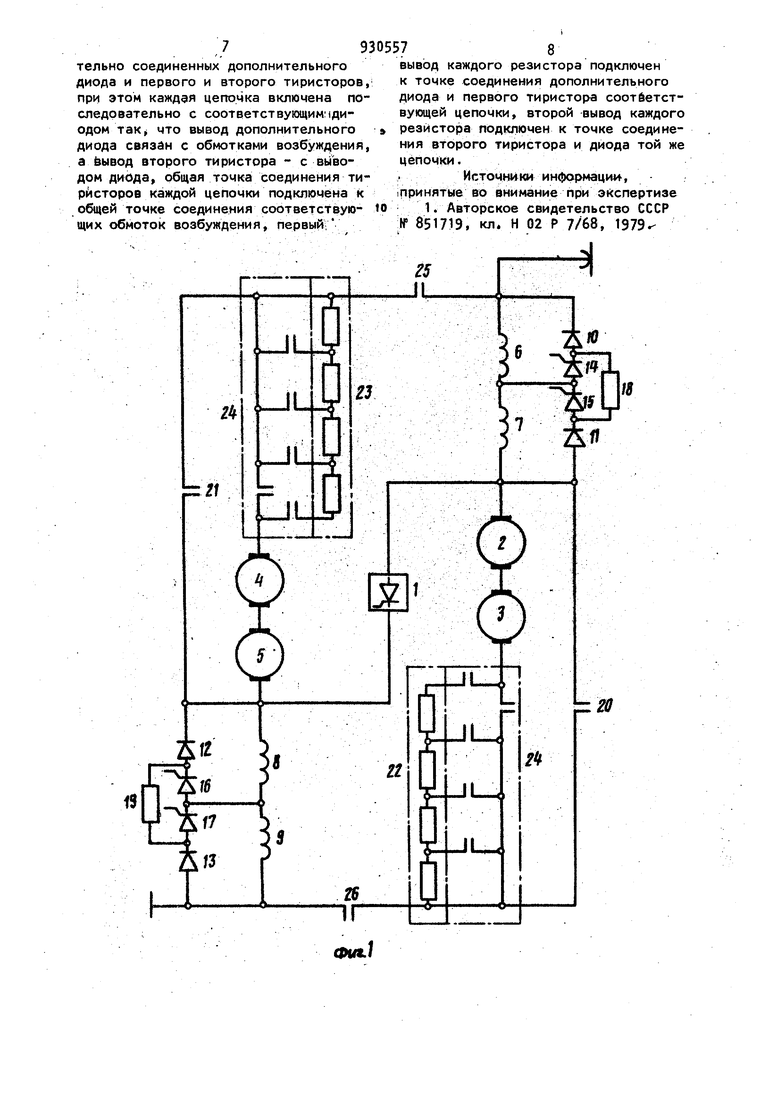
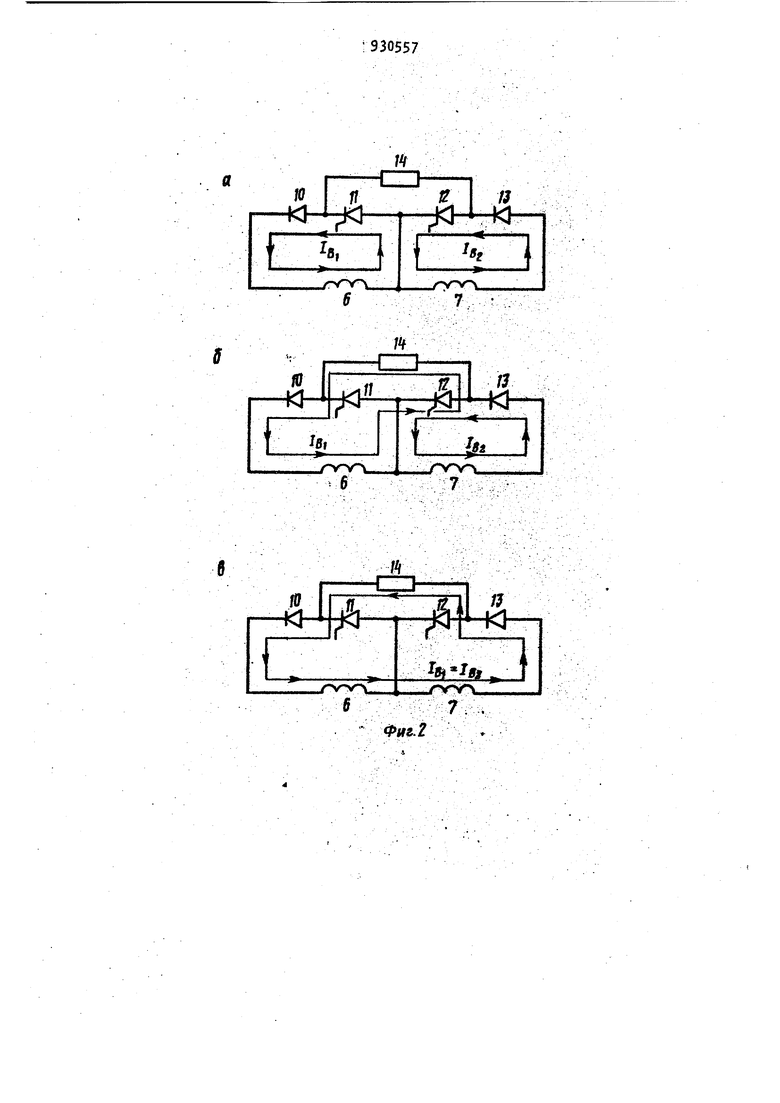
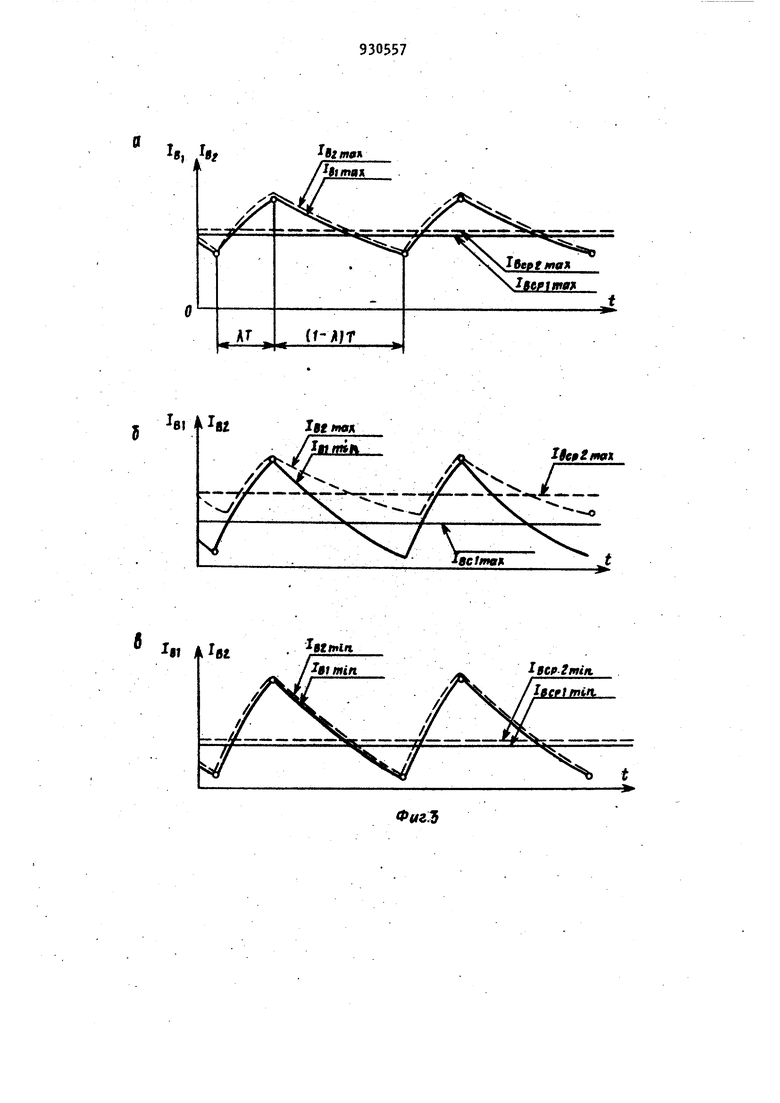
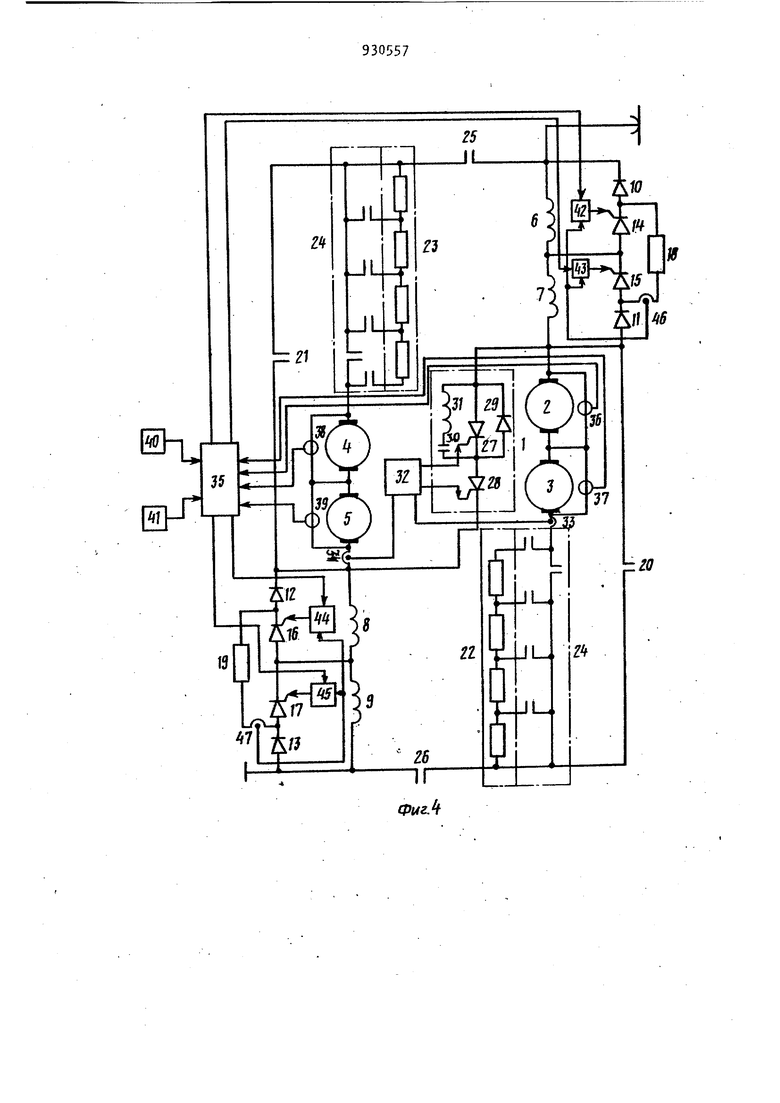
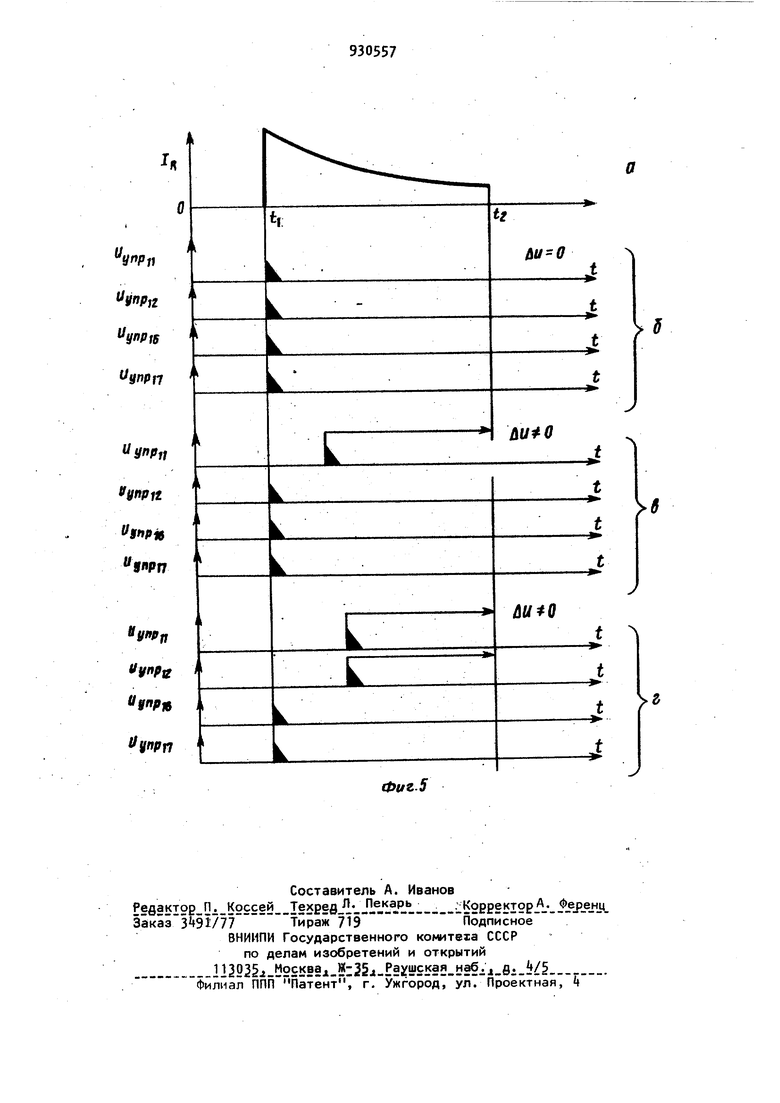
Изобретение относится к электротехнике и может быть использовано в электрическом подвижном составе для управления тяговыми электродвигателями постоянного тока. По основному авт.св. ff 851719 известен многодвигательный электропривод, содержащий две группы электродвигателей постоянного тока с последовательно включенными обмотками воз буждения, параллельно с которыми свя зан диод, два силовых контактора, через каждый из которых группа элект родвигателей подключена к источнику питания, тормозные резисторы, тормоз ные контакторы, каждый из которых включен параллельно .последовательно соединенным якорным обмоткам и тормозным резисторам одной группы элект родвигателей, и тиристорный прерыватель, якорные обмотки первой группы двигателей подключены через силовой KOHtaKTop к обмоткам возбуждения вто рой группы двигателей и к первому вы ,воду источника питания, якорные обмотки второй группы двигателей аналогично подключены к обмоткам возбуждения первой группы двигателей и второму выводу источника питания, тиристорный прерыватель включен между точками соединения якорных обмоток и обмоток возбуждения каждой группы электродвигателей П1. Недостатком этого устройства является невозможность селективного регулирования поля тяговых двигателей. Отсутствие селективного регулирования поля приводит: к недоиспользованию сцепного веса подвижного состава, так как при этом невозможно учесть разницы в нагрузках на тележки разных колесномоторных блоков в процессе реализации режимов тяги и торможения, к снижению средних значений тяговых и тормозных усилий, которое особенно значительно при возникновении аварийных режимов, таких,.например, как 6оксование и юз,поскольку при воз393никновении боксования или юза на одном из двигателей или одной группе двигателей поля ослабляются на всех двигателях обеих групп. Целью изобретения является улучшение тяговых и тормозных свойств элект ропривода путем селективного регулирования поля двигателей. Поставленная цель достигается тем, что в многодвигательный электропривод дополнительно введены два резистора и две цепочки, состоящие из последовательно соединенных дополнительного диода и первого и второго тиристоров при этом каждая цепочка включена последовательно с соответствующим диодом, так, что вывод дополнительного диЪда связан с обмотками возбуждения а вывод второго тиpiиcтopa - с выводом диода, общая точка соединения тиристоров каждой цепочки подключена к общей точке соединения соответствующих обмоток возбуждения, первь1Й вывод каждого резистора подключен к точке соединения дополнительного диода и первого тиристора соответствующей цепочки, второй вывод каждого резистора подключен к точке соединения второго тиристора и, диода той же цепочки , На фиг. 1 приведена схема устройства; на фиг. 2,3- диаграммы, иллюстрирующие характер протекания эле ромагнитных процессов в устройстве; на фиг. k - схема управления устройСТВОМ-, на фиг. 5 - диаграммы зон функционирования элементов системы в различных режимах работы. . . Устройство состоит из тиристорного прерывателя 1 , включенного в диагональ моста,образованного якорями 2-5 и обмотками возбуждения 6-9 двух групп тяговых двигателей. Обмотки возбуждения шунтированы диодами 10-13, тиристорами и резисторами 18, 19. Параллельно якорям присоединены- контакторы 20, 21, тормозные резисторы 22, 23, регулируемые реостатным контролером 2k. Между обМотками возбуждения 6, 7 и тормозным резистором 23 включен контактор мотор ного режима 25, а между обмотками воз буждения 8, 9 и тормозным резистором 23 включен контактор моторного режима 26. Тиристорный прерыватель 1 (фиг.) Содержит последовательно соединенные .тиристоры 27, 28. Параллельно тиристору 27 включены диод 29 и цепь, со4стоящая из коммутирующих конденсатора 30 и индуктивности 31, причем катод диода 29 соединен с анодом тиристора 27, а анод диода 29 соединен с , катодом тиристора 27-Блок управления 32 тиристорами прерывателем 1 присоединен к управляющим электродам тиристоров 27, 28 и датчикам тока якорей 33, З. Блок селективного регулирования поля тяговых двигателей 35 соединен с датчиками напряжения тяговых двигателей , датчиками загрузки тележек моторного вагона kQ и kl и управляемыми линиями задержки k2-kS, кроме этого, управляемые линии задержки соединены с датчиками тока , kj, Протекающего через резисторы 1, 19. Устройство работает следующим обрэзом. В моторном режиме тиристорный лрерыватель 1 обеспечивает подпитку , |рбмоток возбуждения тяговых двигателей. Регулирование поля в нормальном режиме тяги осуществляется путем изменения момента отпирания тиристоров Й-17 функции выходного напряжения датчиков загрузки 40, 41 разных тележек моторного вагона, что позволяет получить режим усиленного поля на двигателях наиболее загруженной тележки и ослабленного поля на двигателях ненагруженной тележки. Физимеская сущность описываемого процесса поясняется на фиг. 2. На фиг. 2 а иллюстрируется процесс реализации усиленного поля тяговых двигателей. В этом режиме токи Ig и 1g, протекающие через обмотки возбуждения 6, 7, замыкаются на интервале спадания тока (фиг. 3 а, а через диод 10 - тиристор 14 и Диод 11 - тиристор 15 соответственно. Максимальное усиление поля достигается при включении тиристоров 14, 15 в момент -t-i (фиг. 5 а), соответствующий окончанию проводящего состояния тиристорного прерывателя 1. При этом QQf cftr момент на валу тяговых двигателей 2, 3 будет максимальнымМтйу Ф са я К 3|.ср. md) где М - момент на валу тягового двигателя;С - постоянная тягового двигателя;3qj - средний ток якоря.; к - коэффициент пропорциональности Запуск блоков осуществляется от датчиков kB, 7. Режим ослабления поля иллюстрируется диаграммой фиг. 2 г. В этом слу чае ток возбуждения dg 3j) навсем интервале спадания dt - tti - замы кается через резистор 18 и имеет минимальное значение -ftnvih ° ° мент на валу тяговых двигателей 2, 3 будет минимальным rtlivT С - 3 К -ЗЙ.СР-ПИП Величина резисторов 18, 19 выбира ется из условия обеспечения нормальной коммутации тяговых двигателей. Аналогично процессы протекают и на второй группе тяговых двигателей. Переход из моторного режима в тор мозной осуществляется на выбеге посл отключения контакторов 25, 2б. Система реализует режим реостатного тор можения при независимом возбуждении тяговых двигателей.. Регулирование поля в тормозном ре жиме осуществляется с помощью тиристорного прерыват я 1 и изменением момента отпирания тиристоров. 14-17. Фиг. 5 б иллюстрирует процессы управ ления в системе при полном поле, Ujfte управляющий импульс соответствующего тиристора. Тиристорный прерыватель работает в режиме амплитудной модуляции. Конденсатор 30, предварительно заряженный при отпирании тиристора 27 перезаряжается через последний и коммутирующий дроссель 31. Далее осуществляется обратный перезаряд конденсатора через ;v од-29. При отпирании тиристора 28 прикладывается напряжение к нагрузке через открытый диод 29 или тиристор 27 до момента запирания диода 29. Регулирование напряжения на нагрузке осуществляется смещениемчяомента отпирания тиристора 28 относительно тиристора 27- Торможение начинается при максимальной задержке отпирания тиристора 28, что соответствует минимальному току возбуждения двигателей. При этом в цепь якорей включены тормозные сопротивления полностью. По мере уменьшения скорости, с целью поддержания тормозного то ка, осуществляется усиление поля тяговых двигателей посредством уменьшения задержки отпирания тиристора 28i При достижении полного поля осуществляется бывод ступени сопротивлений реостатным контролером. Регулирование задержки отпирания тиристора 28 осуществляется в функции выходных напряжений датчиков токов якорей 33, 3. Таким образом, поддержание тормозного тока осуществляется посредством плавного регулирования поля и дискретного изменения величины тормозного сопротивления. Коррекция тока возбуждения в функции выходного напряжения датчиков 40, 41 осуществляется таким же способом, как и в тяговом режиме. При возникновении процесса юза, например ни двигателе 2, момент отпирания тиристора И регулируется в функции разности напряжений ДЦ на двигателях 2, 3.- При этом ток З х Dgi} протекает через tHpHCTPP 15, резистор 18, диод 10. Харгистер протекания электромагнитных 1тррце ;(хэв представлен на диаграмме фиг. 3 б- Фиг. 5 в иллюстрирует процессы управления в системе в этом режиме. При возникновении юза на двигателях 2, 3 момент отпирания тирйстбров 14, 15 регулируется в функции разности напряжения дО групп ;двигателей 2, 3 и 4, 5. В этом случае ток вл ЗвЧ Звттнппротекает через .резистор 18, диоды 10, 11 и обмотки возбуждения 6, 7Г(Фиг. 2 и |)иг. Зв)Процессы управления для этого режима показаны на диаграмме фиг. 5 г. 8 режиме тяги процессы боксования также локализуются. Преимуществом данного устройства для управления многодвигательным при-у водом является улучшение динамических показателей электропоездов, что позволяет повысить пропускную способ- ; ность головных участков крупных жеезнодорожных узлов и уменьшает влия-: ние пригородного движения на пропуск грузовых поездов. .Формула изобретения Многодвигательный электропривод по ав.св. If 851719, отли чаюи и с я тем, что, с целью улучшения тяговых и тормозных свойств -электропривода путем селективного регулиования поля двигателей, в него доолнительно введены два резистора и ве цепочки, состоящие из последовательно соединенных дополнительного диода и первого и второго тиристоров, при этом кажддя цепочка включена последовательно с соответствущиммдиодом так что вывод дополнительного диода свяэдн с обмотками возбуждения, а ёывод второго тиристора - с выводом диода, общая точка соединения тиристоров каждой цепочки подключена к общей точке соединения соответствующих обмоток возбуждения, первый; 9305 to 78 вывод каждого резистора подключен к точке соединения дополнительного диода и первого тиристора соотйетствующей цепочки, второй вывод каждого резистора подключен к точке соединения второго тиристора и диода той же цепочки. . Источники информации, Iпринятые во внимание П0И экспертизе 1. Авторское свидетельство СССР ;№ 851719, кл. Н 02 Р 7/68, 1979
ю
Ifif
-6
щ
аЬа-1
ywx
:-:7:,.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод | 1979 |
|
SU851719A1 |
| Многодвигательный тяговый электропривод | 1990 |
|
SU1824663A1 |
| Многодвигательный электропривод | 1981 |
|
SU974529A1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С ТИРИСТОРНЫМ УПРАВЛЕНИЕМ | 2001 |
|
RU2208530C2 |
| Устройство для управления электроприводом,например, моторного вагона | 1982 |
|
SU1052433A1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С ТИРИСТОРНЫМ УПРАВЛЕНИЕМ | 2004 |
|
RU2260520C1 |
| Многодвигательный электропривод | 1990 |
|
SU1818676A1 |
| Многодвигательный электропривод | 1980 |
|
SU974528A1 |
| Устройство для электрического торможения электроподвижного состава | 1980 |
|
SU874404A2 |
| Устройство для управления электроприводом | 1982 |
|
SU1051680A1 |
Ф|ге7
Ч В,
.тел
81 Btmin liCffm
ФигЪ n.
