4 01
о со со
Изобретение относится к робототехнике и может быть использовано при создании копирующих манипуляторов для погрузочно- разгрузочных работ.
Целью изобретения является улучшение динамических характеристик устройства за счет уменьшения ускорений при трогании, переключении скоростей и остановке гидродвигателя.
На чертеже представлена функциональная схема устройства.
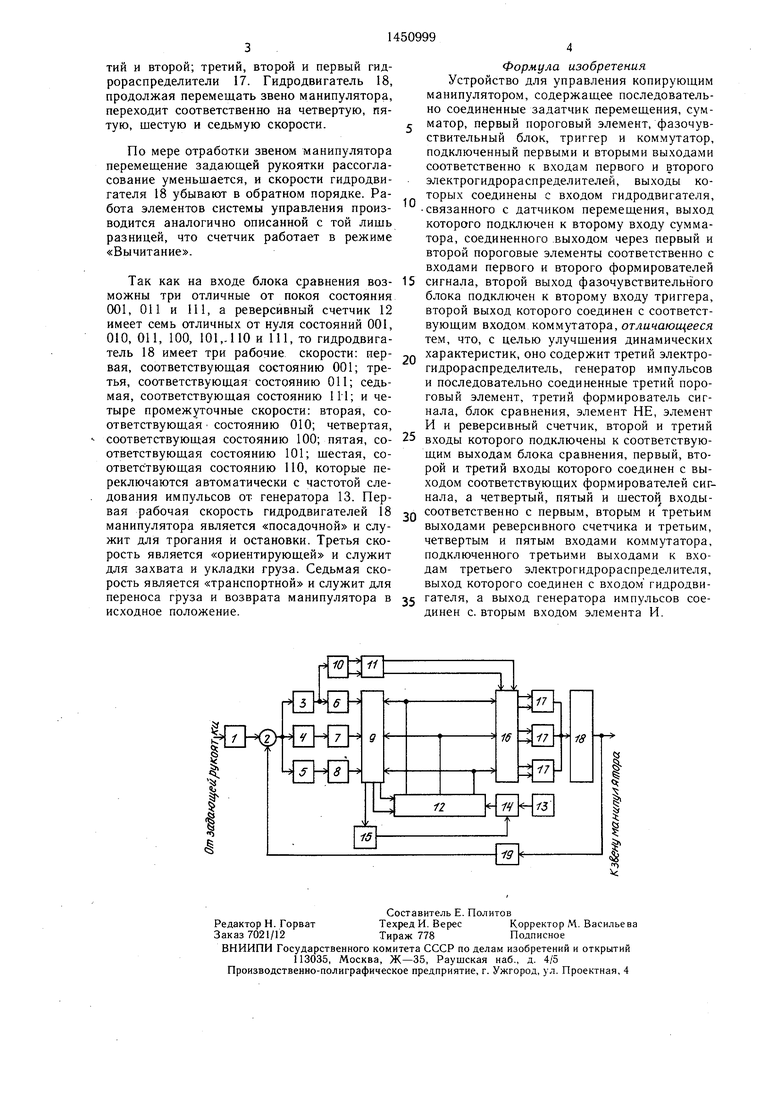
Устройство содержит задатчик 1 перемещения, сумматор 2, первый, второй и третий пороговые элементы 3-5, первый, второй и третий формирователь 6, 7 и 8 соответствен10
нератор 13 импульсов с реверсивным счетчиком 12.
Запущенный от импульса генератора 13 реверсивный счетчик 12 изменяет свое состояние на единицу: 001, число В становится равным числу А, в резульатате чего сигнал «Сложение на втором выходе блока 9 сравнения исчезает, а на первом выходе блока 9 сравнения появляется сигнал «Останов. Реверсивный счетчик 12 останавливается в состоянии 001. Выходные сигналы от реверсивного счетчика 12 поступают на вход коммутатора 16, который включает первый трех.- позиционный электроуправляемый гидрораспределитель 17. Позиция гидрораспределино, блок 9 сравнения, фазочувствительный 5 «Вперед или «Назад определяется
блок 10, триггер 11, реверсивный счетчик 12 генератор 13 импульсов, элемент И 14; элемент НЕ 15; коммутатор 16, электрогидрорас- пределители 17, гидродвигатель 18; датчик 19 перемещения.
коммутатором 16 в соответствии с выходным сигналом блока 10 определения направления движения. Первый трехпозиционный электроуправляемый гидрораспределитель 17 подключает полости гидродвигателя 18 к напоУстройство работает следующим образом 20 ру ц сливу, и в соответствии с включенной
позицией гидродвигатель 18 на первой скорости перемещает звено манипулятора вперед или назад.
При дальнейшем увеличении рассогласования между манипулятором и задающей рукояткой увеличивается выходной сигнал сумматора 2, срабатывает второй пороговый элемент 4. На входе блока сравнения 9 формируется состояние 010. Выходной сигнал от реверсивного счетчика 12 поступает на
В исходном положении задающая рукоятка и звено манипулятора согласно принципу копирования находятся в согласованном положении. Выходные сигналы задат- чика 1 и датчика 19 перемещения равны по 25 величине, а выходной сигнал сумматора 2 равен нулю. Пороговые элементы 3-5 закрыты. Триггер 11 находится в одном из двух своих состояний. Формирователи 6-8, блок 9 сравнения и реверсивный счетчик 12 находятся в нулевых состояниях. Элемент И 14 30 вход коммутатора 16, который выключает
закрыт. Выходы коммутатора 16 обесточены. Трехпозиционные электрогидрораспредели- тели 17 находятся в позиции «Заперто. Гидродвигатель 18 неподвижен.
При перемещении задающей рукоятки на выходе сумматора 2 появляется электричес- кий сигнал, пропорциональный рассогласованию положений задающей рукоятки и звена манипулятора. При увеличении выходного сигнала сумматора 2 срабатывает первый
первый и включает второй трехпозиционный электрогидрораспределитель 17 в ту же позицию, что и ранее включенный первый гидрораспределитель 17. Гидродвигатель 18 на второй скорости продолжает перемещение звена манипулятора в прежнем направлении.
Поскольку во втором состоянии 010 равенство чисел А и В не наступило, реверсивный счетчик 12 по команде следующего им- пороговый элемент 3. Выходной сигнал пер- 40 пульса, прибавив еще одну единицу, перехо- вого порогового элемента 3 поступает надит в состояние 011. Теперь и ревервход фазочувствительного блока 10 и триг-сивный счетчик 12 останавливается. Коммугера 11, которые формируют сигнал «Впетатор 16 включает параллельно второму гидрораспределителю 17 первый. Гидродвига- де тель 18.на третьей скорости продолжает перемещение звена манипулятора в прежнем направлении.
При дальнейщем увеличении рассогласования до срабатывания третьего порогового
В, поступивщим от реверсивного 50 элемента 5 на входе блока 9 сравнения формируется состояние 111. Блок 9 сравнения снова включает реверсивный счетчик 12 на сложение и тот последовательно с частотой импульсов генератора 13, принимает состояния 100, 101, 110 и 111, после чего останавливается. Коммутатор 16 выключает второй и первый Трехпозиционные электрогидрорас- пределители 17 и последовательно включает соответственно третий; третий и первый; треред или «Назад, поступающий далее на вход коммутатора 16, а также на вход формирователя 6. На выходе формирователя 6 появляется «1, а на входе блока 9 сравнения - число А, соответствующее состоянию 001.
Блок 9 сравнения сравнивает число А с числом
счетчика 12 и равным нулю в виду того, что предшествующее состояние реверсивного счетчика 12 соответствовало покою. Так как , на котором выходе блока сравнения 9 появляется сигнал «Сложение, поступающий далее на вход реверсивного счетчика 12, а на первом выходе - сигнал «Пуск, поступающий далее через элемент НЕ 15 на вход элемента И 14, который соединяет ге55
нератор 13 импульсов с реверсивным счетчиком 12.
Запущенный от импульса генератора 13 реверсивный счетчик 12 изменяет свое состояние на единицу: 001, число В становится равным числу А, в резульатате чего сигнал «Сложение на втором выходе блока 9 сравнения исчезает, а на первом выходе блока 9 сравнения появляется сигнал «Останов. Реверсивный счетчик 12 останавливается в состоянии 001. Выходные сигналы от реверсивного счетчика 12 поступают на вход коммутатора 16, который включает первый трех.- позиционный электроуправляемый гидрораспределитель 17. Позиция гидрораспределиT J i «Вперед или «Назад определяется
коммутатором 16 в соответствии с выходным сигналом блока 10 определения направления движения. Первый трехпозиционный электроуправляемый гидрораспределитель 17 подключает полости гидродвигателя 18 к напору ц сливу, и в соответствии с включенной
первый и включает второй трехпозиционный электрогидрораспределитель 17 в ту же позицию, что и ранее включенный первый гидрораспределитель 17. Гидродвигатель 18 на второй скорости продолжает перемещение звена манипулятора в прежнем направлении.
тий и второй; третий, второй и первый гидрораспределители 17. Гидродвигатель 18, продолжая перемещать звено манипулятора, переходит соответственно на четвертую, пятую, шестую и седьмую скорости.
По мере отработки звеном манипулятора перемещение задающей рукоятки рассогласование уменьщается, и скорости гидродвигателя 18 убывают в обратном порядке. Ра-i pu,. ч,,.пт плидит Irlмн ЛDrl aIt..п,
бота элементов системы управления произ- -связанного с датчиком перемещения, выход водится аналогично описанной с той лишь которого подключен к второму входу сумматора, соединенного выходом через первый и второй пороговые элементы соответственно с
Формула изобретения Устройство для управления копирующим манипулятором, содержащее последовательно соединенные задатчик перемещения, сумматор, первый пороговый элемент, фазочув- ствительный блок, триггер и коммутатор, подключенный первыми и вторыми выходами соответственно к входам первого и второго электрогидрораспределителей, выходы которых соединены с входом гидродвигателя.
разницей, что счетчик работает в режиме «Вычитание.
входами первого и второго формирователей
Так как на входе блока сравнения воз-15 сигнала, второй выход фазочувствительного
можны три отличные от покоя состоянияблока подключен к второму входу триггера,
001, 011 и 111, а реверсивный счетчик 12второй выход которого соединен с соответстимеет семь отличных от нуля состояний 001,вующим входом коммутатора, ог.лыча/оы{ееся
010, 011, 100, 101,.110 и 111, то гидродвига-тем, что, с целью улучщения динамических
тель 18 имеет три рабочие скорости: пер-j характеристик, оно содержит третий электровая, соответствующая состоянию 001; тре-гидрораспределитель, генератор импульсов
тья, соответствующая состоянию 011; седь-и последовательно соединенные третий поромая, соответствующая состоянию IM; и че-говый элемент, третий формирователь сигтыре промежуточные скорости: вторая, со-нала, блок сравнения, элемент НЕ, элемент
ответствующая состоянию 010; четвертая,И и реверсивный счетчик, второй и третий
соответствующая состоянию 100; пятая, со-25 входы которого подключены к соответствуюответствующая состоянию 101; щестая, со-щим выходам блока сравнения, первый, втоответс твующая состоянию 110, которые пе-рой и третий входы которого соединен с выреключаются автоматически с частотой еле-ходом соответствующих формирователей сигдования импульсов от генератора 13. Пер-нала, а четвертый, пятый и шестой входывая рабочая скорость гидродвигателей соответственно с первым, вторым и третьим
манипулятора является «посадочной и слу-выходами реверсивного счетчика и третьим.
жит для трогания и остановки. Третья скорость является «ориентирующей и служит для захвата и укладки груза. Седьмая скорость является «транспортной и служит для
четвертым и пятым входами коммутатора, подключенного третьими выходами к входам третьего электрогидрораспределителя, выход которого соединен с входом гидродвиi pu,. ч,,.пт плидит Irlмн ЛDrl aIt..п,
связанного с датчиком перемещения, выход которого подключен к второму входу сумматора, соединенного выходом через первый и второй пороговые элементы соответственно с
Формула изобретения Устройство для управления копирующим манипулятором, содержащее последовательно соединенные задатчик перемещения, сумматор, первый пороговый элемент, фазочув- ствительный блок, триггер и коммутатор, подключенный первыми и вторыми выходами соответственно к входам первого и второго электрогидрораспределителей, выходы которых соединены с входом гидродвигателя.
четвертым и пятым входами коммутатора, подключенного третьими выходами к входам третьего электрогидрораспределителя, выход которого соединен с входом гидродви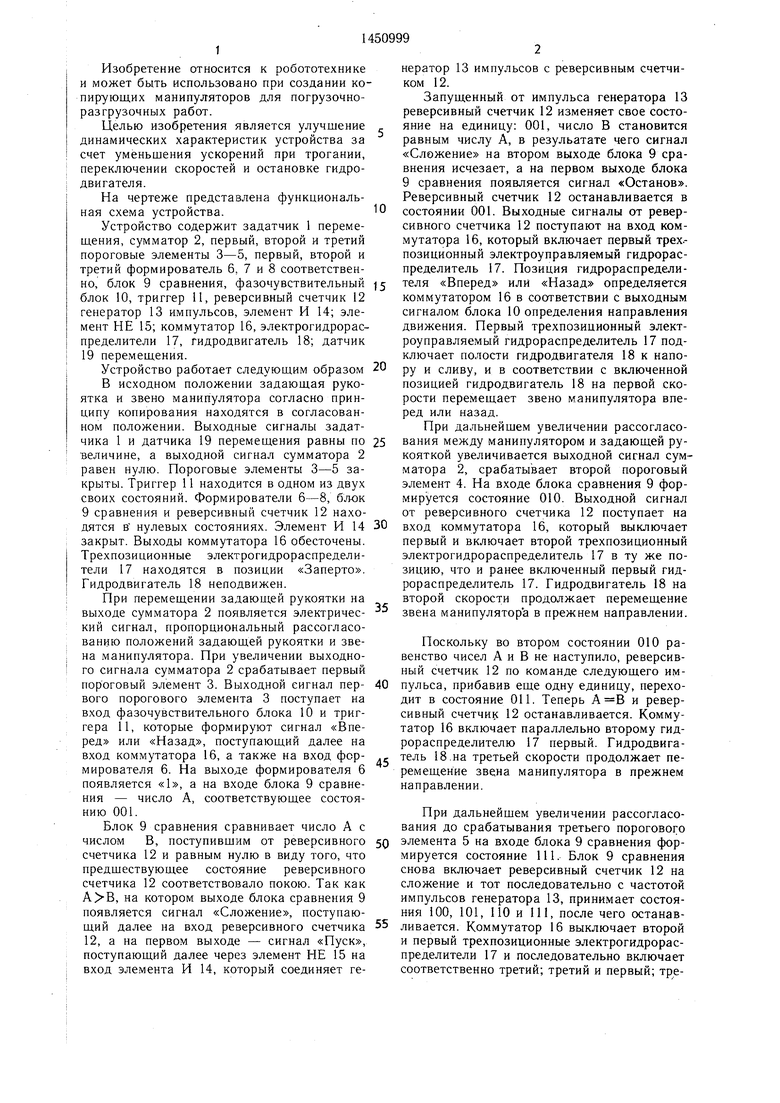
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления электрогидравлическим манипулятором | 1976 |
|
SU640841A1 |
| Система программного управления рабочим органом горной машины | 1981 |
|
SU960435A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2347950C1 |
| Устройство для срезания деревьев | 1985 |
|
SU1277928A1 |
| Электрогидравлическая система | 2021 |
|
RU2797330C2 |
| Электрогидравлическая система совмещенного управления строительной машиной | 1987 |
|
SU1502728A1 |
| Устройство управления электрогидрораспределителем горной машины в системе регулирования | 1986 |
|
SU1432215A1 |
| Электрогидравлическая система управления | 2018 |
|
RU2708477C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АВТОМАТИЧЕСКИМ ТРАНСПОРТНО-ПОГРУЗОЧНЫМ МАНИПУЛЯТОРОМ | 1990 |
|
RU2009883C1 |
| Электрогидравлический следящий привод | 1985 |
|
SU1269092A1 |
Изобретение относится к области робототехники и может быть использовано при создании копирующих манипуляторов для погрузочно-разгрузочных работ. Целью изобретения является улучшение динамических характеристик устройства за счет уменьшения ускорений при трогании, переключении скоростей и остановке гидродвигателя. Устройство содержит для каждой степени подвижности задатчик перемеш.ения, соединенный через сумматор с входами первого, второго и третьего пороговых элементов. Сигналы с пороговых элементов поступают далее через формирователи на блок сравнения. Сигнал с первого порогового элемента подается, кроме того, на фазочувстви ельный блок. На блок сравнения поступает также сигнал от реверсивного счетчика, запуск которого осуществляется от генератора импульсов через элемент И по команде от элемента НЕ. К выходам реверсивного счетчика и триггера, связанного с фоточувствительным блоком, подключен коммутатор, воздействую- ший на трехпозиционные электрогидрорас- пределители, управляющие работой гидродвигателя. Премещение гидродвигателя фиксируется датчиком перемещения. Устройство имеет три рабочие скорости и четыре промежуточные. 1 ил. (С (Л
переноса груза и возврата манипулятора в jj гателя, а выход генератора импульсов сое- исходное положение.динен с. вторым входом элемента И.
,
hT
| Исследование опытного образца манипулятора для разгрузки рефрижираторных вагонов в стендовых и производственных условиях | |||
| Отчет по НИР, 1984, ее | |||
| Капельная масленка с постоянным уровнем масла | 0 |
|
SU80A1 |
