магистрали перед регулируемым дросселем.
Кроме того, дебалансы установлен попарно, при этом центры их распо.ложены в одной плоскости, а вал одного дебаланса выполнен полым, в ко .тором соосно размещен вал другого дебаланса.
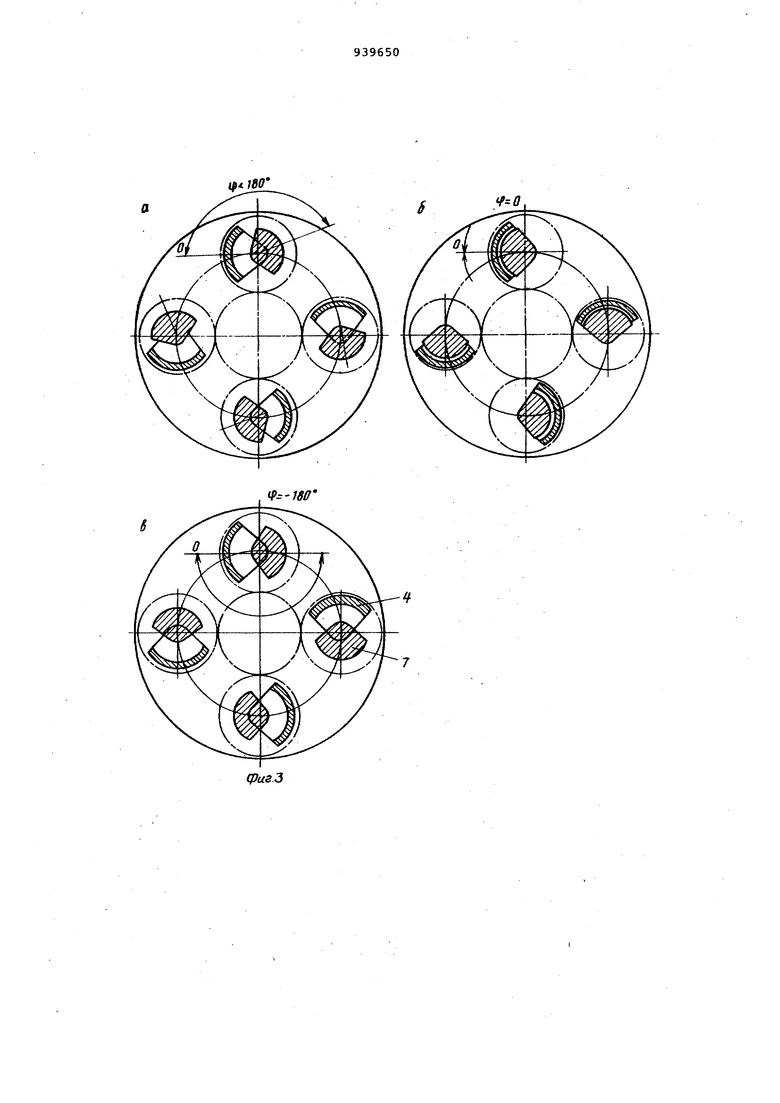
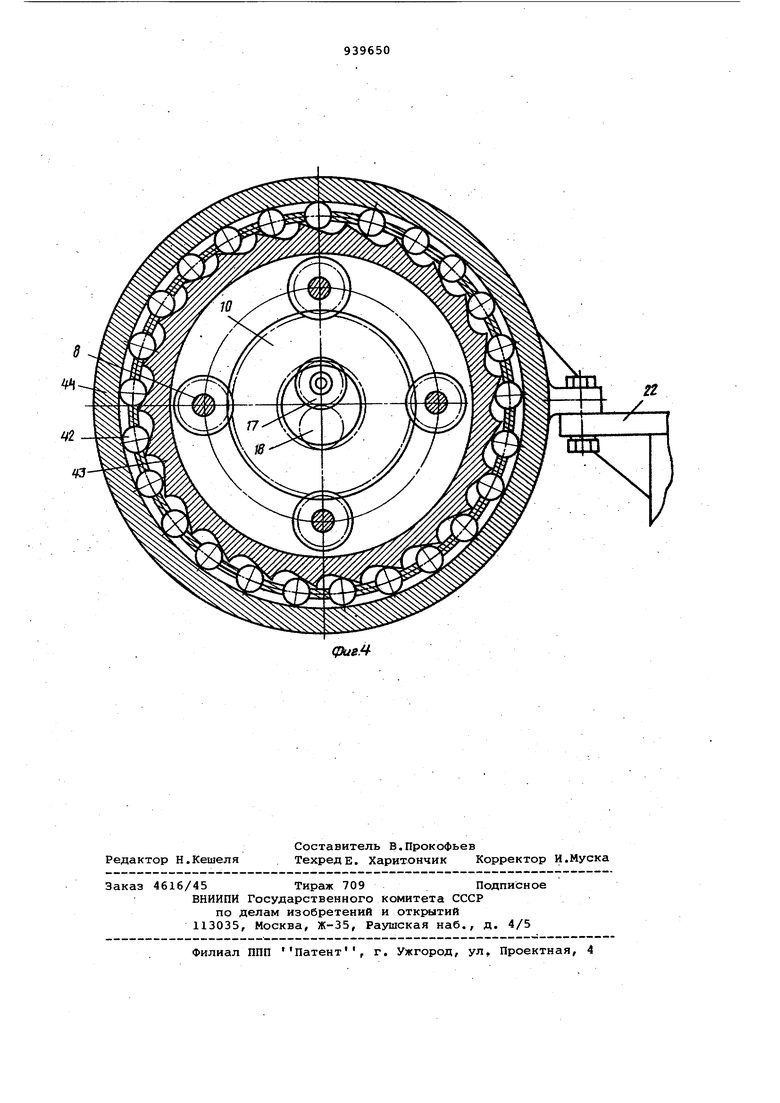
На фиг.1 схематично изображен импульсный привод роторного экскаватора, общий вид; на фиг,2 - вид А на фиг.1 {гидравлическая схема); на фиг.З - фазовая ориентация дебалансов при крайнем и среднем положениях штока гидроцилиндра; на фиг,4 - механизм свободного хода.
Инерционный импульсный привод состоит Из корпуса 1, связанного с исполнительным органом 2, в корпусе на полых осях 3 жестко закреплены дебалансы 4 и шестерни 5. В полые оси 3 встроены свободно вращающиеся оси 6, на которых жестко посажены дебалансы 7 и шестерни 8. Шестерни 5 и 8 находятся в постоянном зацеплении с раздаточными шестернями 9 и 10, закрепленными на эпициклах 11 и 12.
На эпицикле 12.закреплено коническое колесо .13, которое находится в зацеплении с конической шестерней 14, приводимой во вращение электродвигателем 15. Эпициклы 11 и 16, 16 и 12 связаны между собой соответственно шестернями 17-20. Водило 21, на котором находятся шестерни 17 и 18р застопорено на металлоконструкцию 22f а .водило 23 с расположенными на нем шестернями 19 и 20 через рычаг 24 шарнирно соединено с гидроцилиндром 25, Насос 26 через зубчатую передачу 27 соединен с исполнительным органом 2, На корпусе 1 закреплена обойма механизма 28 свобдного хода, а его вторая обойма застопорена.
Гидравлическая схема состоит из гидроцилиндра 25, штоковая полость которого через регулируемый дроссель 29 замкнута на пневмогидравлический аккумулятор 30, поршневая полость гидроцилиндра 25 соединена с напорной магистралью 31 насоса 26 К напорной магистрали 31 присоединены через регулируемый дроссель 32 пневмогидравлический аккумулятор 33 через обратный клапан 34 напорная магистраль 35 вспомогательного насоса 36 с автономным электродвигателем 37, имекщая регулируемый пре.дохранительный клапан 38,
Поршневая полость гидроцилиндра 25 снабжена двухпозиционным золотником 39, установленным на сливной магистрали 40 перед регулируемым дроссе|Лем 41. МСХ состоит из роликов 42, внутренней обоймы 43 и наружной обоймы 44.
Привод работает следующим образом.
Шток гидроцилиндра 25 (фиг.2) под действием пневмогидравлическрго аккумулятора 30 втянут, что соответствуёт углу рассогласования дебалан. сов 4 -ISO ,(Фиг.Зв) , т.е. дебалансы 4 и 7 полностью уравновешивают друг друга.
При включении вспомогательного наcoca 36 рабочая жидкость через обратный клапан 34 подается в поршневую полость гидродилиндра 25, давление в которой устанавливается регулируемым дросселем 41, расположенным 5 в сливной магистрали 40, подключенной к поршневой полости. Давление в поршневой полости начинает расти, ;шток выдвигается и через рычаг 24 по ворачивает водило 23 и шестерни 19 и
20передают вращение на эпицикл 16, который, вращая шестерни 17 и 18 не-, подвижного водила 21, поворачивает эпицикл 11 в раздаточную шестерню 10 на угол 2 d, а она в свою очередь через шестерню 8 поворачивает дебаланс 7 на угол рассогласования
4 . В начале хода шток гидроцилиндра 25 проходит точку, которой соответствует такое положение рыЧага 24, при котором угол рассогласования дебалансов 4, (фиг.36) , далее при выдвижении штока угол Ч увеличивается и приближается к 180 (фиг.За). После этого производится запуск электродвигателя 15, вращающего через коническую шестерню 14 и коническое колесо 15 эпицикл 12 и раздаточную шестерню 9. Одновременно вращение с эпицикла 12 передается на шестерни 19 и 20, расположенные на водиле 23, и эпицикл 16, который через шестерни 17 и 18 водила
21вращает эпицикл 11 и раздаточную шестерню 10. Раздаточные шестерни 10 и 9 через шестерни 5 и 8 синхронно в
5 одну сторону вращают дебалансы 4 и 7 с частотой вращения 3000-4000 об/мин. Исполнительный орган 2 начинает вращаться и через передачу 27 вращает вал насоса 26, нагнетающего рабочую
0 .жидкость в поршневую полость гидроцилиндра 25, в этот момент вспомогательный насос 36 отключается.
Возрастание момента сопротивления j- приводит к снижению оборотов испол- нительного органа 2 и связанного с . ним через передачу 27 насоса 26, что вызывает падение давления в поршневой полости гидроцилиндра 25, шток под действием давления пневмогидрав лического аккумулятора 30 начинает опускаться и через рычаг 24 поворачивает водило 23, угол рассогласования дебалансов Ч уменьшается, а вращающий момент и амплитуда колебаний на 5 исполнительном органе увеличивается |и частота его вращения восстанавлйв ется. Если шток гидроцилиндра 25 под действием момента сопротивления на исполнительном органе 2 занимает по ложение, соответствующее углу рассо гласования дебалансов f в интервале от О до 180, происходит автоматиче кая стабилизация скорости исполнительного органа. При моменте сопрот ления, превышающем момент, развивае мый приводом, шток проходит точку, соответствующую углу Ч 0 (фиг.Зб), при этом частота вращения роторного насоса уменьшается, давление в порш невой полости падает, шток гидроцилиндра 25 опускается и дебалансы 4 и 7 расходятся на угол рассогласова ния -180 и привод начинает рабо тать в режиме холостого хода. Для вывода привода на.рабочий, режим вкл чается вспомогательный насос 36 и шток выходит в крайнее положение, после чего насос 36 отключается. Торможение производится следующим образом. Переключается двухпозиционный золотник 39 и соединяет поршневую полость гидроцилиндра 25 со сливной магистралью 40, минуя дроссель 41, давление в поршневой полости падает, шток полностью втягивается и через рычаг 24 поворачивает водило 23, дебалансы 4 и 7 расходятся на угол рассогласования -180 и уравновешивают друг друга, вращающий момент привода равен нулю, одно .временно включается тормоз исполнительного органа. Применение предлагаемого привода исполнительного органа роторного экскаватора средней мощности поз волит по сравнению с известными .сни зить неравномерность входной нагруз ки на исполнительный орган и эффективно .стабилизировать его в пространстве забоя, что приведет к значи тельному уменьшению энергоемкости экскавации и, как следствие, к увеличению производительности, особенно для хрупких пород (уголь, мел и т.п.) , При вращении обоймы 43 МСХ по часовой стрелке происходит заклинивание механизма. При жестком крепле нии обоймы 42 отрицательный импульс Заклинивая МСХ, поглощается металлоконструкцией стрелы ротора. Положительный импульс дебалансов, направленный в противоположную сторону, расклинивает механизм и обойма 43 поворачивается и передает вращение рабочему органу экскаватора. : Формула изобретения 1. Импульсный привод роторного экскаватора, включающий двигатель, раздаточные шестерни, корпус с дебалансами на валах и муфту свободного хода, отличающийся тем, что, с целью повышения производительности экскаватора путем автоматизации стабилизации угловой скорости рабочего органа, он снабжен механиз-. мом управления дебалансами, содержащим насос, ваЛ которого связан с рабочим органом роторного экскаватора, с напорной и сливной магистралями, гидроаккумуляторы, регулируемый дроссель и двухпоточную планетарнуто передачу, одно водило которой застопорено, а другое имеет гидроцилиндр и соединенный с его штоком рычаг, при этом штоковая полость гидроцилиндра соединена с гидроаккумулятором, а поршневая - с напорной и через регулируемый дроссель - со сливной магистралями гидронасоса. 2.Привод по П.1, о т л и ч а ющ и и с я тем, что гидроцилиндр имеет золотник, установленный на сливной магистрали перед регулируемым дросселем. 3.Привод по ПП.1 и,2, о т л и чающийся тем, что дебалансы установлены попарно, при этом центры их масс расположены в одной плоскости, а вал одного дебаланса каждой пары выполнен полым, в котором соосно размещен вал другого дебаланса. Источники информации, принятые во внимание при экспертизе 1.Леонов А.И. Инерционные автоматические трансформаторы вращающего момента. М., Машиностроение, 1978, с. 28-31. 2.Студниц Е.Я. Методика расчета центробежного импульсного привода. Институт горного дела им. А.А.Скочинского. 1976, с. 17-19 (прототип).
26
1#« 180
f-m

| название | год | авторы | номер документа |
|---|---|---|---|
| Импульсный привод роторного экскаватора | 1987 |
|
SU1490228A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО КАНТОВАТЕЛЯ С ПОВОРОТНОЙ ПОДЪЕМНОЙ ПЛАТФОРМОЙ | 2008 |
|
RU2356829C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1997 |
|
RU2131394C1 |
| Устройство для вибровращательного бурения | 1985 |
|
SU1298370A1 |
| ГИДРОСИСТЕМА МОБИЛЬНОЙ МАШИНЫ | 2010 |
|
RU2435909C1 |
| УСТРОЙСТВО ДЛЯ РЕКУПЕРАЦИИ ЭНЕРГИИ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2193977C2 |
| АКСИАЛЬНО-ПОРШНЕВОЙ НАСОС И ГИДРАВЛИЧЕСКАЯ ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА С АКСИАЛЬНО-ПОРШНЕВЫМ НАСОСОМ | 2000 |
|
RU2172428C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ЛЮКОВОГО ЗАКРЫТИЯ | 2008 |
|
RU2364542C1 |
| Гидравлический роторный экскаватор | 1985 |
|
SU1305256A1 |
| ГИДРАВЛИЧЕСКИЙ ВИБРОВОЗБУДИТЕЛЬ | 2019 |
|
RU2740420C2 |