стоимостных показателей установленного оборудования.
Известный способ реализуется устройством, содержащим общий источник питания, один вывод которого подключен к первым выводам якорных обмоток электродвигателей секций и индивидуальных преобразователей, охваченных обратной связью по скорости , первые силовые входы которых объединены и подключены ко второму выводу общего источника питания Ctj,
Это устройство требует более, чем удвоенного количества машин постоянного тока, что приводит к уменьшению надежности агрегата, увеличению ремонтно-профилактических работ увеличению веса, габаритов и стоимости электрооборудования.
Цель изобретения - повышение надежности путем сокращения установленного оборудования.
Указанная цель достигается тем, что согласно способу общее силовое напряжение устанавливают соответствующим экстремальной из всех секций скорости электродвигателя в данном режиме, а для обеспечени подрегулирования скорости каждой секции формируют частоту импульсов управления электродвигателем каждой секции, соответствующей заданному Изменению скорости данной секции по сравнению с экстремальным значением, а при отклонении скорости каждого двигателя от заданного изменения регулируют частоту импульсов управления двигателями для поддержания заданного изменения скорости каждого двигателя, а общий источник питания вуполнен в виде двух последовательно соединенных управляемого и неуправляемого выпрямителей, каждый индивидуальный преобразователь выполнен в виде последовательно соединенных тиристора, дросселя, конденсатора и снабжен обратным диодом, включенным параллельно конденсатору, причем аноды тиристоров образуют первые силовые входы индивидуальных преобразователей, вторые силовые входы которых объединены и подключены к точке соединения указанных выпрямителей, а выход каждого индивидуального преобразователя подключен ко второму выводу якорных обмоток электродвигателей соответствующей секции.
Устройство дополнительно снабжено последовательно соединенными дросселем и конденсатором, подключенным к выходу управляемого выпрямителя, и тиристором, анод которого подключен к выходу индивидуального преобразователя,-а катод к положительному выводу управляемого выпрямителя.
Устройство снабжено также резистором динамического торможения и дополнительным вентиль но-конденсаторным
преобразователем, состоящим из последовательно соединенных тиристора, дросселя и конденсатора, шунтированного обратным диодом, причем силовые входы преобразователя подключены параллельно якорным обмоткам двигателей, а выходы - к резистору динамического торможения.
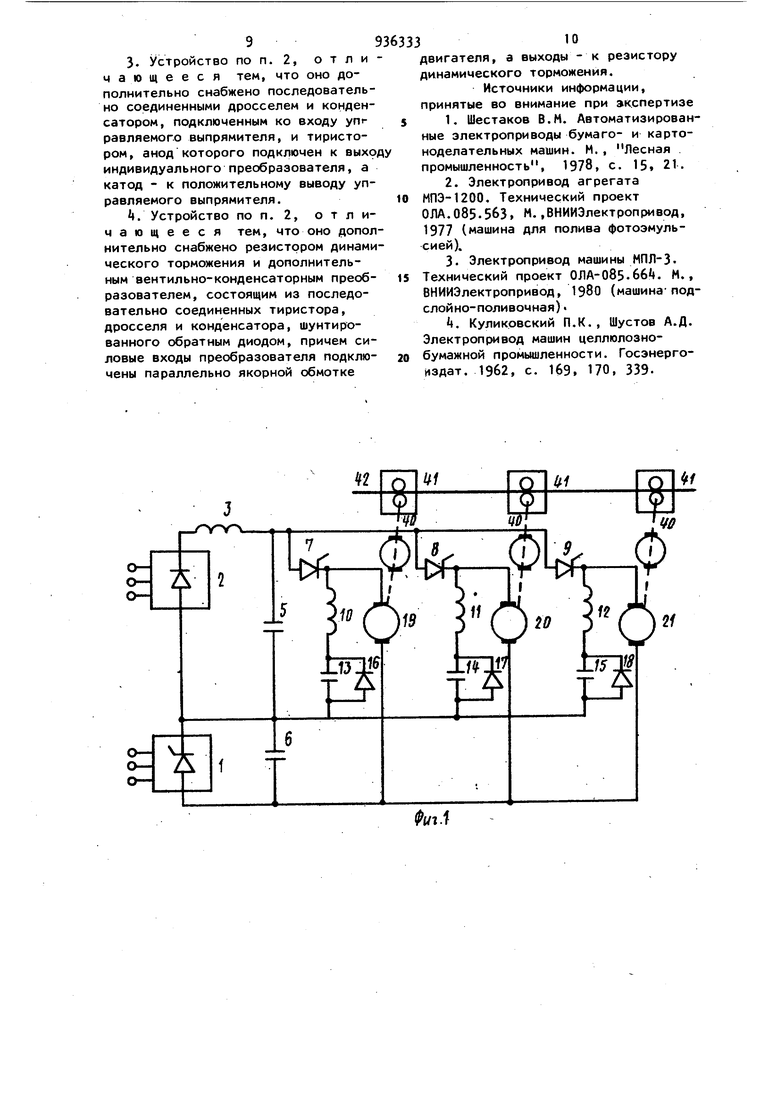
На фиг. 1 показана функциональная схема устройства для осуществления способа; на фиг. 2 а, б - схемы осуществления рекуперативного и динамического торможения.
У- тройство содержит управляемый выпрямитель 1, соединенный последовательно с неуправляемым выпрямит;елем 2. К выходам выпрямителей подключены фильтры, состоящие из дросселей 3 и i и конденсаторов 5 и 6, К выходу фильтра неуправляемого выпрямителя 2 подключены п вентильно-конденсаторных преобразователей, состоящих из тиристоров 7, 8, 9 и LC-контуров, содержащих дроссели 10, 11 и 12 и конденсаторы 13, I и 15 зашунтированные диодами 16, 17 и 18 таким образом, что катоды диодов связаны через дроссели LC-контуров с катодами тиристоров. Якори двигателей 19, 20 и 21 подключеныпервыми выводами к ка1одам соответствующих тиристоров и вторыми выводами - к отрицательному полюсу управляемого выпрях мителя.
Для.возможности рекуперации энергии двигателя одной секции на общие шины (фиг. 2а) якорь двигателя 19 этой секции связан с анодом до- полнительного тиристора 22, катод которого подключен к положительному выводу управляемого выпрямителя 1,
параллельно .которому включен дополнительный LC-контур, состоящий из катушки индуктивности 23 и конденсатора 2i. Агрегаты с динамическим торможен ем каждой секции (фиг. 26) устроены следующим образом. Каждый двигатель 19, 20 и 21 под ключен с одной стороны к вентильноконденсаторным преобразователям, оп санным выше, и с другой стороны к дополнительным устройствам динами ческого торможения, состоящим из ре зисторов динамического торможения 25, 26 и 27 тиристоров 28, 29 и 30 LC-контуров, состоящих из дросселей 31, 32 и 33 и конденсаторов 35 и 36, зашунтированных диодами 37, 38 и 39- Датчики скорости ЦО со динены с валками k, связанные лентой k2. Способ управления многосекционным агрегатом осуществляют следующи образом (фиг, 1). Путем импульсно-фазового управления устанавливают напряжение управляемого выпрямителя 1 таким обра зом, чтобы скорость двигателей приблизительно равнялас.ь заданной минимальной из всех секций скорости. Индивидуальную подрегулировку скорости двигателя каждой секции производят отпиранием соответствующих тиристоров. Так, например, подают отпирающий импульс на тиристор 7, заряжают конденсатор 13i после чего тиристор 7 запирается. После запирания тиристора 7 на двигатель 19 подают напряжение, равное сумме напряжений управляемого выпрямителя и конденсатора. Таким образом, в зависимости от частоты отпирания тиристора 7 напряжение на двигателе (и,, соответственно, его скорость) изменяют от напряжения, равного напряжению управляемого выпрямителя, до напряжения, равного сумме напряжений управляемого и неуправляемого выпрямителей. При этом устанавливают частоту импульсов соответствующей заданному увеличению скорости данной секции по сравнению с минимальным значением и при помощи обратной связи по скорости изменяют частоту импульсов управления для поддержания заданного увели чения скорости каждого двигателя. В приводах небольшой мощности вентильно-конденсаторные преобразователи можно питать непосредственно от управляемого выпрямителя. При этом источник питания выполнен в- виде управляемого выпрямителя. а вентильно-конденсаторные преобразователи соединены параллельно и подключены к выводам выпрямителя. Устанавливают напряжение управляемого выпрямителя 1, соответствующее скорости, несколько превышающей заданную. Затем подают отпирающие импульсы на тиристоры 7, 8 и 9, заряжают конденсаторы 13, 1 и 15 до напряжения, приблизительно равного удвоенному выходному напряжению управляемого выпрямителя 1. После запирания тиристоров 7, 8 и Э на двигатель подают напряжение от конденсаторов. При этом напряжение на двигателе изменяют в пределах от нуля до напряжения полностью открытого управляемого выпрямителя. Электропривод многодвигательного электропривода многосекционного агрегата работает следующим образом. На управляемом выпрямителе 1 устанавливается напряжение, соответствующее скорости двигателей, несколько меньше заданной. Если при этом тиристоры 7 8 и 9 закрыты, то на двигатели 19, 20 и 21 поступает напряжение от управляемого выпрямителя 1 через диоды 16, 17 и 18. При отпирании тиристоров (например, тиристора 7) запирается диод 16 и на двигатель поступает суммарное напряжение управляемого выпрямителя 1 и неуправляемого выпрямитеяя 2. Одновременно через тиристор 7 и катушку индуктивности 10 заряжается конденсатор 13, запирающий тиристор 7- После разрядки конденсатора отпирается диод 16, и двигатель снова питается от управляемого выпрямителя. Таким образом, при изменении частоты отпирания тиристора 7 напряжение на каждом двигателе дополнительно регулируется в пределах, определяемых напряжением неуправляемого выпрямителя. Многодвигательный электропривод малой мощности с питанием от одного управляемого выпрямителя и параллельно соединенными вентильноконденсаторными преобразователями работает следующим образом. С заданной частотой отпираются, тиристоры 7, 8 и 9- Конденсаторы 13, l и 15 заряжаются от управляемого выпрямителя 1 по контурам: тиристор 7, индуктивность 10 и конденсатор 13; тиристор 8, индуктивность
11 и конденсатор тиристор 9. индуктивность 12 и конденсатор 15. По ле зарядки конденсаторов закрываются тиристоры 7. 8 и 9 и конденсаторы 13 1 и 15 разряжаются на двигатели 19, 20 и 21, В зависимости от частоты открывания каждого из тиристоров 7, 8 и 9 индивидуально регулируются скорости каждого двигателя .
Электропривод с рекуперацией энергии на общие шины управляемого выпрямителя работает следующим образом.
При возникновении активного момента на двигателе 19 (фиг. 2а) включается тиристор 22 (с тиристора 7 сигнал управления снимается). Конденсатор 2, заряженный прежде до напряжения управляемого выпрямителя Ug, дозаряжается через тиристор 22 до напряжения , равного .Ut. (в. -U ). Тиристоры управляемого выпрямителя 1 запираются и секции получают питание от конденсатора 2k. После разряда конденсатора 2k вновь включается выпрямитель 1. Частота включения тиристора 2k пропорциональна рекуперируемой мощности.
Электропривод с динамическим торможением (фиг. 26) работает с1Ьедующим образом.
В двигательном режиме включаются тиристоры 7. 8 и 9 и заряжаются конденсаторы 13, 1 и 15- В режиме динамического торможения включаются тиристоры 28, 29 и 30 и заряжаются конденсаторы 3, 35 и 36 до напряжения, приблизительно равного удвоенному напряжению машин 19, 20 и 21 соответственно. После закрывания тиристоров 28, 29 и 30 конденсаторы разряжаются на резисторы 25, 26 и« 27, передавая им энергию, пропорциональную частоте отпирания тиристоров.
Таким образом, данный электропривод обеспечивает высокую точность регулирования в большом диапазоне при существенном сокращении электрооборудования либо дорогих и требующих обслуживания машин постоянного тока, либо многоэлементных индивидуальных тиристорных преобразователей, что повышает его надежность.
Формула изобретения 1. Способ регулирования многодвигательного электропривода много363338
, секционного агрегата, при котором устанавливают общее силовое напряжение, задающее скорость, и подрегулируют скорость электродвигателя 5 каждой секции многосекционного агрегата, отличающийся тем, что, с целью повышения надежности путем сокращения установленного электрооборудования, общее силовое напряжение устанавливают соответствующим экстремальной из всех секций скорости электродвигателя в данном режиме, а для обеспечения подрегулирования скорости каждой секции формируют частоту импульсов управления электродвигателем каждой секции, соответствующей заданному изменению скорости данной секции по сравнению с экстремальным значением, а при
20 отклонении скорости каждого двигателя от заданного изменения регулируют частоту импульсов управления двигателями для поддержания заданного изменения, скорости каждого двигателя.
25 I
2. Устройство для осуществления
способа регулирования многодвигательного .электропривода многосекционного агрегата, содержащее общий ,« источник питания, один выход которого подключен к первым выводам якорных обмоток электродвигателей секций, и индивидуальные преобразователи, охваченные обратной связью по скорости, первые силовые входы которых объединены и подключены ко второму выводу общего источника питания, отличающееся тем, что, с целью повышения надежности путем сокращения установленного оборудования общий источник питания выполнен в виде двух последовательно соединенных управляемого и неуправляемого выпрямителей, каждый индивидуальный преобразователь выполнен в виде последовательно соединенных тиристора дросселя, конденса- тора и снабжен обратным диодом, включенным параллельно конденсатору, причем аноды тиристоров образуют первые силовые входы индивидуальных преобразователей, вторые силовые входы которых объединены и подключены к точке соединения указанных выпрямителей, а выход каждого индивидуального преобразователя подключен ко второму выводу якорных обмоток электродвигателя соответствующей секции.
3. Устройство по п. 2, отличающееся тем, что оно дополнительно снабжено последовательно соединенными дросселем и конденсатором, подключенным ко входу упг равляемого выпрямителя, и тиристором, анод которого подключен к выход индивидуального преобразователя, а катод - к положительному выводу управляемого выпрямителя.
. Устройство по п. 2, отличающееся тем, что оно дополнительно снабжено резистором динамического торможения и дополнительным вентильно-конденсаторным преобразователем, состоящим из последовательно соединенных тиристора, дросселя и конденсатора, шунтированного обратным диодом, причем силовые входы преобразователя подключены параллельно якорной обмотке
двигателя, а выходы - к резистору динамического торможения.
Источники информации, принятые во внимание при экспертизе
1.Шестаков В.М. Автоматизированные электроприводы бумаге- и картоноделательных машин. М., Лесная промышленность, 1978, с. 15, 21.
2.Электропривод агрегата МПЭ-1200, Технический проект
ОЛА.085.563, М.,ВНИИЭлектропривод, 1977 (машина для полива фотоэмульсией).
3.Электропривод машины МЛЛ-3 Технический проект ОЛА-085.66. М., ВНИИЗлектропривод, 1980 (машинаподслойно-поливочная)«
. Куликовский П.К. , Шустов А.Д. Электропривод машин целлюлознобумажной промышленности. Госэнергоиздат. 1962, с. 169. 170, 339.


| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2332315C1 |
| Многодвигательный электропривод | 1980 |
|
SU930557A2 |
| Многодвигательный электропривод намоточного устройства | 1984 |
|
SU1251283A1 |
| Многодвигательный электропривод | 1983 |
|
SU1115195A1 |
| Многодвигательный электропривод | 1980 |
|
SU955490A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД | 2007 |
|
RU2333849C1 |
| Многодвигательный электропривод постоянного тока | 1971 |
|
SU748766A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД | 1992 |
|
RU2048311C1 |
| Многодвигательный электропривод | 1979 |
|
SU851719A1 |
| Многодвигательный тяговый электропривод | 1990 |
|
SU1824663A1 |

