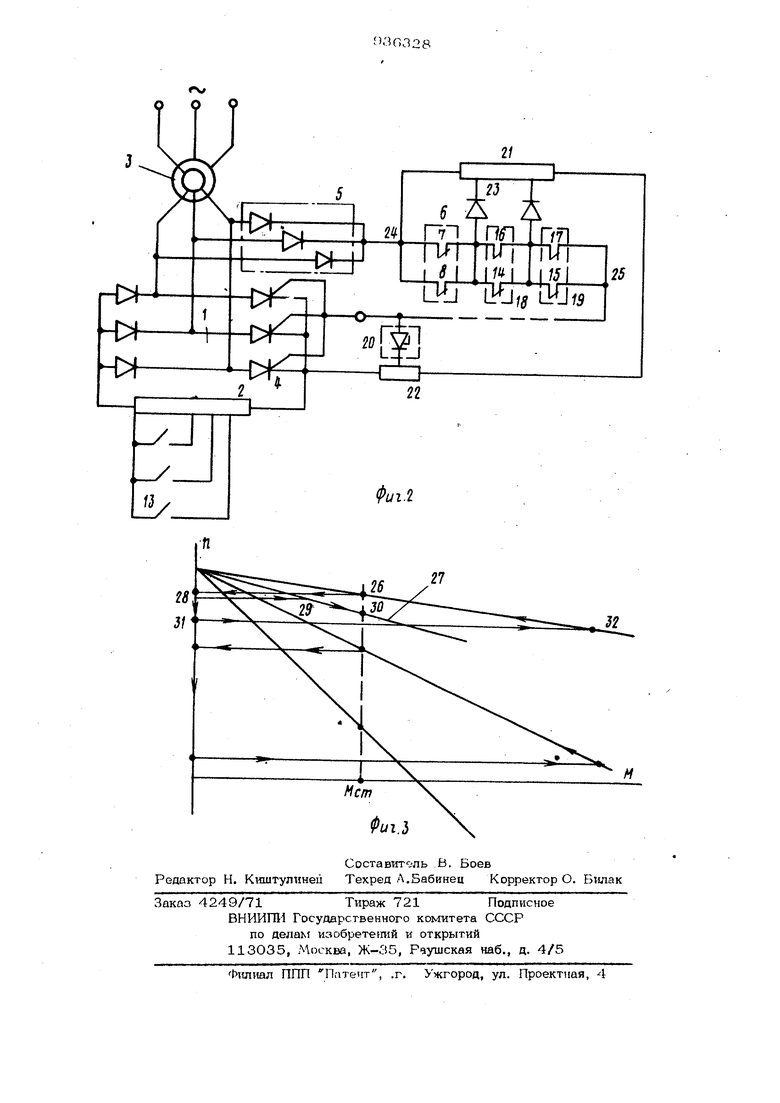
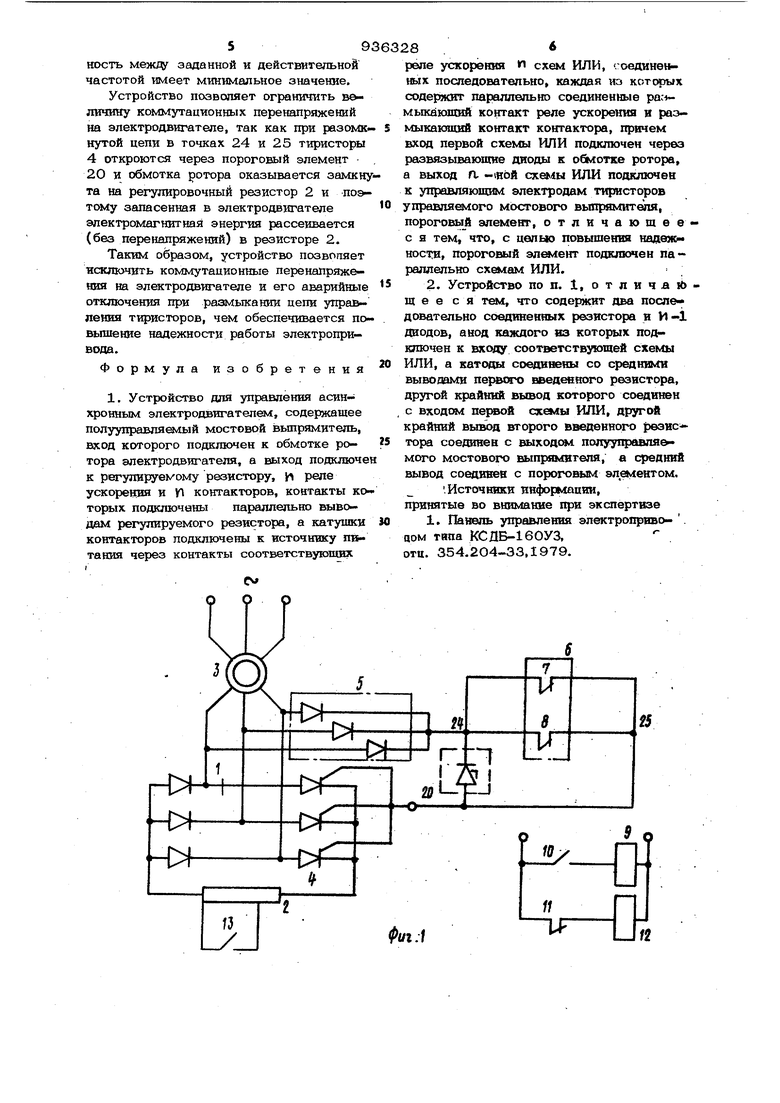
Изобретент-1е относится к электротехншсе и может быть использовано в апект- роприводах крановых механизмов. Наиболее близким к предлагаемому по технической сущности и достигаемому результату является устройство для управ ления асинхронным электродвигателем, содержащее полууправляемый мостовой выпрямитель, вход которого соединен с обмоткой ротора электродвигателя, а выход подключен к регулируемому резир- тору И реле ускорения и VI контакторов, контакты которых подключены параллельно выводам регулируемого резисто ра, а катушки контакторов подключены к источнику питания через контакты соот ветствующих реле ускоре1гая .п схем ИЛИ, соединенных последовательно, каждая из которых содержит параллельно соединенные размыкаюи1кй контакт контакторы и размыкающий контакт реле ускорения, причем вход - первой схемы ИЛИ подклк чен через развязывающие диоды к обмотке ротора, а выходом - к управляющшч электродак тиристоров полууправляемого 1 тостовс)го выпряму1теля и порог овый элемент, сч)язг-1ннь1й с уп1)авляющим1 электродами тирис-горов мостового выпрямите . Иодосп-атком устройства является низкая его надежность того, что при размыкании контактов контакторов и реле ускорения в цепи управляющих электродов TnpvicTopoB мостового выпрямителя, размыкается цепь о{5мотки ротора, элект родвигатоль не создает вращающий мент и Б электроприводе подъема крана произойдет падение груза. Во время раз- мыканчта обмотки ротора возникает перенапряжение, которое приводит к выходу ее из строя. Цель изобретения - повышенна надежности устройства. Указанная цель достигается тем, что в устройстве для управления асинхронным электродвигателем пороговый элеент подключен параллельно схемам ИЛИ. Устройство содержит два последовательно соединенных резистора и П -1 диодов, анод каждого из которых полклкутен к входу соответствующей схемы ИЛИ, а катоды соединены со средними ., выводами первого введенного резистора другой крайний вьшод которого соединен с входом первой схемы ИЛИ, другой крайний вывод второго введенного резистора соединен с выходом полууправляег ого мостового выпрямителя, а средний вывод соединен с пороговым элементом. На фиг. 1 и 2 показаны схемы усрройства на фиг. 3 - механические характеристики электродвигателя. Устройство для управления асинхронным двигателем с фазным ротором соде1 жит полууправпяемый мостовой вьшрямин тель 1 и регулировочный резистор 2, включенные последовательно в цепь об- моткиротора электродвигателя 3. Полууправляетлый мостовой выпрямитель 1 содержит тиристоры 4, расположенные в катодной (фиг. 1) или анодной (фиг. 2) группе вентилей, управляющие электроды которых соединены с обмоткой ротора через последовательно включенные группу развязывающих диодов 5 и схему ИЛИ 6, состоящую из параллельно включенных раз1 1ыкающих контактов 7 и 8, реле ускорения и контактора. Ка- туш1ш 9 реле ускорения подключена к источнику питания через командоаппарат 10, контакт 11 реле ускорения включен в цепь катушки 12 контактора ускорения контакты 13 которого подключены к регутгарйвочному резистору 2. Если устро ройство выполнено с несколькими контакторами ускорения, то оно содержит Ч;толь ко реле ускорения, включенные аналогично. Соответственно контакты 14 и 15 принадлежат контакторам, а контакть 16 и 17 - реле ускорения. Контакты 8, 14 и 15 принадлежат контакторам, соответ ствующим наибольшей средней и наямен шей частоте вращения электродвигателя 1 Контакты 16, 14, и 17, 15 образуют схемы ИЛИ 18 и 19. Параллельно схеме ИЛИ 6 (параллельно схемам ИЛИ 6, 18 и 19) включен пороговый элемент 20. Устройство может быть снабжено последовательно соединенными резисторами 21 и 22, подключенными ко входу схемы ИЛИ 6 и к выходу полууправляемого моо тового выпрямителя 1, а также дополнительными диодами 23, подключенными межру общими выводами схем ИЛИ 6, 18 и 18, 19 и средними выводами резистора 21. Пороговый элемент 20 может быть выполнен, например,- в виде . стабилитрона (фиг. 1-3), динистора и т. д. Точка 24 соответствует входу схемы ИЛИ 6, а точка 25 - выходу. Точки 26, 27, 28, 29, ЗО, 31 и 32 определяют работу электропривода на соответствующей механической характеристике. Устройство работает следующим образом. При переводе электродвигателя 3 с большей частоты вращения на меньшую частоту вращения замыкается контакт командоаппарата 10, получает питание катушка 9 реле ускорения и размыкаются контакты 11 и 7, при этом на время отключения катушки 12 контактора т ристоры 4 теряют управляющий сигнал разрыва цепи между точками 2425 и происходит размыкание контакторов 13 катушки 12 контактора при токе обмотки ротора, равном нулевому значению. Если двигатель 3 работает в приводе механизма подъема крана на характеристике в точку 26, то при переходе на характеристику 27 предварительно попа даеМ;Л точку 28 (кратковременный разрыв цепи ротора) и далее в точку 29 и 30 механической характеристики. При аналогичном переходе в случае неисправности контактора цепь включения тиристоров 4 остается разомкнутой и поэтому из точки 26 попадает в точки 28 и 31 механической характеристики. В точке 31 напряжение между точками 24 и 25 схемы достигает напряжения пробоя порогового элемента 2О и на управляющих электродах тиристоров 4 появится упраляющий сигнал. Поскольку контакт 13 не разомкнулся, то из точки 31 попадаем в точку 32 механической характеристики. В случае нескольких ступеней регупи - ровочного резистора 2 к соответственно нескольких контакторов ускорения и реле ускорения для ограничения пульсации мемента при- упомянутой неисправности, а также для минимального изменения чаототы вращения против заданной частоты предназначены резисторы 21 и 22 и диоды 23. Резистор 21 и 22 образуют дглитель напряжения, одно из плеч которого автоматически измеряется с помоидаю диодов 23. Так при разрыве в схеме ИЛИ 18 из-оа изменения сопротивления резисторы 21 пороговый элеменгг 20 пробьется примменьшем напряжении в роторе, поэтому при неиснравности разность меж/V заданной и действительной частотой имеет минимальное значение. Устройство позволяет ограничить в&личину коммутационных перенапряжений на электродвигателе, так как при разомкнутой цепи в точках 24 и 25 тиристоры 4 откроются через пороговый элемент 20 и обмотка ротора оказывается замкну та на регулировочный резистор 2 и поэтому запасенная в электродвигателе электромагнитная энергия рассеивается (без перенапряжений) в резисторе 2. Таким оёразом, устройство позволяет исключить коммутационные перенапряжения на электродвигателе и его аварийные отключения при размыкании цепи управления тиристоров, чем обеспечивается по вьпиение надежности работы электропривода. Формула изобретения 1. Устройство для управления асинхронным электродвигателем, содержащее полууправляемый мостовой выпрямитель, вход которого подключен к обмотке ротора электродвигателя, а выход подк/иоче к регулируемому резистору, И реле ускореиия и Ю контакторов, контакты Kt торых подключены параллельно выводам регулируемого резистора, а катушки контакторов подключены к источнику питания через контакты соответствуюпшх реле ускорения м схем ИЛИ, соединенных последовательно, каждая из которых содержит параллельно соединенные ра; мыкакшшй контакт реле ускорения в размыкающий контакт контактора, причем вход первой схемы ИЛИ подключен через развязывающие диоды к обмотке ротора, а выход П -1НЬй сл&ил ИЛИ подключав к управляющим электродам тиристоров управляемого мостового выпрямителя, пороговь1й элемент, отличающее с я тем, что, с целью повышения надвя ности, пороговый элалент подключен параллельно схемам ИЛИ. 2. Устройство по п. 1, о т л и ч а и) щ е е с я тем, что содержит два последовательно соединенных резистора и И -1 диодов, анод каждого из которых подключен к входу соответствующей схемы ИЛИ, а катоды соеди1юны со средними выводами первого введевного резистора, другой крайний вывод которого соединен с входом первой схемы ИЛИ, другой крайний выЕЙэд второго введенного резне TojKi соединен с выходе полууправляемого мостового выпрямителя, а средний вывод соедивев с пороговым элемевтом. .Источники иифор лации, принятые во внимание при экспертизе 1. Шнель управлеиия электроприво- . цом типа КСДБ-160УЗ, отц. 354.204-33,1979.
21
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления механизмом горизонтального перемещения подъемного транспортного средства | 1985 |
|
SU1344712A1 |
| ЭЛЕКТРОПРИВОД | 2005 |
|
RU2277747C1 |
| Устройство для управления приводом механизма горизонтального перемещения подъемно-транспортного средства | 1989 |
|
SU1805093A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1980 |
|
SU890540A1 |
| Устройство для включения контактора со стабилизацией рабочего тока катушки | 1980 |
|
SU951457A1 |
| Устройство для управления электромагнитом | 1981 |
|
SU983768A1 |
| Электропривод | 1990 |
|
SU1746505A1 |
| Электропривод переменного тока | 1986 |
|
SU1317628A1 |
| Электропривод переменного тока | 1985 |
|
SU1319215A1 |
| Система питания для электровакуумныхпОТРЕбиТЕлЕй пОСТОяННОгО TOKA СТЕХНОлОгичЕСКиМи КОРОТКиМи зАМыКАНияМи | 1978 |
|
SU845220A1 |