(St) ВИНТОВОЙ МЕХАНИЗМ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для нанесения покрытий | 1979 |
|
SU825175A1 |
| Устройство для преобразования вращательного движения в возвратно-поступательное с регулированием величины хода | 1979 |
|
SU863945A1 |
| Устройство для преобразования вращательного движения в возвратно-поступательное с регулированием величины хода | 1983 |
|
SU1142682A1 |
| Устройство для определения гибкости обуви | 1989 |
|
SU1716378A1 |
| Устройство для натяжения сетки трафаретной печатной формы | 1987 |
|
SU1466959A1 |
| Устройство для ориентации, наживления и навинчивания гаек | 1977 |
|
SU743857A1 |
| УСТРОЙСТВО для НЕПРЕРЫВНОЙ НАМОТКИ НА КАТУШКИ НИТЕОБРАЗНЫХ МАТЕРИАЛОВ | 1973 |
|
SU394124A1 |
| ЗАЖИМНОЕ ПРИСПОСОБЛЕНИЕ | 1992 |
|
RU2021879C1 |
| ТРАНСПОРТНЫЙ УНИВЕРСАЛЬНЫЙ ВАРИАТОР АВТОМАТИЧЕСКОГО ДЕЙСТВИЯ "ТРАНСУНВАРТОР-АВТОМАТ" | 1992 |
|
RU2047023C1 |
| Прибор для определения гибкости обуви | 1981 |
|
SU1000841A1 |
1
Изобретение относится к машиностроению, непосредственно к устройствам для преобразования вращательного Движения в возвратно-поступательное.
Известен винтовой механизм для преобразования вращательного движения в возвратно-поступательное, содержащий винт с правой и левой резьбой , направляющую с ползуном и сухарв, жестко установленный в ползуне и перемещающийся по винту l.
Недостатком ,указанного механизма является невозможность автоматического регулирования длины .реверсивного хода ползуна, так как реверс происходит лишь в местах установки . гаек, которые можно перемещать по винту вручную при остановленном механизме.
Цель изобретения - обеспечение автоматического регулирования длины реверсивного хода ползуна о
Указанная цель достигается тем, что винт выполнен полым, а механизм снабжен стрелками, установленными в местах пересечения резьб с возможностью перемещения к оси винта, и узлом перемещения стрелок вдоль оси винта, расположенным в винте и связанным с ползуном посредством системы управления.
fo Узел перемещения стрелок выполнен в виде штока с упорами, расположенного в винте с возможностью поступательного перемещения и соединенного с ним через подшипник штанги, имеюts щей опорные кольца, установленные с возможностью одновременного вращения с винтом, размещенных внутри каждой п.ары опорных колец, прижимов, взаимодействующих с соответствующими
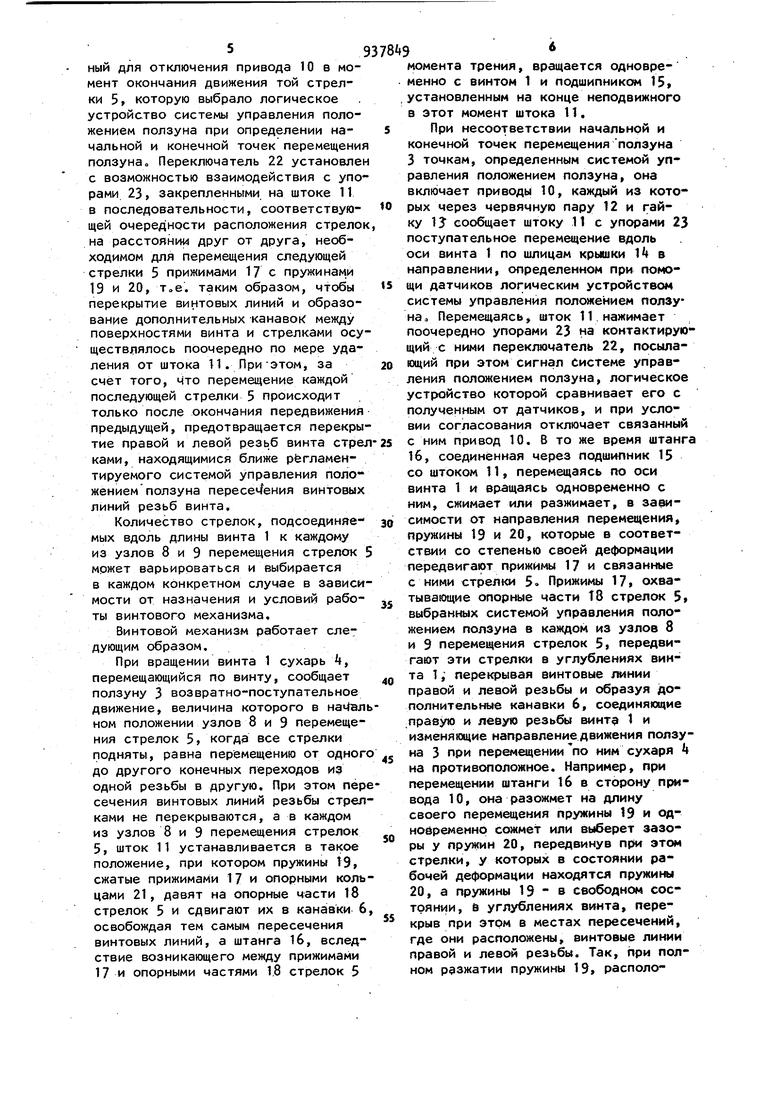
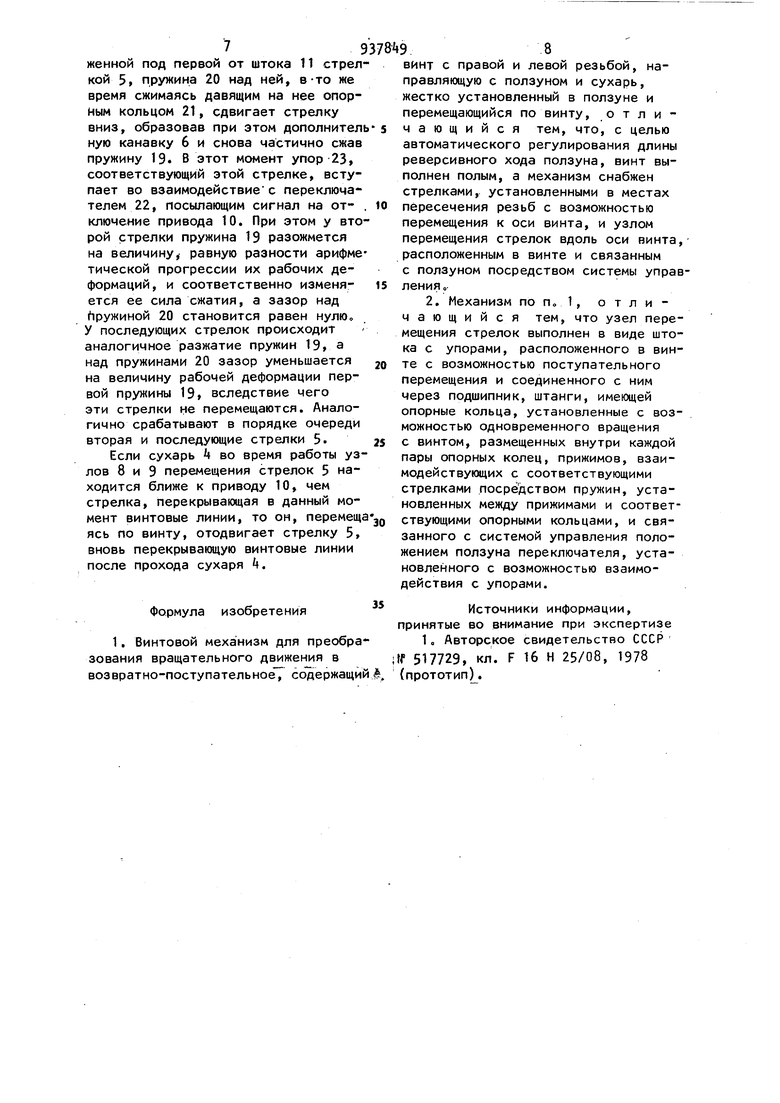
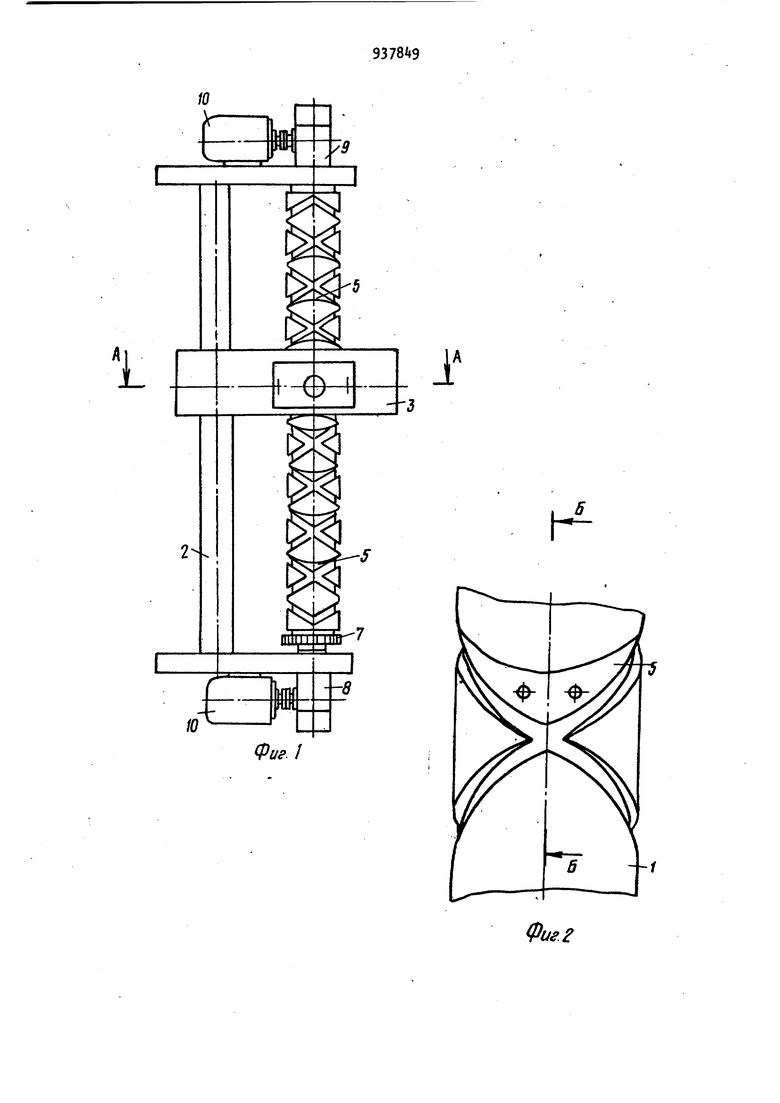
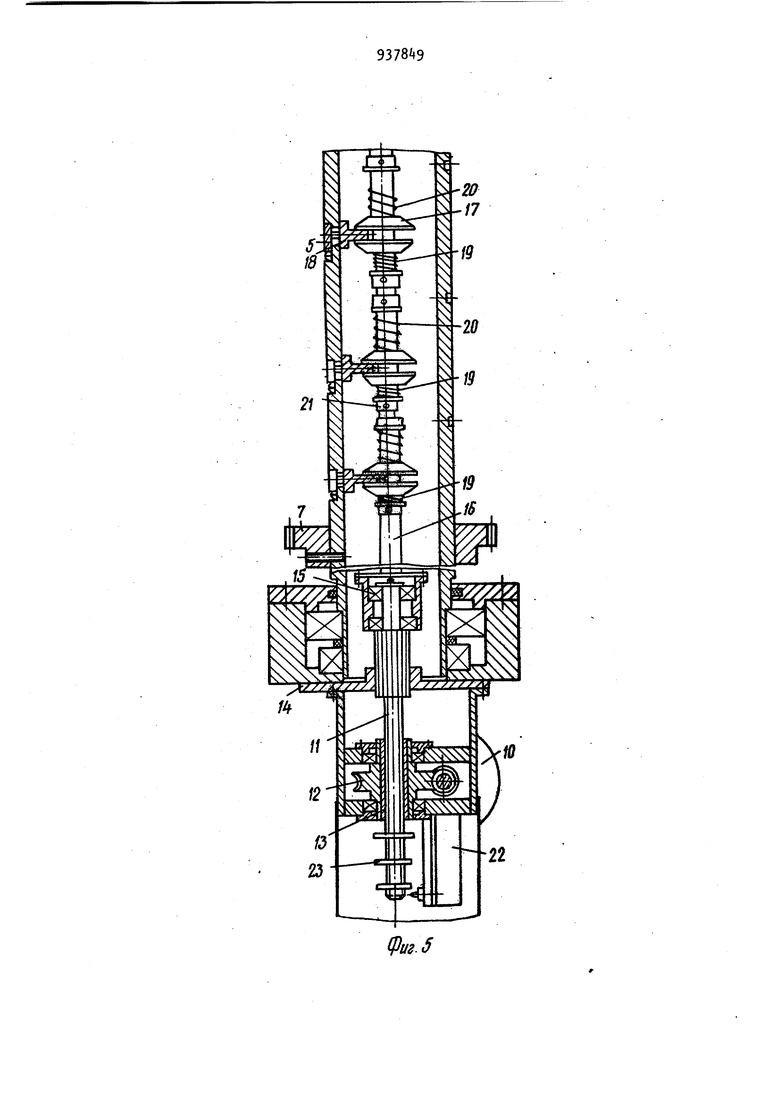
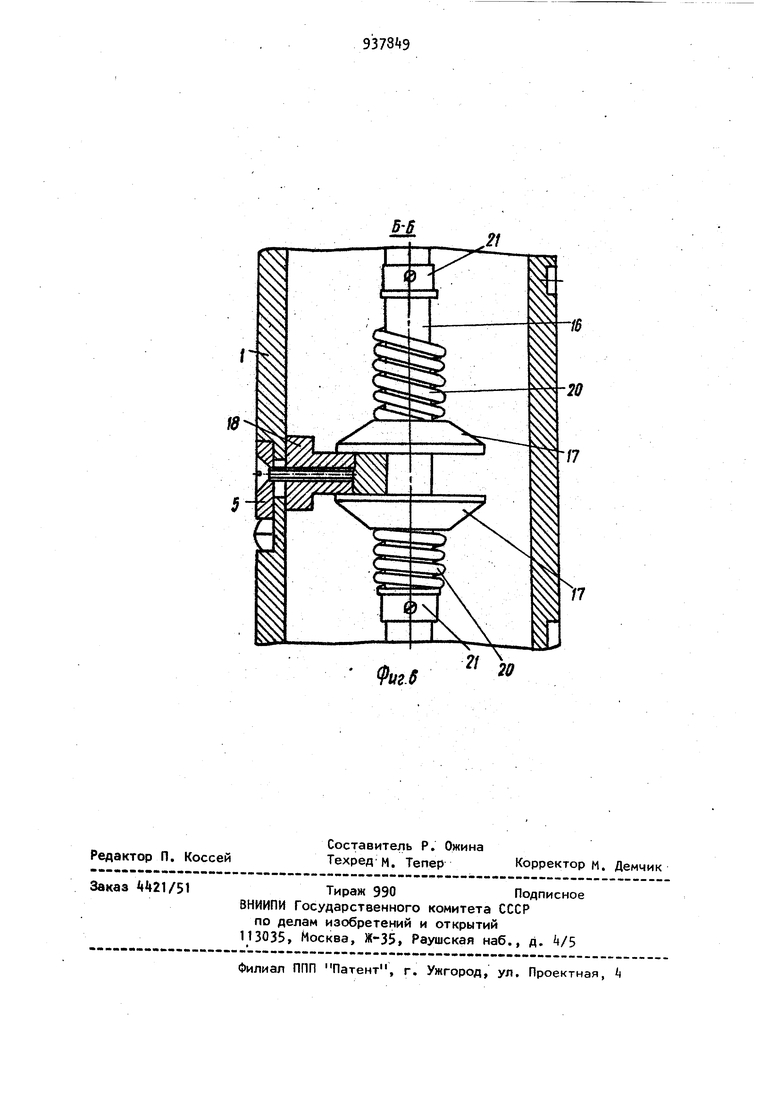
20 стрелками посредством пружин, установленных между прижимами и соответствующими опорными кольцами, и связанного с системой управления положением ползуна переключателя. установленного с возможностью взаимодействия с упорами. На фиг. 1 изображен винтовой механизм, общий вид; на фиг. 2 ви«т со стрелкой; на фиг. 3 винт с передвинутой стрелкой; на фиг разрез А-А на фиг. 1; на фиг. 5 винтовой механизм с устройством, об печивающим перемещение стрелок; на фиг о 6 - разрез Б-Б на фиг. 2. Винтовой механизм содержит винт с правой и левой резьбой, направляющую 2, ползун 3, сухарь . Винт и направляющая 2 проходит через пол зун 3 имеющий отверстие для устано ки подпружиненного сухаря . Кроме того, винтовой механизм содержит стрелки 5, установленные в углублениях винта 1 в местах пересечения винтовых линий резьбы с возможность перекрытия винтовых линий и образования дополнительной канавки 6 между поверхностью винта и стрелки 5, причем ширина и глубина канавки 6 равны ширине и глубине профиля резь бы Канавка 6 соединяет винтовые ли нии правой и левой резьбы винта 1 для изменения направления движения при перемещении по ней сухаря k ползуна 3« При необходимости стрелки 5 могут быть установлены на пере сечении винтовых линий каждого витк Винт приводится во вращение через закрепленное на нем колесо 7 Винто вой механизм снабжен узлами 8 и 9 перемещения стрелок 5 вдоль оси вин та 1, размещенными внутри винта 1, выполненного полым, и системой управления положением ползуна (не показана), включающей в себя логическое устройство с рядом датчиков для определения начальной и конечной точек перемещения ползуна 3 и электрически связанной с приводами 10,например электродвигателями узлов 8 и 9 перемещения стрелок 5. Каждый из узлов перемещения стрелок 5 выполнен в виде штока 11, связанного с приводом 10 через червячную пару 12, в ступице колеса которой зафиксирована гайка 13, образующая с резьбой штока 11 передачу винтгайка, в которой вращательное движе ние гайки 13 преобразуется в поступательное движение штока 11,имеющего возможность поступательного перемещения по шлицам крышки Йо На конце штока 11 смонти рован подшипник 15, г1озволяющий передать поступательное перемещение штока 11, прикрепленной к корпусу подшипника штанги 16, установленной с возможностью продольного перемещения вдоль оси винта 1 и одновременного с ним вращения На штанге 16 размещены свободно передвигающиеся прижимы 17, попарно связанные с опорной частью 18 стрелки 5, с пружинами 19 и 20, обращенными свободными концами к соответствующим им опорным кольцам 21, жестко закрепленным на штанге 16 Под стрелками (т.е.. со стороны пересечения винтовых линий, соответственно над стрелками - со стороны канавки 6) опорные кольца 21 установлены так, чтобы в начальном положении, когда все стрелки подняты, винтовые линии винта 1 в местах пересечения не перекрываются, движение сухаря k осуществляется от одного до другого конечных переходов из одной резьбы в другую, пружин 19, опирающиеся на них, находились в сжатом состоянии. При этом пружины 19, воздействуя через свободно одетые на штангу 16 прижимы 17, давят на стрелки 5, поднимая их в канавках 6 над пересечениями правой и левой резьбы. Для поочередного передвижения стрелок 5 в канавках 6, по мере удаления их от штока 11, рабочие деформации пружин 19 и сопутствующие этим деформациям силы составляют арифметические прогрессии с разностями, равными рабочей деформации и соответствующей ей силе первой по мере удаления от штока 11 пружины 19, а величина рабочей деформации и соответствующая ей сила 20, расположенных над стрелками 5, равны разностям этих арифметических прогрессий. Кроме того, пружины 20 установлены в свободном состоянии и с зазором относительно опорных колец 21, величина которого над каждой из пружин по мере удаления их от штока 11 выражается той же арифметической прогрессией с разностью, равной рабочей деформации первой пружины 19, причем зазор над пружиной 20 первой по мере удаления от штока 11 стрелки 5 равен нулю. Узлы 8 и 9 перемещения стрелок 5 содержат также переключатель 22, включенный в цепь системы управления положением ползуна и предназначенный для отключения привода 10 в момент окончания движения той стрелки 5, которую выбрало логическое устройство системы управления положением ползуна при определении начальной и конечной точек перемещени ползуна Переключатель 22 установле с возможностью взаимодействия с упо рами 23, закрепленными на штоке 11 в последовательности, соответствующей очередности расположения стрело на расстоянии друг от друга, необходимом для перемещения следующей стрелки 5 прижимами 17 с пружинами 19 и 20, Тое. таким образом, чтобы перекрытие винтовых линий и образование дополнительных канавоК между поверхностями винта и стрелками осу ществлялось поочередно по мере удаления от штока П. Приэтом, за счет того, что перемещение каждой последующей стрелки 5 происходит только после окончания передвижения предыдущей, предотвращается перекры тие правой и левой резьб винта стре ками, находящимися ближе регламентируемого системой управления положением ползуна переселения винтовых линий резьб винта, Количество стрелок, подсоединяе мых вдоль длины винта 1 к каждому из узлов 8 и Э перемещения стрелок может варьироваться и выбирается в каждом конкретном случае в зависи мости от назначения и условий работы винтового механизма. Винтовой механизм работает следующим образом. При вращении винта 1 сухарь 4, перемещающийся по винту, сообщает ползуну 3 возвратно-поступательное движение, величина которого в ном положении узлов 8 и 9 перемещения стрелок 5, когда все стрелки подняты, равна перемещению от одног до другого конечных переходов из одной резьбы в другую. При этом пер сечения винтовых линий резьбы стрел ками не перекрываются, а в каждом из узлов 8 и 9 перемещения стрелок 5, шток П устанавливается в такое положение, при котором пружины 19, сжатые прижимами 17 и опорными коль цами 21, давят на опорные части 18 стрелок 5 и сдвигают их в канавки 6 освобождая тем самым пересечения винтовых линий, а штанга 16, вследствие возникающего между прижимами 17 и опорными частями 18 стрелок 5 момента трения, вращается одновременно с винтом 1 и подшипником 15, установленным на конце неподвижного в Этот момент штока 11. При несоответствии начальной и конечной точек перемещения ползуна 3 точкам, определенным системой управления положением ползуна, она включает приводы 10, каждый из которых через червячную пару 12 и гайку 13 сообщает штоку 11с упорами 23 поступательное перемещение вдоль оси винта 1 по шлицам крышки На направлении, определенном при помощи датчиков логическим устройством системы управления положением ползуна. Перемещаясь, шток 11,нажимает поочередно упорами 23 на контактирующий с ними переключатель 22, посылающий при этом сигнал Системе управления положением ползуна, логическое устройство которой сравнивает его с полученным от датчиков, и при условии согласования отключает связанный с ним привод 10. В то же время штанга 16, соединённая через подшипник 15 со штоком 11, перемещаясь по оси винта 1 и вращаясь одновременно с ним, сжимает или разжимает, в зависимости от направления перемещения, пружины 19 и 20, которые в соответствии со степенью своей деформации передвигают прижимы 17 и связанные с ними стрелю1 5. Прижимы 17, охватывающие опорные части 18 стрелок 5, выбранных, системой управления положением ползуна в каждом из узлов 8 и 9 перемещения стрелок 5, передвигают эти стрелки в углублениях винта 1; перекрывая винтовые линии правой и левой резьбы и образуя дополнительные канавки 6, соединяющие правую и левую резьбы винт 1 и изменяющие направление движения ползуна 3 при перемещении по ним сухаря k на противоположное. Например, при перемещении штанги 16 в сторону привода 10, она разожмет на длину своего перемещения пружины 19 и одновременно сожмет или выберет зазоры у пружин 20, передвинув при этом стрелки, у которых в состоянии рабочей деформации находятся пружины 20, а пружины 19 - в свободном состоянии, и углублениях винта, перекрыв при этом в местах пересечений, где они расположены, винтовые линии правой и левой резьбы. Так, при полном разжатии пружины 19, расположенной под первой от штока 11 стрел кой 5, пружина 20 над ней, в-то же время сжимаясь давящим на нее опорным кольцом 21, сдвигает стрелку вниз, образовав при этом дополнител ную канавку 6 и снова частично сжав пружину 19. В этот момент упор 23, соответствующий этой стрелке, вступает во взаимодействиес переключателем 22, посылающим сигнал на отключеиие привода 10. При этом у вто рой стрелки пружина 19 разожмется на величину равную разности арифме тической прогрессии их рабочих деформаций, и соответственно изменяется ее сила сжатия, а зазор над пружиной 20 становится равен нулю, У последующих стрелок происходит аналогичное разжатие пружин 19, а над пружинами 20 зазор уменьшается на величину рабочей деформации первой пружины 19, вследствие чего эти стрелки не перемещаются. Аналогично срабатывают в порядке очереди вторая и последующие стрелки 5. Если сухарь U во время работы уз лов 8 и 9 перемещения стрелок 5 находится ближе к приводу 10, чем стрелка, перекрывающая в данный момент винтовые линии, то он, перемещ ясь по винту, отодвигает стрелку 5, вновь перекрывающую винтовые линии после прохода сухаря Ц, Формула изобретения 1. Винтовой механизм для преобра зования вращательного движения в возвратно-поступательное, содержащи винт с правой и левой резьбой, направляющую с ползуном и сухарь, жестко установленный в ползуне и перемещающийся по винту, отличающийся тем, что, с целью автоматического регулирования длины реверсивного хода ползуна, винт выполнен полым, а механизм снабжен стрелками, установленными в местах пересечения резьб с возможностью перемещения к оси винта, и узлом перемещения стрелок вдоль оси винта, расположенным в винте и связанным с ползуном посредством системы управления о 2. Механизм поп,1, отличающийся тем, что узел перемещения стрелок выполнен в виде штока с упорами, расположенного в винте с возможностью поступательного перемещения и соединенного с ним через подшипник, штанги, имеющей опорные кольца, установленные с возможностью одновременного вращения с винтом, размещенных внутри каждой пары опорных колец, прижимов, взаимодействукмцих с соответствующими стрелками посрёйством пружин, установленных между прижимами и соответствующими опорными кольцами, и связанного с системой управления положением ползуна переключателя, установленного с возможностью взаимодействия с упорами. Источники информации, ринятые во внимание при экспертизе 1 о Авторское свидетельство СССР 517729, кл. F 16 Н 25/08, 1973 (прототип).
L
Фие. /
L-JL
h
z
fue.3
(Риг
