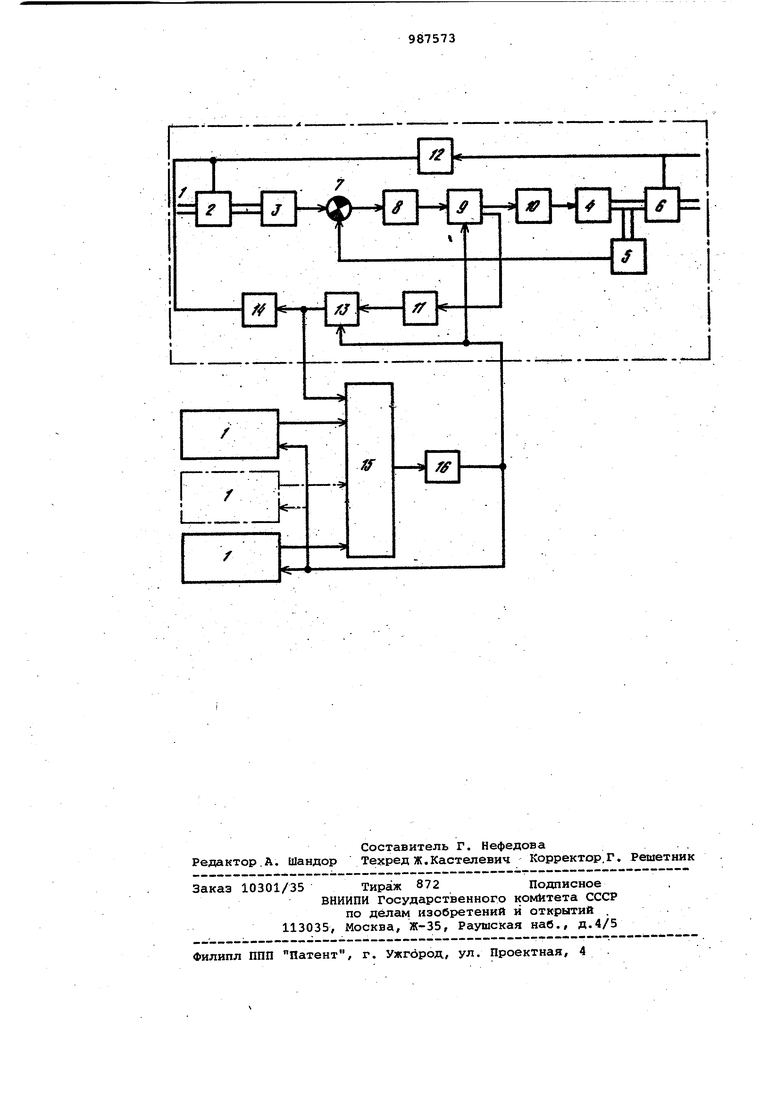
Изобретение относится к робототе нике и может.быть использовано при создании копирующих манипуляторов. Известно устройство для. управления копирующим манипулятором, содер жащфе датчики положения задающего и .исполнительного органа, датчики мо мента задающего и исполнительного о гана, сумматоры, усилители и привод Однако данное устройство обеспечивает согласования задающего испол нительного органов. Наиболее близким техническим решен ем к изобретению является устройство, содержащее по каждой регулируемой координате моментный загру тель, связанный с датчиком угла задающего органа, выход которого соединен с первым входом сумматора, вы ходом подключенного к входу усилите ля, а вторым входом - к выходу датчика .угла исполнительного органа, связанного с датчиком момента и двигателем, вход которого соединен с выходом усилителя мощности, а выход датчика момента через усилитель с регулируемой зоной нечувствительности подключен к входу моментного загружателя 2 , Недостатком известного устройства является невозможность согласования положения задакицего и исполнительного органов за счет перемещений задающего органа при неподвижнснл исполнительном органе. Целью изобретения является расширение функциональных возможностей устройства. Цель достигается тем, что устройство содержит последовательно соединенные элемент- И и элемент памяти и по каждой регулируемой координате последовательно соединенные ключ, нуль-орган, триггер и релейный усилитель, выход которого подключен к входу моментного загружателя, выход усилителя соединен с первым входом ключа, вторым выходом подключенного к входу усилителя мощности, выход элемента памяти соеди.нен с вторым входом каждого ключа и триггера, а выход каждого триггера подключен к соответствующему входу элемента И. На чертеже представлена функциональная схема устройства. Устройство содержит регулирующие координаты 1, моментный загружатель 2, датчик 3 угла задакяцего органа.
двигатель 4, датчик 5 угла исполнительного органа, датчик 6 момента сугчматор 7, усилитель 8, ключ 9, усилитель 10 мощности, нуль-орган 1 усилитель 12 с регулируемой зоной нечувствительности, триггер 13, релейный усилитель 14, элемент И 15, элемент 16 памяти.
Устройство работает следующим образом.
В исходном несогласованном сос;тоянии манипулятора все регулируеkbje координаты его разомкнуты по положению. Исполнительные двигатели 4 обесточены, а сигнал рассога-; сования с выхода сумматора 7 через усилители 8 и ключи 9 подается на выходы нуль-органов 11. При перемещении оператором звеньев задающего органа манипулятора и в момент совпадения углового положения любой соответствующей пары звеньев задающего исполнительного органов, когда сигнал рассогласования по этому движению равен нулю, на выходе нульоргана 11 появляется сигнал, переводящий триггер 13 в состояние, при ко тором сигнал с выхода триггера 13, пройдя через релейный усилитель 14, вызывает срабатывание моментного загружателя 2 и фиксирует тем самым положение .задающего органа и, еледовательно, согласованное положение соответствующей пары звеньев манипулятора.
Сигнал с выхода триггера 13 подается также на элемент И 15. При наличии на входах этой схемы сигнало с триггеров 13 всех координат, что соответствуетсогласованному положению всех пар звеньев задающего и ис.полнительного органов манипулятора, сигнал с выхода элемента И 15 через элемент 16 памяти подается на управляющие входы ключей 9, вызывая срабатывание последних, в результате чего происходит переключение выходов усилителей 8 с входом нуль-органов 11 на входы усилителей 10 мощности.
Одновременно сигнал с выхода элемента 15 памяти поступает на установочные входы триггеров 13, возвращая их.в исходное состояние. При этом присходит расфиксация всех осей задающего органа вследствие отключения моментных загружателей 2. Манипулятор согласован и готов к работе. Сброс элемента 16 памяти происходит при отключении питания.
Применение изобретения позволит путем перемещения звеньев задающего органа согласовывать взаимное положение задающего и положительного органов .
Формула изобретения
Устройство для управления копирующим манипулятором, содержащее по каждой регулируемой координате . моментный загружатель, связанный с датчиком угла задающего органа, вых которого соединен с первым входом сумматора, выходом подключенного к входу усилителя, а вторым входом к выходу датчика угла исполнительного органа, связанного с датчиком момента и двигателем, вход которого соединен с выходом усилителя мощности, а выход датчика момента через усилитель с регулируемой зоной нечувствительности подключен к входу моментного загружателя, отличают ее с я тем, что, с целью расширения функциональных возможностей устройства, оно содержит последовательно соединенные элемент И и элемент памяти и по каждой регулируемой координате последовательно соединенные ключ, нуль-орган, триггер релейный усилитель, выход которого подключен к входу моментного загружателя, выход усилителя соединен с первым входом ключа, вторым выходом подключенного к входу усилителя мощности, выход элемента памяти соедин с вторым входом каждого ключа и тригера, а выход каждого триггера подключен к соответствующему входу элемента И.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 582960, кл. В 25 j 13/00, 1976.
2.Авторское свидетельство СССР 1 317039, кл, G 05 В 11/00, 1970
(.прототип ).
.... g
ff
ff
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления копирующим манипулятором | 1982 |
|
SU1030769A1 |
| Следящая система с отражением усилия | 1977 |
|
SU643830A1 |
| Устройство для управления электромеханическим копирующим манипулятором | 1980 |
|
SU928297A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Устройство для управления манипулятором | 1984 |
|
SU1229728A1 |
| Система управления манипулятором | 1978 |
|
SU805245A1 |
| Устройство для управления копирующим манипулятором | 1980 |
|
SU935871A1 |
| Следящий электропривод с компенсацией люфта | 1981 |
|
SU981929A1 |
| Устройство для управления сборочным роботом | 1988 |
|
SU1650429A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
fj
ff
.J
FT
9
.b
