Изобретение относится к судостроению, в частности к электрогидравлическим судовым рулевым машинам.
.Известна электрогидравлическая судовая рулевая маииина, содержгицая многокамерный силовой исполнительный механизм, плунжеры которого кинематически связаны с баллером руля, а полости гидравлически сообщены с напорно-сливными магистралями, электрически управляемым клапаном кольцевания и источником питания 1.
Недостатком данного технического решения является то, что оно не обеспечивает автоматическое регулирование скорости перекладки в зависимости от нагрузки на баллере руля, что снижает надежность работы рулевой машины.
Цель изобретения - повышейие эффективности путем обеспечения автоматигческого электрогидравлического ступеичатого регулирования скорости перекладки руля в зависимости от нагрузки на баллере.
Цель достигается тем, что рулевая машина снабжена датчиками давления с электрическими контакторами, соленоидами управления, подпружинеиньми электромагнитными реле с электрнческими контакторами, соединенными между собой электрическими цепями управления, при этом на каждой напорной магистрали, которыми связаны полости силового исполнительного механизма с источником питания, установлены по два датчика давления с электрическими контакторс1ми, а в электрической цепи управления клапаном кольцевания установлены соленоиды управления и электромагнитные реле с электрическими контакторами, причем электрическая цепь управления клапаном кольцевания последовательно замкнута .контакторами одного датчика давления и через контакторы подпружиненного электромагнитного реле контакторами другого датчика давления, установленного на той же напорной магистра20ли, что и первый датчик давления.
Электрические цепи датчиков давления параллельно соединены между собой.
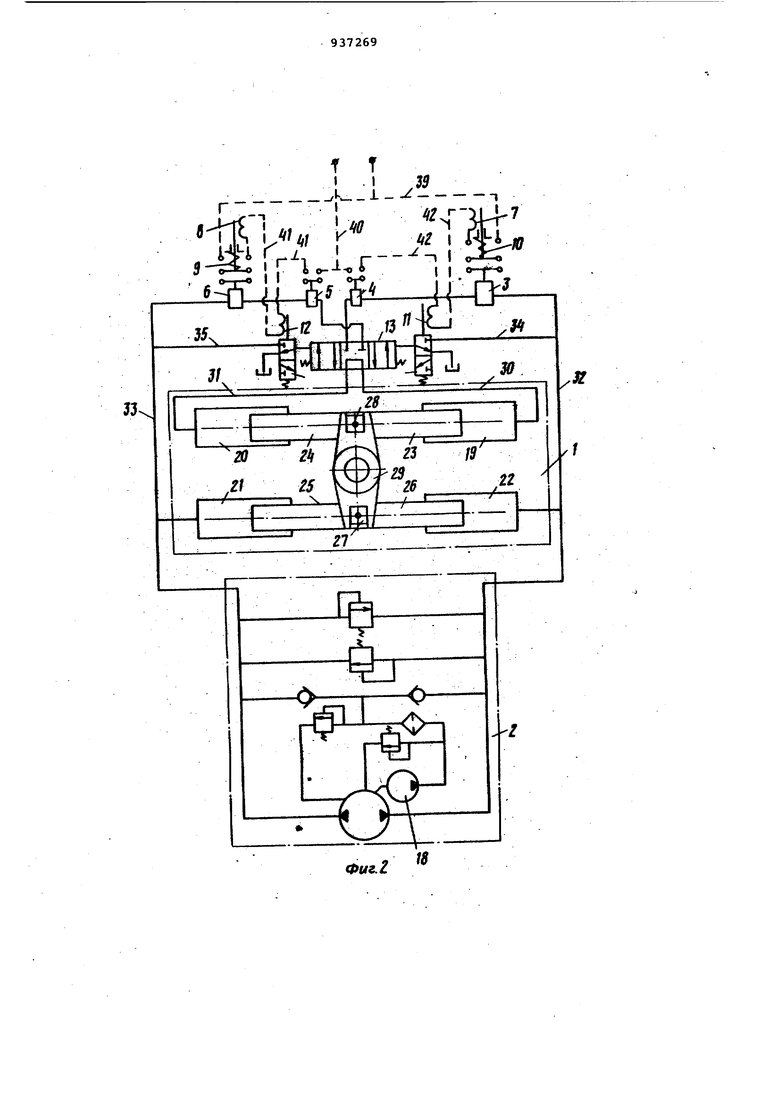
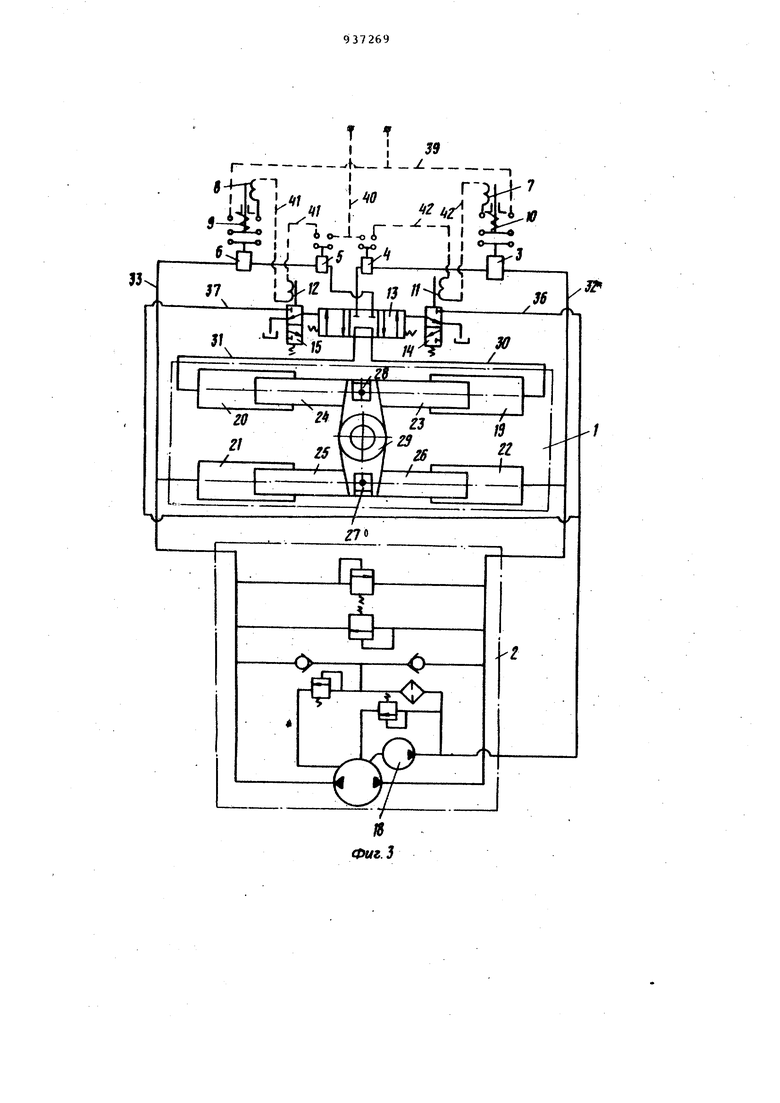
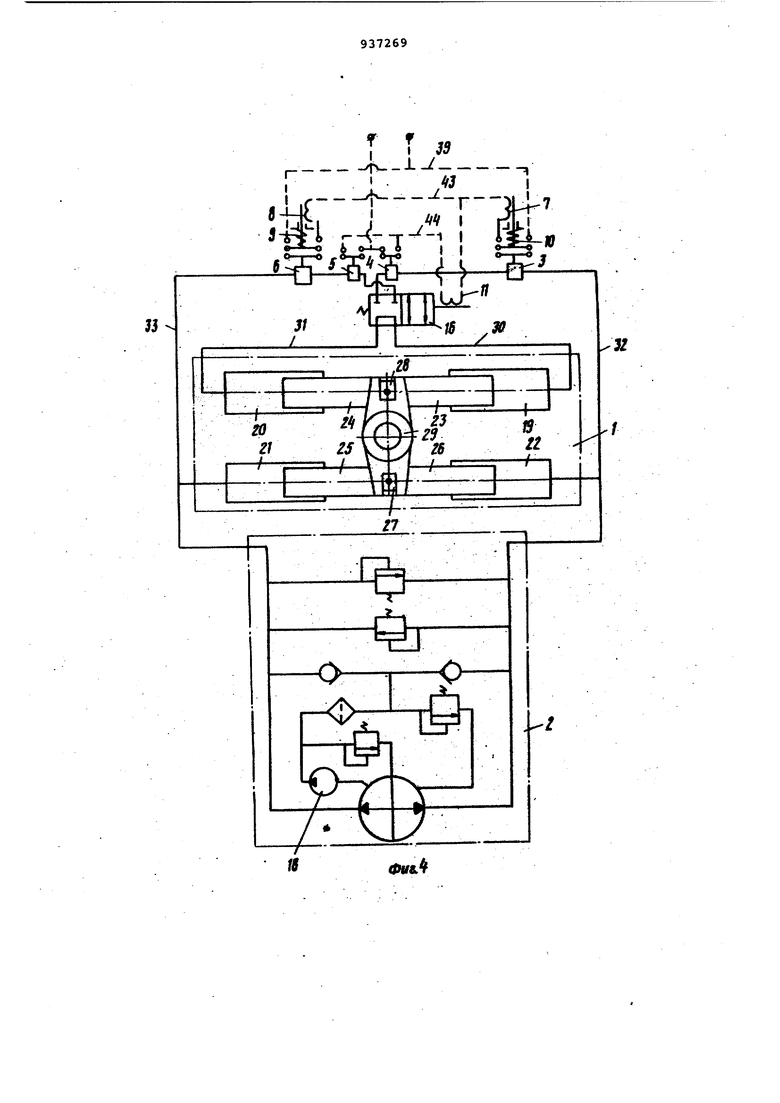
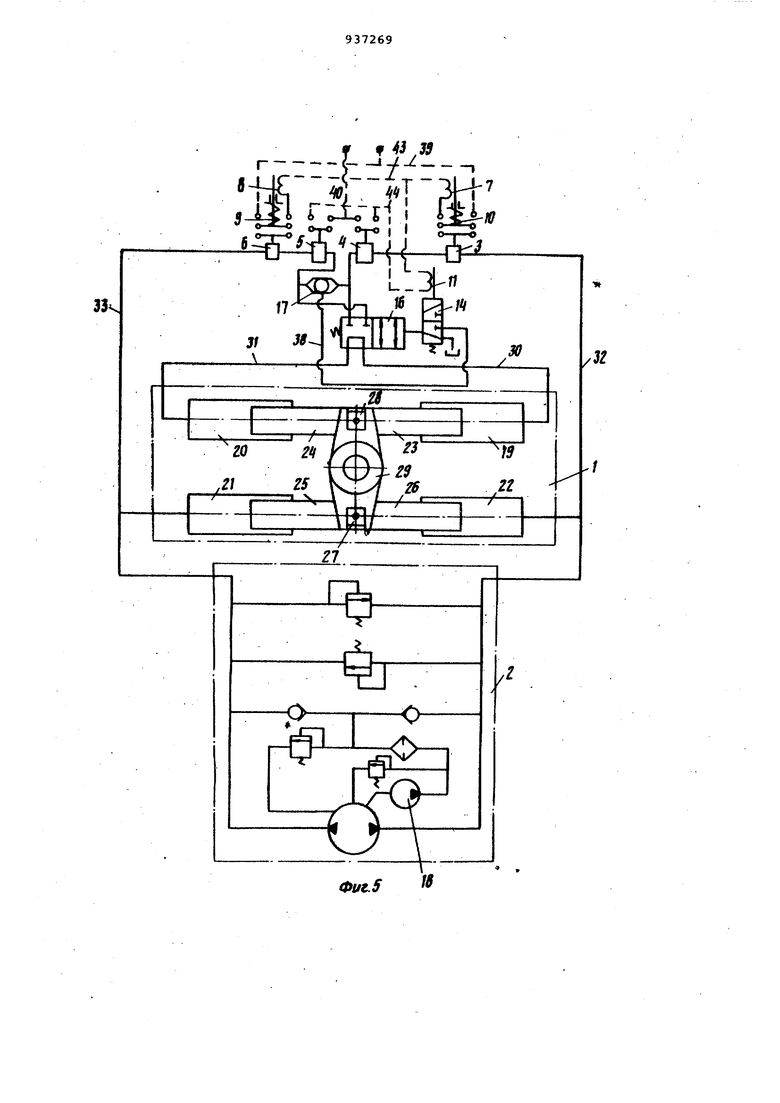
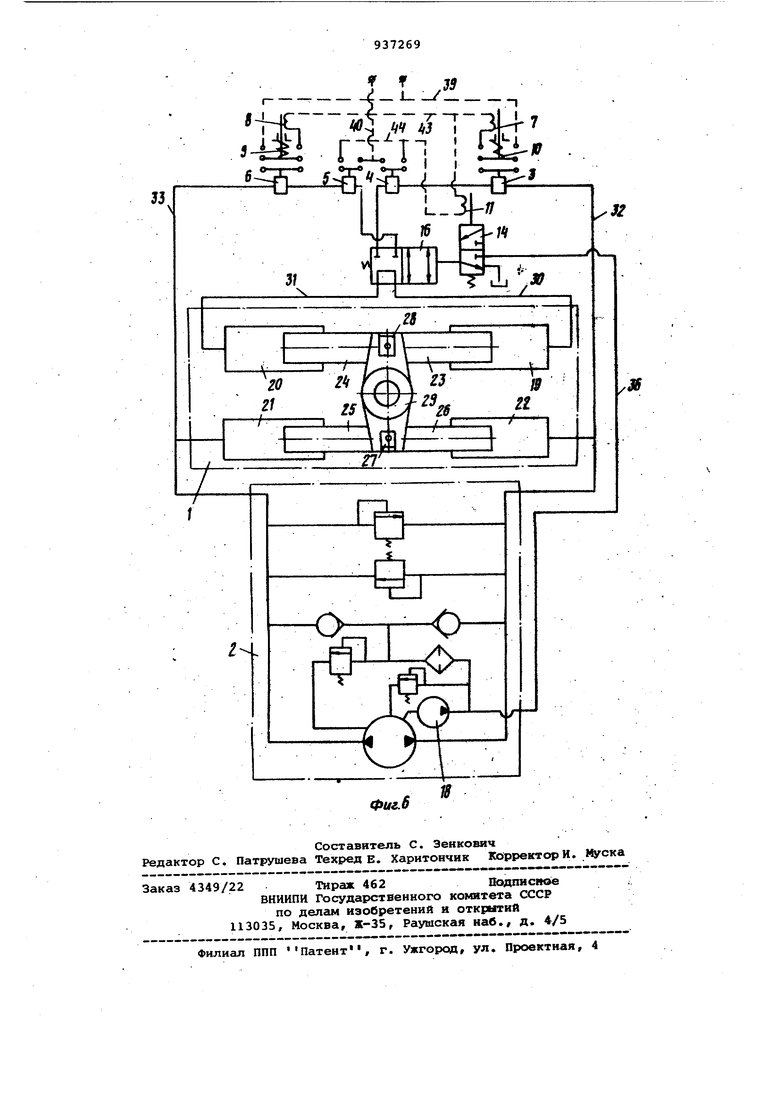
На фиг. 1 изображена принципиальная схема электрогидравлической судовой рулевой машины; на фиг. 2 то же, с двухступенчатым трехпозици- . онным электрогидравлическим клапаном кольцевания; на фиг. 3 - то же, с подключением двухступенчатого электрогидравлического трехпозиционного клапана кольцевания к вспомогательному насосу управления и подпитки ги равлического источника питания с насосом переменной производительности на фиг.. 4-то же, с электромагнитом управл1ения, установленным на двухпозиционном клапане кольцевания; на фиг. 5 - то же, с двухступенчатым двухпозиционным электрогидравлическим клапаном кольцевания; на фиг.6 то же, с подключением двухпозиционного двухступенчатого клапана кольцевания к вспомогательному насосу управления и подпитки гидр&влического источника питания с насосом переменной производительности. Электрогидравлическая рулевая машина содержит силовой исполнительнйй механизм 1 многокамерной констру ции , гидравлический источник 2 питания, датчики 3-6 давления, электро магнитные реле 7-8 с пружинами 9-10 электромагниты 11-12 управления, трехпозиционный клапан 13 кольцевания, электрогндравлические клапаны 14-15, двухпозиционный клапан 16 кольцевания, гидроклапан 17 ИЛИ, нарос 18 управления и подпитки. Силовой исполнитёлькый механизм 1состоит из четырех цилиндров 19-2 плунжеров 23-26, со единенных через шарнирал 27-28 с румпелем 29. Гидравлическ51е элементы рух;евой шины соединены между собой напорносливными магистралями 30-38, а элек трические - электрическимицепями 39-44. Электрогидравлическая рулевая ма шина работает следующим образом. При среднем положении руля и отсутствии подачи рабочей жидкости от гидравлического источника 2 питания камеры цилиндров 19-20 силового исполнительного механизма 1 закольцо ваны через клапан 13 кольцевания и магистрали 30-31, а камеры цилиндро 21-22 соединены с источником питани и. клапаном 13 кольцевания магистралями 32-33,. к контактам электромагнитных реле 7 и 8 подведено нйпряже ние по электр1ической цепи 39, а к контактам датчиков 4-5 давлений напряжение подведено по цепи 40. При задании угла перекладки, например на левый борт (по часовой стрелке), рабочая жидкость от источ ника 2 питания по магистрали 32 поступает в камеру цилиндра 22, вызывая перемещение плунжеров 26 влево, а из камеры цилиндра 21 рабочая жид кость вытесняется плунжером 25 и по магистрали 33 поступает к источнику 2питания. Рабочая жидкость из камеры цилин ра 19 вытесняется плунжером 23 через магистраль 30, клапан 13кольце вания, магистраль 31 в освобождаемую плунжером 24 камеру цилиндра 20. Движение плунжеров происходит за счет их кинематической связи через шарниры 27-28 и румпель 29. Доступ рабочей жидкости от источника 2 питания в камеру цилиндра 20 и из камеры цилиндра 19 к источнику 2 питания блокирован клапаном 13 кольцевания до тех пор, пока давление рабочей жидкости в камере цилиндра 22, возрастающее с ростом внешней нагрузки на руле, не преодолеет усилие, на которое настроены датчики 3-4 давления/ установленные в магистрали 32 и соединенные этой магистралью с цилиндром 22 и источником 2 питания, причем если датчик 3 давления настроен на давление срабатывания - предельное давление при котором необходимо подключение в работу второй пары цилиндр ов, то датчик 4 давления, настроен на давление меньшее половины давления срабатывания датчика -3 давления. При достижении в цилиндре 22 этого давления датчик 4 давления срабатывает, ег,о контакторы замкнут электрическую цепь 40,42, подготовив электрическую цепь электромагнита 11 управления, клапана 13 кольцевания 13 к работе. При достижении в цилиндре 22 предельного давления сработает датчик 3 давления и его контакто ал, воздействуя на контакторы электромагнитного реле 7, замкнут электрическую цепь 39,42, при этом электромагнит 11 управления клапана 13 кольцевания и электромагнит электромагнитного реле 7 окажутся под напряжением. Электромагнит 11 переключит клапан 13 кольцевания в крайнее левое положение, при этом цилиндр 20 по магистралям 31-32 соединится с цилиндрод4 22 и с напорной магистралью гидравлического источника 2 питания, а цилиндр 19 по магистралям 30 и 33 соединится с цилиндром 21 и с всасываюЕ еЙ (сливной) магистралью гидравлического источника 2 питания. Вступление в работу цилиндра 20 вследствие увеличенй;н рабочей плсяцади плунжеров в два раза приводит к скачкообразному снижению давления в два раза в цилиндрах 20 и 22, а также магистралях 31-32, при этом срабатывает датчик 3 давления и его контактоЕ«л разомкнутся с контакторами подпружиненного электромагнитного реле 7, однако электри /еская цепь 40,42, 39 останется под напряжением, удерживая электромагнитом 11 клапан 13 кольцевания в крайнем левом положении вследствие того, что электромагнит электромагнитного реле 7 будет продолжать удерживать свои контакторы в замкнутом положении с контакторами электрической цепи 39,42.
Дальнейшая работа электрогидравлической рулевой машины при увеличении нагрузки на реле производится четырьмя цилиндрами. При уменьшении нагрузки на руле и снижении давления в гидросистеме до величины настройки датчика 4 давления последнее сработает и разомкнет своими контакторами электрическую цепь 40,42 обесточив электромагнит электромагнитного реле 7, контакторы которого под действием пружины 10 разомкнут электрическую цепь 39,42. Электромагнит И управления обесточится и клапан 13 кольцевания вернется в среднее положение, при этом цилиндры 19-20 по магистралям 30-31 через клапан 13 кольцевания закольцуются.
Вследствие уменьшения рабочей пло щади плунжеров в два- раза, давление в цилиндре 22 и магистрали 32 увеличится также в два раза, при этом датчик 4 давления сработает, замкнув свими контакторами электрическую цепь 40,42, однако электрическая цепь 39, 42 останется разомкнутой вследствие того, что датчик 3 давления не сработает (величина возросшего давления меньше давления срабатывания датчика 3 давления) и электромагнит 11 и электро:лагнит электромагнитного реле 7 останутся обесточенными, а клапан 13 кольцевания останется в среднем положении.
,г
При дальнейшем уменьшении давлени датчик 4 давления вторично сработает и его контакторы разомкнут электричекую цепь 40,42.
Электромагнит 12, а также элекТро магнит электромагнитного реле 8 во всё время движения руля по часовой стрелке остаются обесточенными вследствие того, что датчики 5 и 6 давления установленные в магистрали 33 находятся под давлением всасывания (слива) гидравлического источника 2. питания.
При обратном перемещении руля с левого борта к нулю против часовой стралки напорной становится магистраль 33, а в магистрали 32 давление подается до величины подпитки .(слива гидравлического источника 2 питания.
Рабочая жидкость, поступающая в цилиндр 21, воздействует на плунжер |25, а плунжером 26 рабочая жшхкость из цилиндра 22 вытесняется в магистраль 32, соединенную с гидравлическим источником 2 питания.
Румпель 29 через шарнир 27 получа ет движение от плунжеров 25 и 26, а через шарнир 28 передает движение плунжерам 23,24,при этом рабочая жидкость нз цилиндра 20 перетекает в цилиндр 19.
В случае роста давления в цилиндре 21 и магистрали 33 (увеличение внешней нагрузки на пере руля) и при достижении им величины настройки датчика 5 давления (меньшее половины давления срабатывания датчика 6 давления) последний срабатывает и его контакторы Зё№1кнут электрическую цеп 40,41, подготовив электрическую цепь электромагнита 12 управления клапана 13 кольцевания к работе.
При достижении в цилиндре 21 предельного давления сработает датчик 6 давления и его контакторы, воздействуя На контакторы электромагнитного реле 8, замкнут электрическую цепь 39,41, при этом электромагнит 12 управления клапана 13 кольцевания и электромагнит электромагнитного В окажутся под напряжением. Электромагнит 12 переключит клапан 13 кольцевания в крайнее правое положение, при этом цилиндр 19 по магистралям 30,33 соединится с цилиндром 21 и с напорной магистралью гидравлического источника 2 питания, а цилиндр 20 по магистралям 31,32 соединится с цилиндром 22 к с вЪасывающей (сливно магистралью гидравлического источник 2 питания.
Вступление в работу цилиндра 19, вследствие увеличения рабочей площади плунжеров в два раза, приводит к скачкообразному снижению давления в два раза в цилиндрах 19,21, а также магистралях 30,33, при этом срабатывает датчик 6 давления и его контакторы разомкнутся с контакторами подпружиненного электЕюмагнитного реле 8, однако электрическая цепь 39-41 останется под напряжением, удерживая электромагнитом 12 клапан 13 кольцевания в крайнем правом положении, вследствие того, что эле1стромагнит электромагнитного реле 8 будет продолжать удерживать свои контакторы в замкнутом положении с контактами электрической цепи 39,41,при этс все цилиндры будут соединены с гидравлическим источником 2 питания и совершать необходимую работу.
При дальнейшем движении руля к среднему положению и уменьшении нагрузки на руле в гидросистеме рулевой машины происходит понижение давления. При понижении давления до величины срабатывания датчика 5 давления, последний сработает и разомкнет своими контакторами электрическую цепь 40,41, обесточив электромагнит электромагнитного реле 8, контакторы которого под действнем пружнны 9 разомнут электрическую цепь 39,41.
Электромагнит 12 управления обесточится и клапан 13 кольцевания вернется в среднее положение, пг« этом цилиндры 19-20 по магистралям 30-31 череэ клапан 13 кольцевания закольцуются. Вследствие уменьшения рабочей пло Щсши плунжеров в два раза давление в цилиндре 21 и магистрали 33 увеличится также в два раза, при этом дат чик 5 давления сработает, замкнув своими контакторами электрическую цепь 40-41., однако электрическая цепь 39,41 останется разомкнутой вследствие того, что датчик б не сра ботаёт (величина возросшего давлени (Меньше величины срабатывания датчика 6 давления) и электромагнит 12 и эле тромагнит электромагнитного реле 8 останутся обесточенными, а клапан 13 кольцевания останется в среднем положении. При подходе руля к среднему положению происходит дальнейшее уменьшение давления, при этом датчик 5 давления вторично сработает и его контакторы разомкнут электрическую цепь 40,41. Электромагнит 11, а также электро магнит электромагнитного реле 7 во все время движения руля с левого бор та к нулю {против часовой стрелки) остаются обесточенными вследствие того, что датчики 3 и 4 давления соединены с всасывающей (сливной) магистралью 32. Работа элекгрогидравлической руле вой машины от среднего положения на правый борт (против часовой стрелки) и обратно к среднему положению проис ходит аналогично описаннойработе машины от среднего положения на левый борт и обратно. Работа электрогидравлической рулевой машины, представленной на фиг. аналогична работе машины по фиг. 1. Отличительным является то, что .клапан 13 кольцевания выполнен двухступенчатым с гидравлическим усилени ем, при этом гидравлическое управление на клапан 13 кольцевания поступа ет от магистралей 32-33 .по магистралям 34-35 через электрогидравлические клапаны 14-15, электромагниты 11 и 12, которые электрически соединены с датчиками давления и электромагнит иыми реле по схеме фиг. 1, при этом, если напорной магистралью является магистраль 32, то при срабатывании электромагнита 11 давление по магист рали 34 через электрогидравлический клапан 14 поступает в правую полость управления клапаном 13 кольцевания, перемещая его в крайнее левое Положе ние, обеспечивая работу всех цилиндров на румпель 29 и соединяя их с гидравлическим источником 2 питания. При срабатывании электромагнита 12 клапан 13 кольцевания давлением от магистрали 33 по магистрали 35 через электрогидравлический клапан 15 перемещается в крайнее правое иоложение, соединяя также все цилиндры силового исполнительного механизма 1 с гидравлическим источником 2 питания. Работа электрогидравлической рулевой мaJJJины, представленной на фиг. 3, аналогична работе машины фиг. 2. Отличительным является то, что гидравлические полости электрогидравлических клапанов 14-15 соединены магистралями 36-37 со вспомогательным насосом 18 управления и подпитки гидравлического источника 2 питания с насосом (не обозначен) переменной производительности и при срабатывании электромагнитов 11-12 управления, установленных на электрогидржвлических клапанах 14-15, клапан 13 кольцева ния управляется давлением, развиваемым вспомогательньм насосом 18. Работа электрогидравлической рулевой машины на фиг. 4 аналогична работе машины на фиг. 1, отличительным является то, что электрические контакты электромагнитных реле 7-8 соединены между собой электрической цепью 43, а электрические контакты датчиков 4-5 давлений соединены электрической цепью 44. . В цепь 43,44 подключен электромагнит И управления двухпозиционного клапана 16 кольцевания. Параллельное соединение, между собой электрических хепей датчиков 4-5 давлений и элект жческих цепей датчиков 3,6 давлений с последовательным подключением в эти цепи электромагнита 11 управления позволяет попеременно управлять этим электромагнитом и осуществлять автоматическое переключение двухпозицнонного клапана 16 кольцевания от датчиков 3,4 или 5,6 в зависимости от того, какая магистраль 32 или 33 соединена с напором гидравлического источника 2 питания. При этом, если нагнетательной является магистраль 32, электрическая цепь электромагнита 11 будет замкнута следующим образом: цепь 40 - контакторы датчика 4 давления - цепь 44 - электромагнит 11 управления цепь 43 - контакторы датчика 3 давления и электромагнитного реле 7 цепь 39. Если нагнетательной является магистраль 33, то электрическая цепь электромагнита 11 управления заиллкается через цепь 40 - контакторы датчика 5 давления - цепь 44 - электромагнит 11 yпpaвJIeния - цепь 43 - контакторы датчика 6 давления и электромагнитного реле 8 - цепь 39. Работа электрогидравлической рулевой машины на фнг. Ь аналогична работе маишны фиг. 4. Отличительным является то, что двухпозиционный клапан Iff кольцевания выполнен двухступенчатым с гидравлическим усилением, при этом гидравли |еское управление на клапан 16 кольцевания поступает от магистралей 32-33 через гидроклапан 17 ИЛИ по магистрали 38, соединенной с электро гидравлическим клапаном 14, электрически управляемым датчикс ми 3-4 или 5-6 в зависимости от того, какой является иагиетательиая магистраль 32 или 33. Работа электрогидравлической руле вой машины иа фиг. 6 аналогична работе машины фиг. 5, отличительным является то, что электрогидравлический клапан 14 как и в случае, изображенном на фиг. 3, соедииен магистралью 36 со вспомогательным насосом 18 управления и подпитки гидравличес кого источника 2 питания с иасосом перемеиной производительности, и уп Давление двухпозиционным клапаном 16 кольцевания .осуществляется через электрогидравлический клапан 14 давления, развиваемым иасосом 18. Таким образом, данное техническое решение обеспечивает автоматическое электрогидравлическое ступенчатое ре гулирование скорости перекладки от нагрузки иа бёшлере руля, что повышает иадежность работы рулевой мгииин Формула изобретения 1. Электрогидравлическая судовая рулеваяА ашина, содержащая миогокамерный силовой исполнительный механизм, плунжеры которого кинематичёс-ки связаны с баллером руля, а полости гидравлически сообщены с иапорносливными магистралями, электрически управляемым клапаном кольцевания и , источником питания, о т л и ч а ющ а я с я тем, что, с целыр повииекия эффективности путем обеспечения автоматического электрогидравлического ступенчатого регулирования скорости перекладки руля в зависимости . от нагрузки иа баллере, она снабжена датчиками давления с электрическими контакторами, соленоидё1ми управления, подпружиненными электромагнитными реле с электрическими контакторами, соединенными между собой электрическими цепями управления, при этом на каждой напорной магистрали, которьлта связаны полости силового исполнительного механизма с источником питаиия, установлены по два дат- чика давления с электрическими контакторами, а в электрической цепи управления клапаном кольцевания установлены соленоиды управления и электромагнитные реле с электртгческими контакторами, причем электрическая цепь управления клапаном кольцевания последовательно замкнута контакторами одного датчика давления и .через контакторы электромагнитного реле контакторами доугого датчика давления, установленного на той же напорной магистрали , что и первый датчик давления. 2. Машина поп. 1, отлича ющ а я с я тем, что электрические цепи датчиков давления параллельно соединены между собой. Источники информации, принятые во внимание при эксттертмзе 1. Авторское свидетельство СССР № 540769, кл. В 63 Н 25/30, 1974.
т т J9
.| J -.
7
1л., «d 3-Г
Ци
Ii. A,J,(
а
V Т т Л I J Лг


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электрогидравлической многокамерной рулевой машиной | 1983 |
|
SU1123938A1 |
| Электрогидравлическая рулевая машина | 1981 |
|
SU1047779A1 |
| Электрогидравлическая рулевая машина | 1983 |
|
SU1115967A1 |
| Электрогидравлическая рулевая машина | 1981 |
|
SU994340A1 |
| Электрогидравлическая рулевая машина | 1983 |
|
SU1111943A1 |
| Электрогидравлическая судовая рулевая машина | 1981 |
|
SU958226A1 |
| Электрогидравлическая рулевая машина | 1982 |
|
SU1041418A1 |
| Электрогидравлическая рулевая машина | 1983 |
|
SU1119928A1 |
| Электрогидравлическая рулевая машина | 1983 |
|
SU1111944A1 |
| Гидравлический привод судовой рулевой машины | 1980 |
|
SU937268A1 |

X
33
Фиъ.1
J/ -У
18
18
Фиг. 2 ,1,± 5-4-г -п rV К-гI 6 о--1ч А
39
Фиг.З .Г-ЭЫ-7 .1 -
1
. --L
if 47j4
«45 ь i Д« 11 I
« - « 1
.
