w
Ё


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления механизмом горизонтального перемещения подъемного транспортного средства | 1985 |
|
SU1344712A1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| ЭЛЕКТРОПРИВОД | 2015 |
|
RU2586630C1 |
| ЭЛЕКТРОПРИВОД | 2012 |
|
RU2531380C2 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298520C2 |
| Электропривод | 1983 |
|
SU1220101A1 |
| КРАНОВЫЙ ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА ГРУЗА | 2007 |
|
RU2345945C1 |
| Устройство для управления грузоподъемным механизмом | 1985 |
|
SU1384538A1 |
| Устройство для управления асинхронным электродвигателем с фазным ротором | 1985 |
|
SU1259379A1 |
| Устройство для управления асинхронным двигателем с фазным ротором | 1990 |
|
SU1815779A1 |

Использование: в области подъемно- транспортного машиностроения, а именно в устройствах управления электроприводами механизмов горизонтального перемещения подъемно-транспортных средств. Устройство содержит асинхронный двигатель, в цепь ротора которого включены: пу- скорегулирующие резисторы и тиристорный коммутатор. Управление двигателем осуществляется командоконтроллером, тормозной педалью с контактами. 2 ил.
Изобретение относится к подъемно- транспортному машиностроению, напри- мёр к механизмам поворота или передвижения башенных кранов,
Целью настоящего изобретения является расширение функциональных возможностей устройства путем получения тормозного режима и упрощение конструкций при управлении двумя или более механизмами, механически связанными между собой.
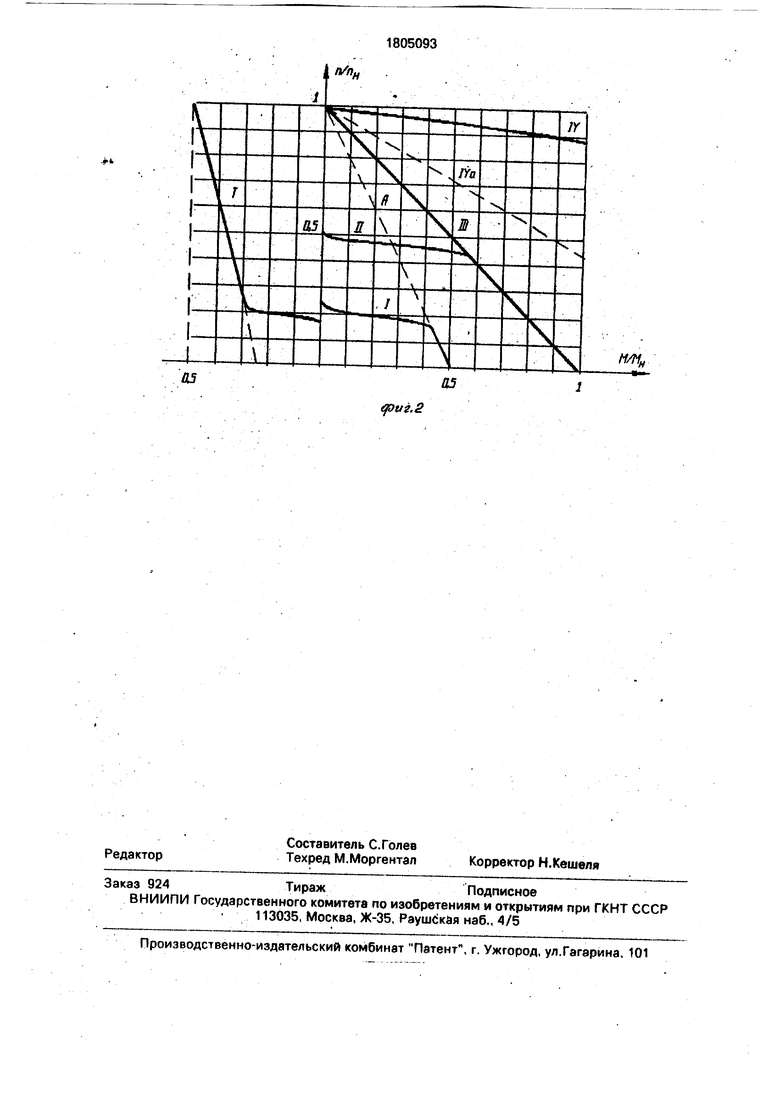
На фиг. 1 представлена принципиальная схема устройства; на фиг. 2 - механические характеристики привода.
Устройство управления механизмом го- ризонтального перемещения содержит асинхронный электродвигатель 1, в Цепь статора которого включены контакты 2 и 3 контакторов реверса, катушки 4 и 5 которого
связаны с контактами 6 и 7 командоконтроя- лера8.
Тиристорный коммутатор 9, выполненный по трехфазной полууправляемой мостовой схеме, вход которого через резисторы 10, 11 и 12 подключен к соответствующим фазам роторной обмотки электродвигателя 1, распределитель импульсов 13, выполненный в виде резистора 14 и трех диодов 15, 16 и 17, выводы которых подключены к управляющим электродам соответствующих тиристоров коммутатора 9, трехфазный мостовой выпрямитель 18, вход которого связан с фазами роторной обмотки через конденсаторы 19, а выход которого шунтирован резисторами 20,21,22 и 23, соединенными последовательно; оптотиристор 24, излучающий диод 25 которого через пороговый элемент, выполненный на стабилитро00
о ел о
Ч Сл
а х 26 и 27, подключен к выходу трехфазноо мостового выпрямителя 18, а фототири- тор 28 оптотиристора 24 подключен к езистору 14 распределителя импульсов 13. Пускорегулирующие резисторы 10, 11 и 12 цепи ротора электродвигателя 1 шунтиуются контактами 29, 30 и 31 контакторов скорения, катушки 32, 33 и 34 которых свяаны соответственно с контактами 35 и 36 омандоконтроллера 8, причем в цепь каушки 34 контактора ускорения IY-й ступени включен замыкающий контакт 37 контактора 33 III-й ступени. Размыкающий контакт 38 контактора ускорения 1 -и ступени шунтирует часть резистора 22 и 23 на входе порогового элемента 26. Катушка 39 контактора скорения II-й ступени связана с контактом 40 командоконтроллера 8, а его контакт 41 шунтирует фототиристор 28 оптотиристора 24.
Электромагнит 42 стояночного тормоза подключен к сети контактами 43 контактора тормоза, катушка 44 которого связана с контактами 45 командоконтроллера 8. Замыкающий контакт 46 контактора тормоза связан с катушкой 47 дополнительного контактора, замыкающий контакт 48 связывает вход тиристорного коммутатора 9 с пускоре- гулирующим резистором 12, замыкающий контакт 49 дополнительного контактора шунтирует резистор 21 для создания требуемой тормозной характеристики, а размыкающий контакт 50 связывает с ротором датчик скорости 51, размыкающий контакт 52 которого связывает с сетью катушку 44 контактора тормоза через замыкающий контакт 53 контактора тормоза.
Катушки 54 и 55 реле памяти направления движения, связанные с контактами 56 к 57 командоконтроллера 8 через замыкающие контакты 58 и 59 контакторов реверса, зашунтированы замыкающими контактами 60 и 61 соответствующих реле памяти направления движения. Замыкающие контак- ты 62 и 63 реле памяти направления движения связывают катушки 4 и 5 контакторов реверса с контактом 64 командоконтроллера 8, причем контакт 62 катушки 54 реле памяти движения в прямом направлении связан с катушкой 5 контактора реверса противоположного направления, а контакт 63 катушки 55 реле памяти противоположного направления связан с катушкой 4 контактора реверса прямого направления.
Размыкающий контакт 65 педали торможения связывает с сетью контакты 6, 7, 35, 36 и 40 командоконтроллера 8, и замыкающий контакт 66 связывает с сетью кон- такт 64 командоконтроллера 8 через
замыкающий контакт 53 контактора тормоза.
Контактный узел 67 предназначен для взаимной блокировки катушек 4 и 5 и контактора реверса.
Резистор 68 предназначен для ограничения тока через излучающий диод 25 оптотиристора 24.
В качестве датчика скорости 51 применено реле, которое контролирует напряжение в фазе ротора, пропорциональное скольжению. Реле можно настраивать на требуемую частоту вращения.
При установке нескольких механизмов
5 на кране статоры 69 и 70 второго и третьего электродвигателей подключены параллельно к контактам 2 и 3 контакторов реверса, Трехфазные тиристорные коммутаторы 71 и 72 связаны анодом фототиристора 28, к ка0 году которого подключены параллельно включенные распределители импульсов 73 и 74, выходы которых подключены к управляющим электродам тиристоров коммутаторов 71 и 72. Вход тиристорного коммутатора
5 71 через резисторы 75, 76 и 77 подключен к соответствующим фазам роторной обмотки электродвигателя 69, а вход тиристорного коммутатора 72 через резисторы 78, 79 и 80 подключен к соответствующим фазам ро0 торной обмотки электродвигателя 70, при- чем замыкающие контакты 81 и 82. дополнительного контактора связывают вход соответствующего тиристорного коммутатора 71 и 72 с резисторами 77 и 80,
5 Пускорегулирующие резисторы 75, 76 и 77 цепи ротора электродвигателя 69 шунтируются контактами 83, 84 и 85, а Пускорегулирующие резисторы 78, 79 и 80 цепи ротора электродвигателя 70 шунтируются контак0 тами 86, 87 и 88 контакторов ускорения, причем катушки 89 и 90 контакторов ускорения 1-й ступени подключены параллельно катушке 32 контактора ускорения 1-й ступени электродвигателя 1, катушки 91 и 92 кон5 такторов ускорения lll-й ступени подключены параллельно катушке 33 контактора ускорения III-й ступени электродвигателя 1, а катушки 93 и 94 контакторов ускорения IY-й ступени подключены парал0 лельно катушке 34 контактора ускорения IY- й ступени электродвигателя 1.
Устройство работает следующим образом.
При переводе командоконтроллера 8 в
5 первое положение (например, вправо) через замкнувшийся контакт 6 подключается катушка 4 контактора реверса, подключая контактами 2 статор электродвигателя 1 к сети. Одновременно через замкнувшиеся контакты 45 командоконтроллера 8 включится катушка 44 контактора тормоза, подключая контактами 43 электромагнит 42 тормоза к сети. Электромагнит 42 включается, растор- ма кивания стояночный тормоз.
Напряжение ротора электродвигателя через конденсаторы 19 и выпрямитель 18 прикладывается к делителю, состоящему из резисторов 20, 21, 22 и 23. Пороговый эле- , состоящий из стабилитронов 26 и 27, подключенный к резисторам 22 и 23, открыт и пр излучающему диоду 25 оптотиристора 24 течет ток, ограничиваемый резистором 68. |Этот ток обеспечивает открытие силового Перехода оптотиристора 24, обеспечивая пофчу сигнала управления через фототири- стсф 28, распределитель импульсов 13 на управляющие электроды тиристорного коммутатора 9, который переходит в открытое состояние. Цепь ротора двигателя замыкаете. Происходит разгон электродвигателя 1 по реостатной характеристике А, опреде- ляег|юй величиной сопротивления резисторов 10, 11 и 12. Резистор 12 также подключен к входу тиристорного коммута- . тора| 9 замкнувшимся контактом 48 допол- нит|ельного контактора, катушка 47 которого включена контактом 46 контактора тормоза. Одновременно контакт 49 допол- ните|льного контактора шунтирует резистор 21 в цепи делителя напряжения на выходе выпрямителя 18, обеспечивая необходимый сигн|ал управления.
flo мере разгона напряжение на роторе электродвигателя 1 уменьшается и при оп- редфенном значении частоты вращения электродвигателя стабилитроны 26 и 27 за- крыцаются и при этом закрывается тири- стоДный коммутатор 9. Цепь ротора элек родвигателя размыкается и частота врашения электродвигателя под действием момента сопротивления уменьшается. По мере замедления напряжение на роторе растет и при определенном значении частоты вращения стабилитроны 26 и 27 вновь откроются, откроется тиристорный коммутатор; 9 и снова начнется разгон электродви- гате/|я 1, Далее процесс повторяется, обеспечивая работу-привода в импульсно- ключевом режиме на характеристике 1. При переводе командоконтроллера 8 во второе положение через замкнувшийся контакт 35 подключается катушка 32 контактора ускорения 1-й ступени, контакты 29 которого шунтируют части сопротивления резисторов 10, 11 и 12 в цепи ротора электродвигателя |, а разомкнувшийся контакт 38 введет часть сопротивления в цепь делителя на выходе выпрямителя 18, что обеспечивает работу привода на характеристике II в импульсно-ключевом режиме.
При переводе командоконтроллера 8 в третье положение через замкнувшиеся контакты 40 включается катушка 39 контактора ускорения II ступени, контакт 41 которого 5 шунтирует фотодиод 28 оптотиристорв 24 и тиристорный коммутатор 9 открывается. Привод работает на реостатной характеристика III,
При переводе командоконтроллера 8 в
0 четвертое положение через замкнувшийся контакт 36 подключается катушка 33 контактора ускорения II 1-й ступени, контакты 30 которого выводят часть сопротивления в роторе электродвигателя 1 и электропривод
5 работает на промежуточной характеристике lV-a.
После включения катушки 33 контактора ускорения III-й ступени его контакт 37 замыкает и включает катушку 34 контактора
0 ускорения IY-й ступени, контакты 31 которого выводят следующую ступень сопротивления в цепи ротора электродвигателя 1 и электропривод работает на характеристике IY.
5 Аналогичным образом происходит разгон электродвигателя. 1 при переводе командоконтроллера 8 влево, только вместо катушки 4 подключается катушка 5 контактора реверса и замыкаются контакты 3 в
0 цепи статора электродвигателя 1.
При переводе командоконтроллера 8 в нулевое положение статор электродвигателя 1 отключается от сети, но стояночный тормоз не накладывается, т.к. катушка 44
5 контактора тормоза остается включенной
через замкнутые контакты 53 контактора
тормоза и контакты 52 датчика скорости 51.
Привод работает на свободном выбеге.
Если механизм работает против ветра или
0. уклона, т.е. сопротивление достаточное, чтобы механизм тормозился от внешних нагрузок, то частота вращения электродвигателя уменьшается и механизм останавливается. Если необходимо наложе5 ние стояночного тормоза, то нажимается педаль торможения, контакт 65 которой разомкнется, а контакт 66 замкнется и включится катушка 4 или 5 контактора реверса и контактами 2 или 3 подключит к сети статор
0 электродвигателя 1. Так как напряжение роторной цепи велико, то включится датчик . скорости 51 и разомкнет свой контакт 52 в цепи катушки 44 контактора тормоза. Контактор тормоза отключается, и накладыва5 ется стояночный тормоз. Одновременно размыкается контакт 53 и отключаются катушки 54 или 55 реле памяти направления движения и катушки 4 или 5 контактора ре- верса. Электропривод готов к новому включению. Если на свободном выбеге механизм
работает по ветру или уклону, т.е. сопротивление недостаточное, чтобы механизм тормозился от внешних нагрузок, то следует нажать педаль торможения. Контакт 65 педали разомкнется, а контакт 66 замкнется и включит катушку контактора реверса противоположного направления движения. Контакты 2 или 3 подключат статор электродвигателя 1. к сети, и происходит торможение привода в режиме противо- включения по характеристике Т.
После того, как привод затормозился по характеристике Т до частоты вращения, соответствующей настройке датчика скорости 51, его контакт 52 разомкнется и отключит питание катушки 44 контактора тормоза, контакты 43 которого отключат электромагнит 42 стояночного тормоза, механизм затормозится, а контакты 53 отключат цепь питания катушек 4 и 5 контактора реверса и катушек .54 и 55 реле памяти направления движения. Электропривод готов к новому включению.
При установке нескольких механизмов на кране устройство работает аналогично, только в этом случае одновременно включаются электродвигатели 1, 69 и 70.
Использование предлагаемого решения позволяет расширить функциональные возможности устройства за счет получения тормозного режима с определенным тормозным моментом и обеспечения устойчивой работы на тормозной характеристике при отрицательных моментах. Запрет нало- жения стояночного тормоза на больших скоростях значительно снижает динамические нагрузки на механизм, повышая его долговечность. При управлении несколькими ме- ханизмами предлагаемое решение позволяет аналогично упростить конструкцию, т.к. имеется только один общий блок управления на все механизмы,
Формула изобретения Устройство для управления.приводом механизма горизонтального перемещения подъемно-транспортного средства, содержащее реверсивные контакторы, контакты которых включены в цепь питания обмотки статора асинхронного электродвигателя, в цель питания обмотки ротора которого включены пускорегулирующие резисторы и тиристорный коммутатор, управляющий вход которого через пороговый элемент и распределитель импульсов связан с цепью обмотки ротора, командоконтроллер, кок- такты которого включены в цепи катушек реверсивных контакторов, контактора тормоза, и контакторов ускорения, и датчик скорости, о т л и ч а ю щ е е с я тем, что, с целью повышения надежности, оно снабжено реле памяти направления движения, катушки которых включены последовательно с соответствующими контактами командоконтроллера и реверсивных контакторов, дополнительным контактором, в цепь обмотки которого включен замыкающий контакт контактора тормоза, и тормозной педалью, размыкающий контакт которой включен в цепь питания упомянутых обмоток контакторов, а замыкающий - в цепь питания катушек реверсивных контакторов через соответствующие замыкающие контакты реле памяти, причем один- замыкающий контакт контактора тормоза включен в цепь питания катушек реле памяти, катушек реверсивных контакторов через упомянутый замыкающий контакт тормозной педали ив цепь литания катушки контактора тормоза через размыкающий контакт датчика скорости, включенного в одну фазу тиристорного регулятора, в цепь другой фазы которого включен один замыкающий контакт дополнительного контактора, второй замыкающий контакт которого включен в цепь управления порогового элемента.
| Авторское свидетельство СССР , № 1344712, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
