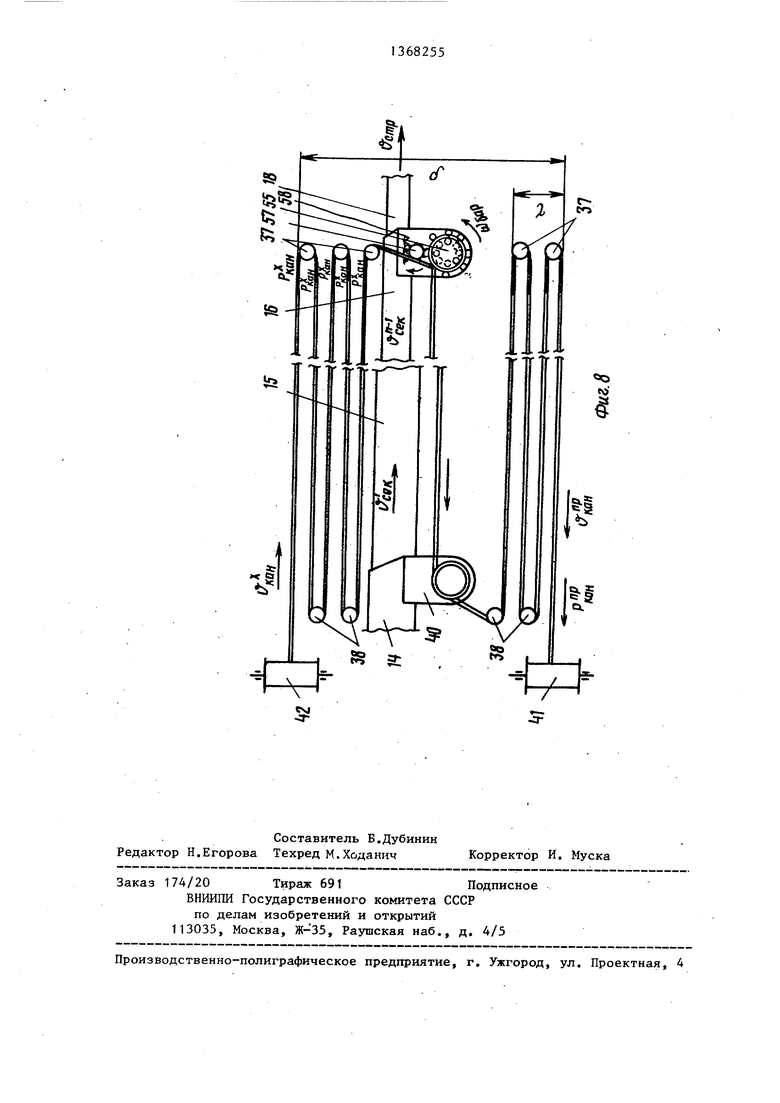
На фиг. 1 изображен телескопический манипулятор, установленный на трелевочном тракторе, общий вид; на фиг, 2 - технологическая схема применения манипулятора на раскряжевоч- но-сортировочно-пакетирутощем агрегате; на фиг. 3 - консольная часть стрелы манипулятора при выдвинутых секциях на максимальный радиус действия стрелы; на фиг. 4 - опорное колесо с механизмом выдвижения колеса от стрелы и поворотной осью; на фиг. 5 - схема поворотного устройства; на фиг. 6 - схема общего реверсивного привода каната полиспаста с устройством полиспастного типа; на фиг. 7 - разрез А-А на фиг. 1; на фиг.8 - схема вьщвижения секций с противоположными направлениями движения каната и секций; на фиг.9 - схема втягивания секций.
Телескопический манипулятор установлен на агрегате 1 подвижного или стационарного типа, например, на трелевочном тракторе с щитом 2 и трососъемником 3 дпя увязки и удер.- жания хлыстов 4 на щите трактора. На раскряжевочно-сортировочно-паке- тирующем агрегате 1 манипулятор ус- тановл н на безфундаментной раме 5 (для упрощенного монтажа и перевозки агрегата) с приемным столом 6, упором 7, зажимом 8 и наклонной направляющей 9 для подтаскивания и фиксации хлыста 4, с пильньми блоками 1 для раскряжевки хлыста и последукнцей укладки сортиментов в лесонакопйте- ли 11, со сбрасывателем 12 для вер- шинок хлыста.
Манипулятор состоит из поворотного устройства 13, подъемной направляющей 14 для консольного закрепления подвижных секций 15. На консольной части стрелы к подвижной секции 16 прикреплено опорное колесо 17,а к конечной секции 18 - захват 19. Опорное крлесо 17 выполнено из пары колес с поворотной осью из труб 20 и 21, которые смещены от оси вращения колес 17. Колеса 17 оснащены механизмом выдвижения колеса от стрелы, который выполнен в виде гид
Г
0
5
роцилиндра 22, размещенного внутри труб 20 и 21.
Поворотное устройство 13 выполнено из последовательно расположенных гидроцилиндров 23 и 24. Гидроцилиндр 23 прикреплен к раме агрегата 1 и к кронштейну 25, а гидроцилиндр 24 - к этому же кронштейну 25 и к кронштейну 26, который соедине н с опорным валом 27 поворотного устройства 13.
Силовая передача 28 привода захвата 19 и гидроцилиндра 22 - механизма выдвижения опорного колеса 17 от стрелы - выполнена из пучков ибких трубопроводов 29, которые подвешены с помощью скоб 30 на канатной направляющей 31. Канат направляющей 31 соединен с конечной секцией 18 и через поддерживающие блоки 32 - с устройством 33 полиспастного типа. В устройстве 33 установлены подвижные блоки 34 на каретке 35 и неподвижные блоки 36 На подъемной направляющей 14 секции.
Манипулятор оснащен механизмом привода секций, который содержит направляющую 14 и подвижные секции 15 телескопической стрелы, полиспаст с подвижными блоками 37 на секции 16 и неподвижнь1ми блоками 38 на направляющей 14.
На ветви полиспаста, которая вы5 ведена с помощью блоков 39 из верхнего положения вниз под телескопическую стрелу, размещены последовательно дополнительные приводы подвижных секций 40. Общий реверсивный
0 привод каната в полиспасте выполнен из пары отдельньЬс канатоведущих барабанов 41 и 42 (для изменения направления движения каната на выдвижение и втягивание секций) с отдель5 ными редукторами и гидромоторами 43, причем на валу гидромоторов 43 установлены тормоза 44 для полного останова каната и фиксации секций.
Запасовка и выдача каната при непрерывном его движении осуществляется с помощью устройства 33 полиспастного типа, которое выполнено из неподвижных блоков 45 на стойке 46 направляющей 14 секции и из подвижных блоков
47на каретке 35.
Движение каретки 35 по швеллерам
48направляющей 14 осуществлено под действием холостого усилия натяжения в канате полиспаста при выдвижении
0
0
55
секций стрелы и под действием пружины 49 при втягивании секций. Пружина 49 соединена с кареткой 35 дополнительным полиспастным устройством 50 с неподвижными 51 и подвижньми 52 блоками для ограничения хода пружины 49. 49 прикреплена к упору 53 направляющей 14 с помощью резьбового соединения 54 для регулировки усилий натяжения в канатах устройства 33 полиспастного типа и холостого усилия в канате полиспаста.
Дополнительный привод подвижной секции 40 выполнен из канатонаправ- ляющего барабана 55, редуктора 56, шестерни 57, зубчатой рейки 58 подвижной секции 18. Канатонаправляющий барабан 55 выполнен из роликов 59, расположенных по окружности барабана 55, на которые запасован вручную канат, с местонахождением набегающей или сбегающей ветвей каната выше оси вращения барабана 55 для четной ступенчатости редуктора 56 или ниже оси вращения барабана при нечетной ступенчатости редуктора 56. Канат зафиксирован на роликах 59 с помощью прижимных резиновых роликов 60. Ролик 59 общим валом жестко связан с шестерней 61, которая зацепена с суммирующей шестерней 62, соединяющей все ролики 59 барабаа 55. С шестерни 62 вращающий моент через шестерню и колесо редуктора 56 передается на шестерню 57, оторой приведена зубчатая рейка 58 , екции 18. Барабаны 41 и 42 выполнены аналогично барабану 55.
0
5
0
5
0
5
няют увеличенный контур полиспаста с выдвигающими подвижными блоками 37, причем часть кратности п полиспаста заполняют через ветвь с приводами подвижных секций 40, чем увеличивают скорость прохождения каната по барабанам 55 по сравнению со скоростью привода каната на канатове- дущем барабане 41, а значит увеличивают общую скорость выдвижения секций и блоков 37.
Отсюда, частью кратности п полиспаста работают как разновидностью полиспаста для выигрыша в скорости, она является изменяющей характеристикой, ее суммируют с постоянной характеристикой взаимодействия каната с приводами секций 40. При минимальной кратности полиспаста (р 2; п 0) работу полиспаста на вьщви- жение секций практически не учитывают ввиду.соотношения усилий в грузовых и холостых ветвях каната полиспаста в десятки до сотни раз, поэтому вьщвигают не только секции, но и небольшой груз на консоле стрелы.
Операция втягивания подвижных секций происходит следующим образом.
Включают канатоведущий барабан 42. Приводным усилием в канате барабана 42 образуют в части кратности п полиспаста суммарное тяговое усилие для втягивания секций. Причем скорость стягивания секций тихоходна ввиду того, что канат .выбирают сначала из части кратности р - п полиспаста и только после этого оставшая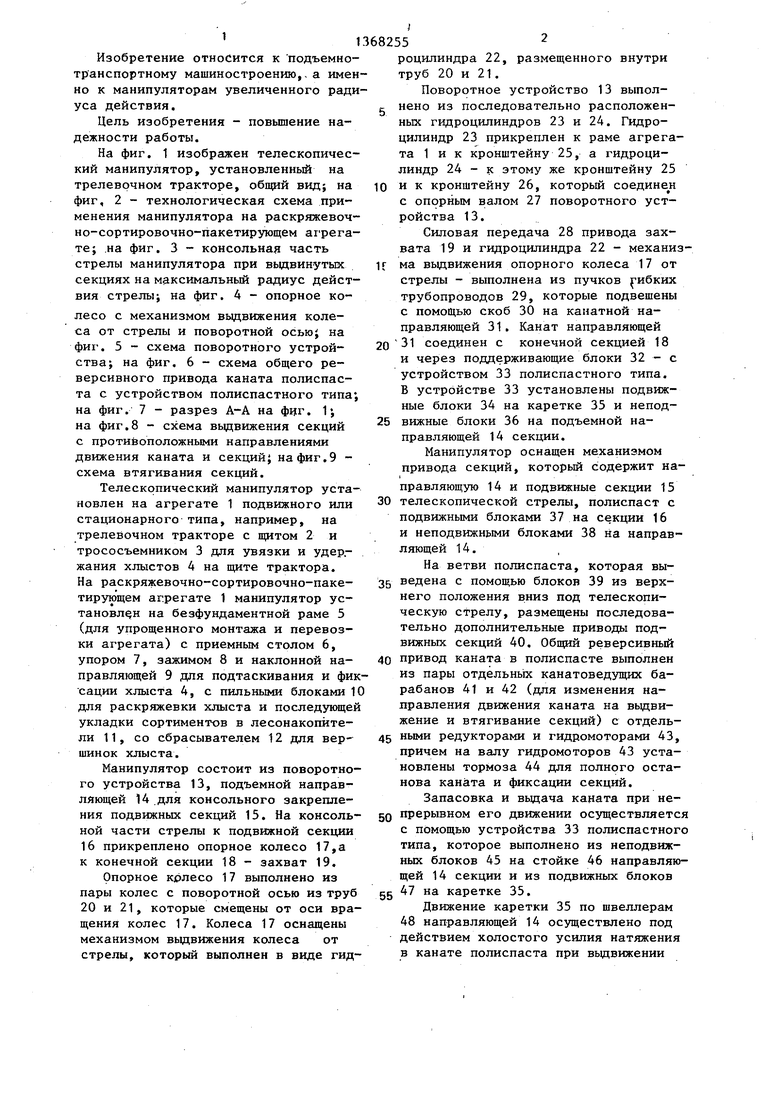

| название | год | авторы | номер документа |
|---|---|---|---|
| Самоходная лебедка для лесосплавных работ | 1984 |
|
SU1331815A1 |
| Телескопическая стрела | 1987 |
|
SU1532533A1 |
| УСТАНОВКА ДЛЯ ПОГРУЖЕНИЯ СВАЙ ИЛИ ШПУНТА | 2000 |
|
RU2158804C1 |
| Грузоподъемное устройство | 1985 |
|
SU1375558A1 |
| ТЕЛЕСКОПИЧЕСКАЯ СТРЕЛА КРАНА | 1991 |
|
RU2025456C1 |
| Манипулятор | 2024 |
|
RU2833644C1 |
| КОНВЕЙЕР ЛЕНТОЧНЫЙ | 2008 |
|
RU2362723C1 |
| Манипулятор лесной машины | 2024 |
|
RU2831151C1 |
| Грузоподъемный кран | 1985 |
|
SU1324993A1 |
| Телескоп кассетный ленточный | 2024 |
|
RU2828312C1 |
Изобретение относится к подъемно-транспортному машиностроению, а именно к манипуляторам увеличенного радиуса действия. Цель изобретения - повьшение надежности в работе. Телескопический манипулятор установлен на агрегате и состоит из поворотного устройства, подъемной направляю« щей 14 для консольного закрепления подвижных секций 15 и 16, полиспаста с подвижными блоками 37 на секции 16 и неподвижными блоками 38 на направляющей 14. На ветви полиспаста, которая выведена с помощью блоков из верхнего положения вниз под телескопическую стрелу, размещены последовательно дополнительные привода подвижных секций 40. Обсций реверсивный привод каната выполнен из пары отдельных кана- товедущих барабанов 41 и 42 для изменения направления движения каната на выдвижение и втягивание Секций, с отдельными редукторами и гидромоторами. Постоянной характеристикой взаимодействия каната ветви полиспаста с дополнительными приводами секций 40 является направление движения каната и секций, которая вьфажает либо выигрьш в скорости движения секций и потерей в усилии движения секций,либо выигрьш в усилии движения секций и потерей в скорости. 9 ил. i СЛ со О5 00 tc СЛ СЛ
Операция вьщвижения подвижных сек- 40 скорость привода каната на барабане 42 приводит дополнительные приводы секций 40.
ций осуществляется следующим образом
Включают канатоведущий барабан 41 и протягивают канат по блокам 37 и 38 полиспаста. Канат полиспаста отводят с помощью блоков 39 в ветвь с приводами подвижных секций 40, чем обеспечивают выдвижение секций стрелы и подвижных блоков 37 полиспаста. Холостую ветвь каната полиспаста отводят с барабана 41 в устройство 33 полиспастного типа, протягивают по блокам 45, 47 и затем через барабан 42 вьздают обратно в полиспаст.
Приводным усилием в канате на барабане 41 образуют в части кратности п полиспаста на подвижных блоках 37 суммарное усилие сопротивления вьщвижению секций. Канатом из устройства 33 полиспастного типа запол скорость привода каната на барабане 42 приводит дополнительные приводы секций 40.
Отсюда, частью кратности р-п полиспаста работают как разновидностью
полиспаста для выигрьш1а в силе. Она является изменяющей характеристикой, ее суммируют с постоянной характеристикой взаимодействия каната с приводами секций 40. При минимальной кратности полиспаста (р 2; п 0) работу полиспаста для выигрьша в силе сохраняют и транспортируют крупный груз к агрегату.
Формула изобретения
Механизм перемещения секций телескопической стрелы, содержащий полиспаст с реверсивным приводом и канат.
запасованный на подвижных блоках вы- дв илсных секций и неподвижных блоках направляющей секции, отличающийся тем, что, с целью повы- шения надежности работы, он снабжен закрепленными на вьщвижных секциях зубчатыми рейками и дополнительными приводами, выполненными из канато- направляющего барабана и связанного с последним посредством прижимных Л
7 6
ликов с зубчатыми колесами ступенчатого редуктора с выходным зубчатым колесом, .установленным с возможность зацепления с зубчатой рейкой последующей вьщвижной секции, причем реверсивный привод содержит два кана- товедущих барабана с канатом, запа- сованным в полиспаст, при этом подвижные блоки полиспаста закреплены на консоли вьщвижных секций.
/f/ fff /f
V /// /№
Л
-n/ - jT A // /7/ /// Af / / / //у 1(У / У ///if
rj 40
Фие.З
+
ФигМ
/У
11
2Ь
фиг, 5
ff 3S ff
ЛЯ f
S «745 i
S9 W
Фиг.7
43 / «V
«J
fPue.6
5ff
«о
о
| Рабочее оборудование гидравлических стреловых самоходных кранов, обзорная информация | |||
| М.: ЦНИИТЭ- строймаш, 1976, с | |||
| Способ образования коричневых окрасок на волокне из кашу кубической и подобных производных кашевого ряда | 1922 |
|
SU32A1 |
