(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКИМ КОПИР ТО1ЦИМ МАНИПУЛЯТОРОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления копирующим манипулятором | 1980 |
|
SU935871A1 |
| Устройство для управления копирующим манипулятором | 1981 |
|
SU987573A1 |
| Устройство для управления копирующим манипулятором | 1982 |
|
SU1030769A1 |
| Устройство для управления манипулятором | 1980 |
|
SU885968A1 |
| Устройство для управления дистанционным манипулятором | 1989 |
|
SU1834795A3 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ РОБОТА | 2002 |
|
RU2230349C2 |
| Обратимая следящая система | 1980 |
|
SU903800A1 |
| Следящая система с отражением усилия | 1977 |
|
SU643830A1 |
| Копирующий манипулятор | 1983 |
|
SU1093542A2 |
| Устройство для управления астатическим манипулятором | 1982 |
|
SU1037206A1 |
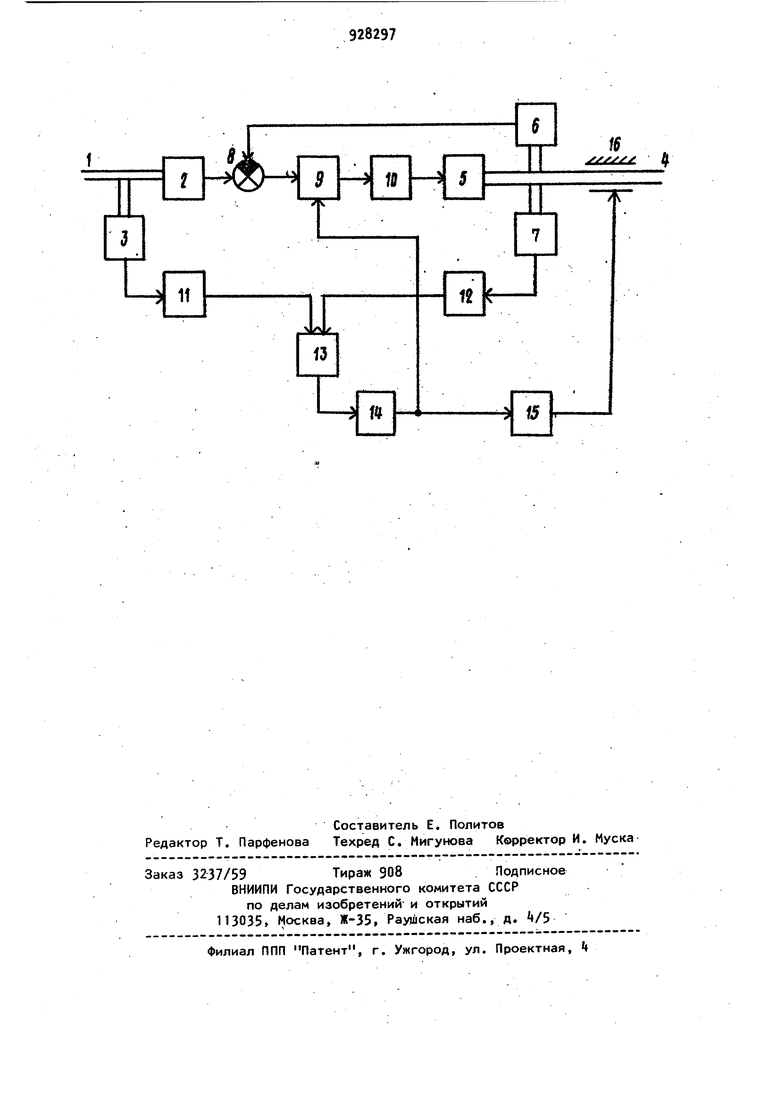
Изобретение относится к робототехнике и может быть использовано при создании копирующих манипуляторов.. Известны устройства для управления электромеханическим копирующим манипулятором, содержащие датчики момента датчик скорости, сумматор и электродвигатель, в режимах удержания потреб ляет большое количество энергииtl. Наиболее близким течническим решением к изобретению явrfяeтcя устройство, содержащее установленные на задающем органе первый датчик положения и первый датчик скорости и установлен ные на исполнительном органе электродвигатель, входом соединенный с выходом первого усилителя, второй датчик положения и второй датчик скорости, причем выходы первого и второго датчи ков положения подключены ко входам сумматора 2, Недостатком этого устройства является потребление большого количества энергии в режиме удержания и, как следствие, малый ресурс работы двигателя. Целью изобретения является улучшение эксплуатационных характеристик устройства за счет уменьшения потребляемой мощности и увеличения срока службы электродвигателя. Для достижения поставленной цели известное устройство содержит ключ, первый нуль-орган и последовательно соединенные второй нуль-орган, элемент И, элемент задержки, второй усилитель и механизм торможения, выходы первого и второго датчиков скорости подключены ко входам соответствующих нуль-органов, выход первого нульоргана соединен со вторым входом элемента И, а выход элемента задержки подключен к первому входу ключа, через второй вход которого выход сумматора соединен со входом первого усилителя. На чертеже представлена функциональная схема устройства. Устройство содержит задающий орган 1, первый датчик 2 положения, первый датчик 3 скорости, исполнитель ный орган Ц, электродвигатель 5, второй датчик 6 положения, второй датчик 7 скорости, сумматор 8, ключ 9, первый усилитель 10, первый и второй нуль-органы 11 и 12 соответственно, элемент И 13, элемент 1 задержки, второй усилитель 15, механизм 16 торможения. Устройство работает следующим ,9бразоМо При вращении задающего органа 1 на выходе сумматора 8 появляется сигнал рассогласования в виде разности выходных сигналов датчиков 2 и 6, к(9торый через ключ 9 поступает на вход первого усилителя 10 и далее на электродвигатель 5, вращающий исполнительный орган 4 в направлении устранения рассогласования. При этом сигналы, пропорциональные скоростям вращения задающего 1 и исполнительно го | органов, с выходов датчиков 3 и 7 скорости соответственно поступают на входы нуль-органов 11 и 12. В случае возникновения равновесного .состояния, характеризующегося неподвижным положением задающего 1 и исполнительного 4 органов,.когда внешние по отношению к рассматриваемому приводу силы уравновешиваются активным моментом электродвигателя 5, сигналы с выходов нуль-органов 11 иТ поступают на элемент И 13, вызь1вая появление сигнала на его выходе, под ключенном к элементу 14 С выхода элемента 14 полученный сигнал непосредственно поступает на управляющий вход ключа 9, разрывающего цепь пита
ния электродвигателя 5, а пройдя через второй усилитель 15, выполненный релейным, вызывает срабатывание механизма 16, фиксирующего положение исполнительного органа 4« Таким образом, происходит замена активного момента электродвигателя 5 тормозным моментом. Элемент 14 обеспечивает временную задержку прохождения сигнала с целью предотвращения чрезмерно частых срабатываний механизма 16 при мгновенных совпадениях нулевых значений скорости вращения задающего 1 и исполнительного 4 органов. Величина задержки определяется характером типовых операций, выполнаемых манипулятором, и колеблется в пределах 0,1-1,0 С;. При дальнейшем вращении 92
И механизм торможения, выходы первого и.второго датчиков скорости подключены ко входам соответствующих нульорганов, выход-первого нуль-органа соединен со вторым входом элемента И, а выход элемента задержки подключен к первому входу ключа, через второй вход которого выход сумматора соединен со входом первого усилителя.
Источники информации, принятые во внимание при экспертизе
2„ Основы проектирования следящих систем. Под ред. Н.А.ЛокотЫо М., Машиностроение, 1978, с. 246, рис Vf.9 (прототип). 74 задающего органа 1 на выходе датчика 3 скорости появляется сигнал, возвращающий в исходное состояние, характеризуемое отсутствием сигнала на выходе, нуль-орган 11. Это приводит к изменению сигнала на выходе элемента И 13 и соответственно на входа; ключа 9 и усилителя 15,-Ключ 9 вновь замыкает цепь питания электродвигателя 5, а механизм 16 расфиксирует исполнительный орган 4. Устройство переходит из режима удержания в режим активного слежения. Применение изобретения позволяет снизить величину потребляемой энергии И увеличить ресурс работы электродвигателя. Формула изобретения Устройство для управления электромеханическим копирующим манипулятором, содержащее установленные на задающем органе первый датчик положения и первый датчик скорости и установленные на исполнительном органе электродвигатель, входом соединенный с выходом первого усилителя, второй датчик положения и второй датчик скорости, причем выходы первого и второго датчиков положения подключены ко входам сумматора, отличающееся тем, что, с целью улучшения эксплуатационных характеристик устройства за счет уменьшения.-потребляемой мощности и увеличения срока службы электродвигателя, устройство содержит ключ, первый нуль-орган и последовательно соейиненные второй нуль-орган, элемент И, элемент задержки, второй усилитель
