(5) ПЛАНЕТАРНЫЙ МЕХАНИЗМ С ГИБКОЙ СВЯЗЬЮ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для преобразования вращательного движения в поступательное | 1978 |
|
SU769153A1 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 2016 |
|
RU2620278C2 |
| Лесопильная рама | 1988 |
|
SU1518119A1 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА С РЕГУЛИРУЕМЫМ ПЕРЕДАТОЧНЫМ ОТНОШЕНИЕМ | 2019 |
|
RU2712714C1 |
| ПРИВОД КОЛЕСА ВЕЛОСИПЕДА | 2015 |
|
RU2622734C2 |
| Манипулятор | 1979 |
|
SU871991A1 |
| Педальный привод (варианты) | 2016 |
|
RU2651314C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РЕКУПЕРАТИВНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2001 |
|
RU2210849C1 |
| Бурильная машина | 2002 |
|
RU2224076C1 |
| ПРЕОБРАЗУЮЩИЙ ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ | 2001 |
|
RU2193127C1 |
1
Изобретение относится к машино строению и может быть использовано в конструкциях манипуляторов, станков и пр.
Известна карданная зубчатая пере- j дача, содержащая центральное колесо, водило, паразитный и основной сателлиты, ведомое звено, связанное с основным сателлитом и совершающее поступательное движение 1. ю
При этом движение ведомого звена равномерное.
Наиболее близким по технической сущности к изобретению является пла- 15 нетарный механизм, содержащий установленное на оси водило, центральное звено и сателлит, охваченные гибкой связью, и ведомый элемент, установленный на сателлите 2.20
Центральное звено выполнено в виде круглого колеса, что определяет постоянство по углу поворота водила передаточного числа механизма.
Цель изобретения - получение переменного по углу поворота водила передаточного числа механизма, повышение технологичност;и изготовления.
Для достижения поставленной цели в планетарном механизме с гибкой связью, содержащем установленное на оси водило, центральное звено и сателлит, охваченные гибкой связью, и ведомый элемент, установленный на сателлите, центральное звено выполняется некруглым, а одна из ветвей гибкой связи снабжается упругим элементом.
При этом гибкая связь закрепляется на неподвижном шарнире, а централь ное звено установлено с возможностью (| 1ксированного поворота относительно оси водила.
Центральное звено образовано по меньшей мере двумя круглыми колесами,
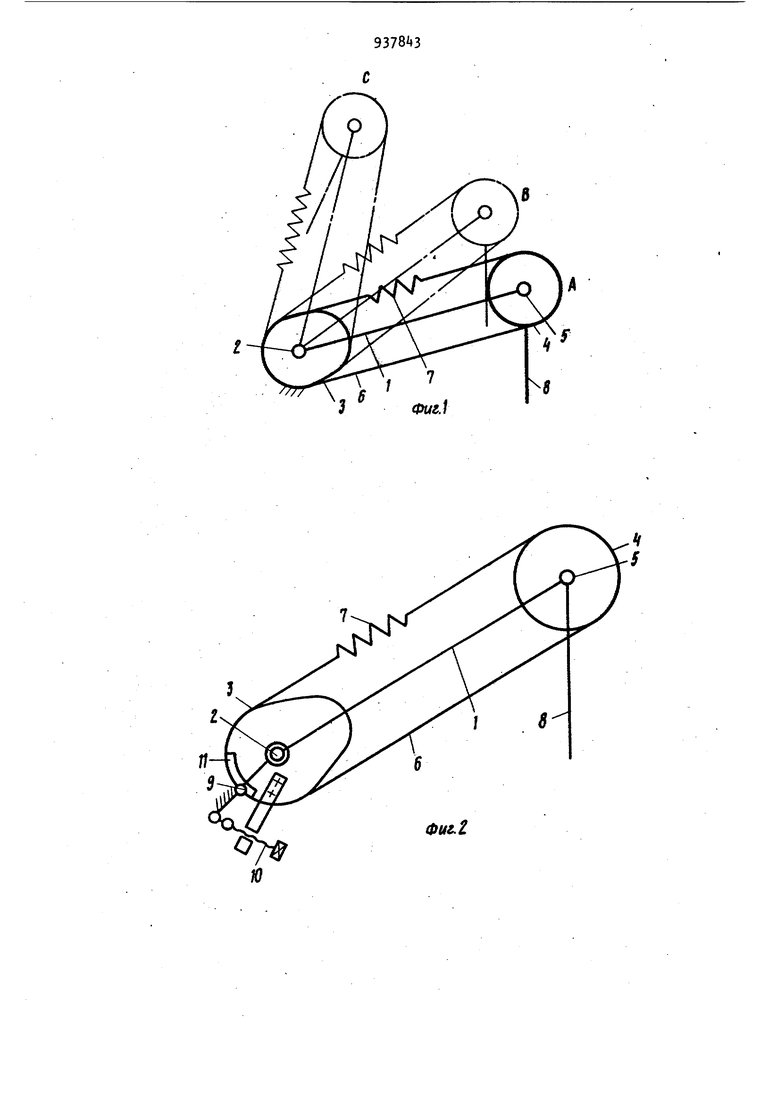
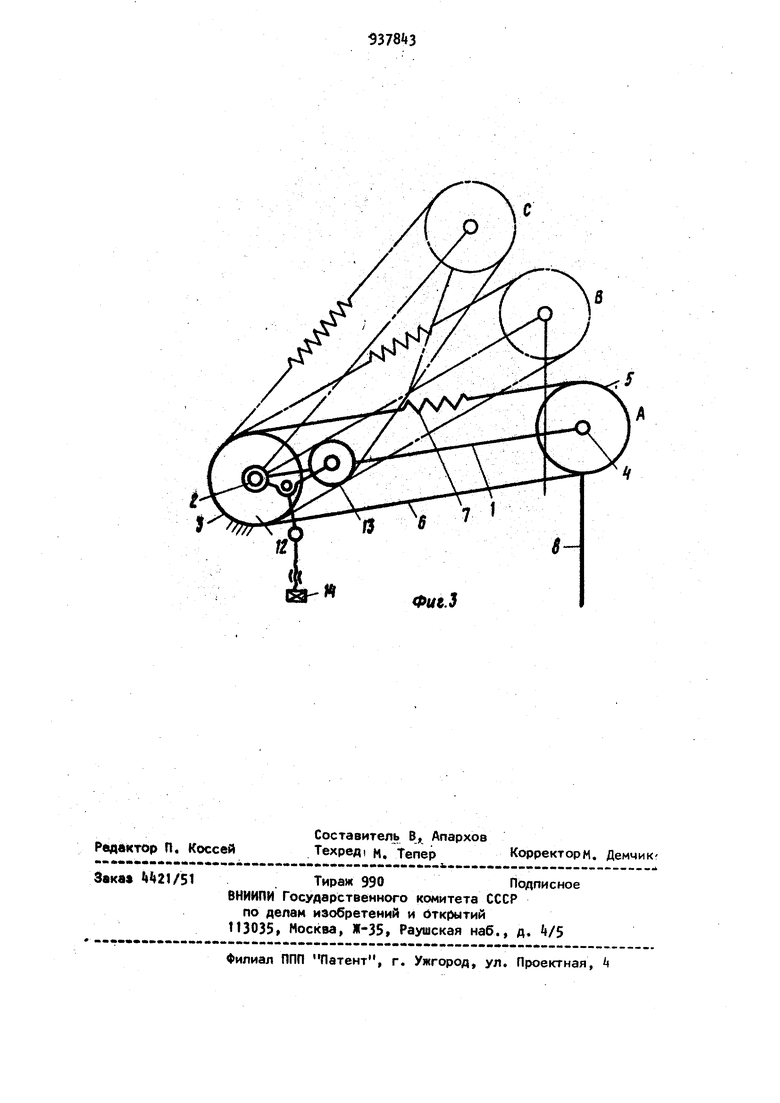
Круглые колеса рекомендуется устанавливать с возможностью изменения их взаимного положения. На фиго 1 представлена кинематическая схема планетарного механизма применительно, например, к неполноповоротному приводу руки манипулятора; на фиг. 2 - вариант кинематической схемы, в котором центральный элемент установлен с возможностью фиксированного поворота; на фиг. 3 вариант с составным центральным зве™ ном Механизм содержит водило 1, установленное на оси 2, некруглое затормрженное центральное звено 3 и сателлит t, установленный на оси 5 водила 1. Часть поверхности звена 3 очерчена радиусом, равным радиусу .сателлита k. Последний и центральное звено 3 охвачены гибкой связью 6, в одной из ветвей которой установлен упругий элемент 7. С осью 5 сателлита k жестко связан ведомый элемент З Если в качестве гибкойсвязи 6 используется цепь, .а некруглое централ ное звено 3 выполнено с гладкой поверхностью обката (фиг. 2), то цепь может быть закреплена с помощью шарнира 9 С помощью винтового механизма 10 звено 3 может вращаться относительно оси 2. Шарнир 9 при этом остается неподвижным. Для лучшего прилегания гибкой связи к центрадьному звену 3 в последнем выполнен паз 11, распространяющийся на всю зо ну регулирования положения звена . В случае использования цепи в качестбе гибкой связи 6 центральное звено 3 может быть выполнено состоя щим из нескольких (по меньшей мере из двух) мастей, представляющих собой круглые звездочки 12 и 13, изготовление которых гораздо технологич нее по сравнению с некруглыми. Взаимное положение звездочек 12 и 13 может меняться с помощью винтового механизма kc Планетарный механизм с гибкой связью работает следующим образом. вращении водила 1 против часовой стрелки происходит обкатка сателлита k вокруг центрального звена 3. Когда гибкая связь 6 контактирует с той частью звена 3, которая имеет радиус кривизны, равный радиусу сателлита , ведомый элемент 8 в своем абсолютном движении перемещается параллельно самому себе. При набегании гибкой связи 6 на центральный элемент 3 с радиусом кривизны, отличающимся от радиуса сателлита 6, последний начинает вращаться в абсолютном движении, увлекая за собой ведомый элемент 8о При этом длина гибкой связи увеличивается за счет растяжения упругого элемента 7. Далее водило 1 совершает возвратное вращение. Регулирование закона движения ведомого элемента 8 осуществляется с помощью винтовых механизмов 10 (фиг. 2) и Л4 (фиг. 3) . Применение планетарного механизма, например, в манипуляторах позволяет упростить конструкцию Последних и систему управления. Формула изобретения 1„ Планетарный механизм с гибкой связью, содержащий установленное на оси водило, центральное звено и Сателлит, охваченные гибкой связью, и ведомый элемент, установленный на сателлите, отличающийс я тем, что, с целью получения переменного по углу поворота водила передаточного числа механизма, центральное звено выполнено некруглым, а одна из ветвей гибкой связи снабжена упругим элементом. 2.Механизм по По 1, отличающийся тем, что, с целью изменения закона движения ведомого элемента, гибкая связь закреплена на неподвижном шарнире, а центральное звено установлено с возможностью фиксированного поворота относительно оси водила. 3.Механизм по п. 1, о т л и ч.ающийся тем, что, с целью повышения технологичности изготовления, центральное звено образовано по м%ньшей мере двумя круглыми колесами, k. Механизм по пп. 1 и 3, отличающийся тем, что круглые колеса установлены с возможностью изменения их .взаимного положения. Источники информации, принятые во внимание при экспертизе 1.Кожевников С.Н. и др. Механизмы, М., Машиностроение, 1976, с. , рис. 9, 19. 2.Артоболевский И.И. Механизмы в современной технике. М., Наука, 1979, с. 153, рис. 1767 (прототип)
0
Фиг.1
