(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СБОРОЧНЫМ
: , :
Изобретение относится к робототехнике и может быть использовано nps создании копирующих манипулятеч, осуществляющих сбсфочные операции.
Известно устройство для управй«ивя сборочным манипулятором, содержа вее аадатчик сигнала, блок сравнения, .ель, блок кс фекции, коммутатор, привод и объект регулирования Cl.l
Однако устройство не обеспечивает ю регулирование сборочного усилия.
Наиболее близким по технической сущности к предлагаемому 5голяется устройство, содержащее последовательно . соединенньте задатчик скорости, первый 15 сумматор, первый усилитель и первый блок коррекции, а также последователь-но подключенные эадатчик усилия, второй сумматор, второй блок когфекции, второй усилитель, коммутатор и привод, cse- 20 занный через исполнительный механизм с датчиком скорости и датчиком усилия, выходы которых соединены с вторыми входами первого и второго сумматоров МАНИПУЛЯТОРОМ
соответственно, а выход левого блока ко1фекаин подключен к второму входу комл татсчра 2.
Недостатюэм этого устройства являи ется невоз «ожность ограничения скороо ТВ.. движения при контакте устройства с псввяжным предметом, т.е. при стол каовенш исполнительного механизма с предметом, коториый йе имеет ограничеяк вости движения.
Цель изобретения - расширение функциональных возможностей устройства.
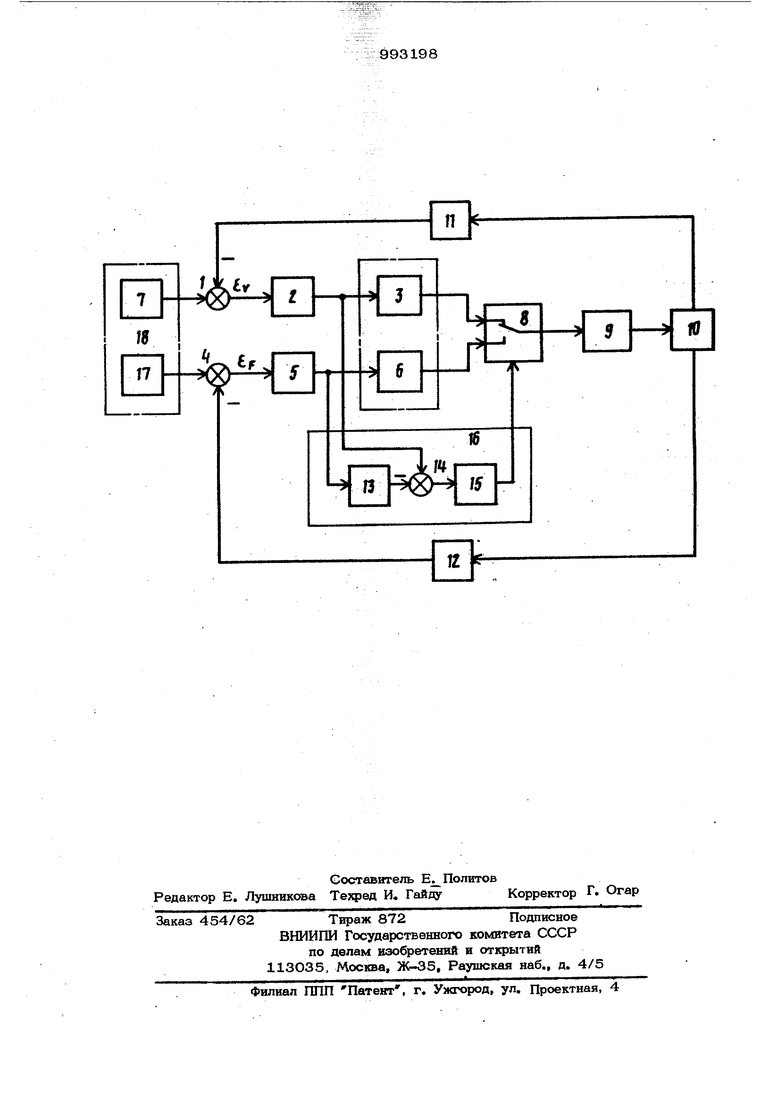
Устройство дополнительно содержат последовательно соединенные инвертор, третий сумматор и злемеиг с односторонней проводимостью, выходом подключен ный к третьему входу коммутатора, вххщ инвертора соединен с выходом второго усилителя, а втсфой вход третьего суммат фа подключен к выходу первого ус лителя.
На чертеже представлена функциональная схема устройства. Ус ipoflcfBo содержит первый суммато 1, первый усилитель 2, первый блок 3 коррекции, второй сумматор 4, второй усилитель 5, второй блок 6 коррекции, задатчик 7 скорости, коммутатор 8, привод 9, исполнительный механизм О, датчик 11 скорости, датчик 12 усилия, инвертор 13, третий сумматор 14, элемент 15 с односторонней проводимостью, селектор 16, задатчик 17 усилия, задающий орган 18, Устройство работает следующим образом. С задатчика 7 скорости поступает сигнал на отработку приводом 9 заданной скорости для исполнителбного механизма 10. Исполнительный механизм 1О представляет собой исполнительный орган манипулятора, содержащий силовой редуктор, схват и т.д. Этот сигнал, вычитая сигнал с датчика 11 скорости, поступает через усилитель 2, блок 3 коррекции, и коммутатор 8, на привод 9. При контакте исполнительного механизма 1О манипулятора с неподвижным предметом или при осуществлении этапа сборочной операции контактируемых деталей, с помощью селектора 16 через коммутатор 8 происходит переключение работы привода 9 с режима управления скоростью на режим управления усилием т.е..сигнал с задатчика 17 усилия,ычитая сигнал датчика 12 усилия, поступае через усилитель 5, блок 6 коррекции и коммутатор 8 на привод 9. Переключени режимов работы коммутатором 8, представляющим собой управляемый ключ с нормально замкнутым и нормально разомкнутым контактами, производит селе тор 16, в который поступают сигналы ошибок управления по скорости и по уси лию, усиленные соответственно усилителями 2 и 5, Селектор 16 коммутатором 8 включает тот канал управления, в тот канал управления, котором величина сигнала ошибки являет ся минимальной, -f.e. через коммутатор 8 проходит величина, меньшая из ошибо по скорости и усилию. Например, при движении с постоянной скоростью меньшей будет величина сигнала ошибки по скорости при контакте с неподвижным предметом меньшим сигналом будет оши ка по усилию. Сигнал ошибки по скорост подключен к нормально замкнутому контакту коммутатора 8, Инвертор 13 служит для инверсии знака сигнала ошибки по усилию. В сумматоре 14 происходит J вычитание сигналов ошибок, и эта разность через элемент 15 с односторонней проводимостью поступает на управляющий вход коммутатора 8, который срабатывает на любой по величине сит нал, например, положительный. Если же в каналах управления скоростью и усилием возможно перерегулирование, т.е. отрицательные значения ошибок по скорости и усилию, то коммутируется тот канал управления, в котором есть перерегулирование. Если же возможен случай обоих отрицательных сигналов, то селектор 16 обеспечивает прохождение сигнала ошибки по усилию, так как превышение заданного усилия более опасно, чем превышение заданной скорости. Применение предлагаемого устройства позволит расширить функциональные возможности устройства за счет обеспечения режима работы на подвижном упоре. Формула изобретения Устройство для управления сборочным манипулятором, содержащее последовательно соединенные задатчик скорости, первый сумматор, первый усилитель и первый блок коррекции, а также последовательно подключенные задатчик усилия, второй сумматор, второй блок коррекции, второй усилитель, коммуа атор, и привод, связанный через дополнительный механизм с датчиком скорости и датчиком усилия, выходы которых соединены с вторыми входами первого и вторюгор сумматоров соответственно, а выход первого блока коррекции подключен к ъторому входу коммутатора, о т л и ч а ю ш е е с я тем, что, с целью расширения функциональных возможностей устройства, оно содержит последовательно соединенные инвертор, третий сумматор и элемент с односторонней проводимос ью,выходомподк ченныйк ретьему коммутатора, вход инвертора со динен с выходом второго усшАтеля, а второй вход третьего сумматора подключен к выходу Первого усилителя. Источники информации, принятые во внимание при экспертизе 1,Авторское свидетельство СССР № 6242ОЗ, кл, G 05 В 11/ОО, 1980. 2.Авторское свидетельство СССР по заявке № 2940787/18-24-, кл, G 05 В 11/Ои, 1Э8О (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления сборочным роботом | 1983 |
|
SU1091115A1 |
| Устройство для управления сборочным роботом | 1986 |
|
SU1315297A1 |
| Устройство для управления сборочным манипулятором | 1980 |
|
SU930228A1 |
| Устройство для управления манипулятором | 1985 |
|
SU1290247A1 |
| Устройство для управления манипулятором | 1985 |
|
SU1321582A1 |
| Устройство для управления манипулятором | 1990 |
|
SU1717338A1 |
| Устройство для управления манипулятором | 1983 |
|
SU1229719A1 |
| Устройство для управления сборочным манипулятором | 1987 |
|
SU1495117A1 |
| Устройство для управления сборочным роботом | 1986 |
|
SU1421529A1 |
| Устройство для управления промышленным роботом | 1984 |
|
SU1264137A1 |