-14
хода состоит из обоймы 21, закрепленной, например на роторной стрелке, роликов 22 и внутренней обоймы 23, выполненной в корпусе 1 , 1 естерня 19 находится в зацеплении с зубчатой рейкой 24, соединенной с поршнями 25 и 26, расположенными в полостях 27 и 28 ГД 20. С полостью 27 через гидрораспределитель 29 соединен пневмогидроаккумулятор 30, а его пневмополость через обратный клапан 31 соединена с пневмомагистралью компрессора. С полостью 28 через гидрораспределитель 29 и регулируемый .дроссель 32, расположенные последовательно, соединен пневмогидроаккумулятор 33. При работе при- вода крутящий момент от двигателя 15 передается к Д 7 и 4, вращая их в противоположном направлении Реактивный крутящий момент через водило 18 воспринимается ГД 20, вы
0
тесняя жидкость в аккумулятор 33. Перемещение рейки 24 вызывает пово-и рот Д 4 относительно Д 7, создавая знакопеременный крутягшй момент, который посредством механизма свободного хода преобразуется во вращающий момент ИО 2, При замедлении его вращения угол между Д 4 и 7 уменьшается. Импульс центробежного момента возрастает и частота вращения ИО 2 восстанавливается. При моменте сопротивления на ИО 2 больше, чем развиваемый приводом, срабатывает 5 клапан 34, давление в аккумуляторе 33 падает, и рейка 24 поворачивает Д 4, переводя привод в режим холостого хода. Для торможения ИО 2 пневмополость аккумулятора 33 соединяется с атмосферой, поворачиваются Д 4, уравновешивая Д 7, и вращаюР01й момент привода равен нулю. 1 з,п. ф-лы, 5 ил.
0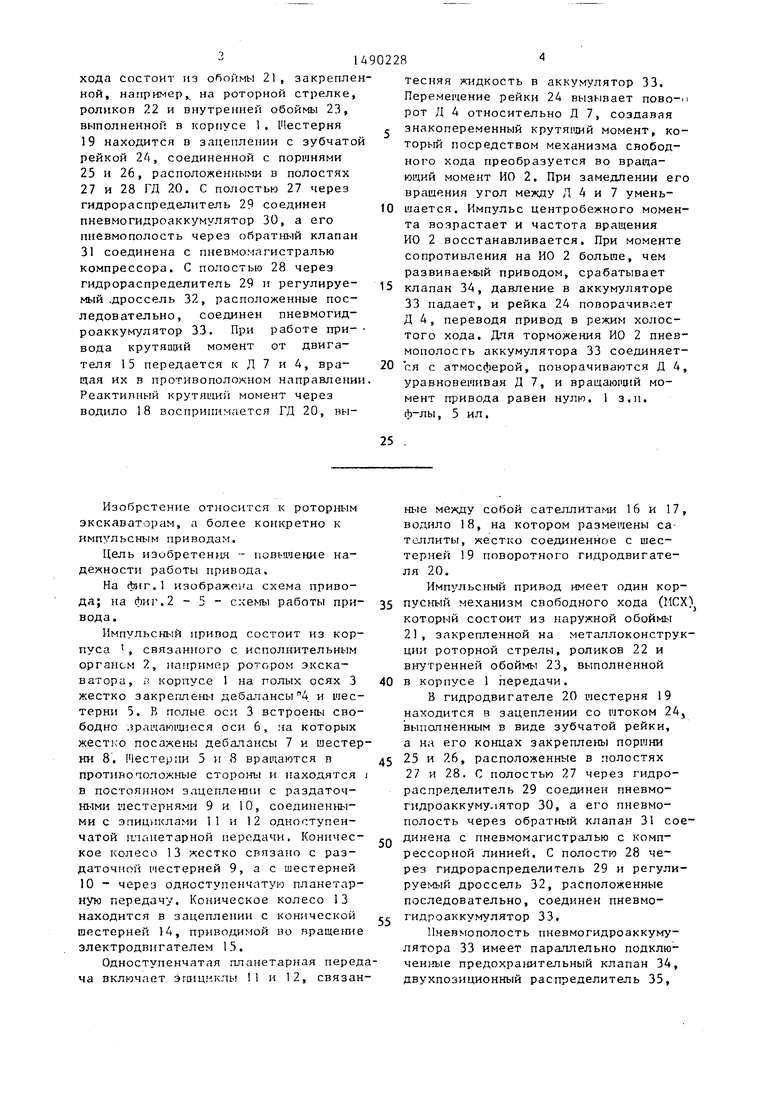
| название | год | авторы | номер документа |
|---|---|---|---|
| Импульсный привод роторного экскаватора | 1980 |
|
SU939650A1 |
| МАШИНА | 2009 |
|
RU2401762C1 |
| Траншейный экскаватор | 1979 |
|
SU891859A1 |
| Система управления трактором | 1988 |
|
SU1601008A1 |
| РЕВЕРСИВНАЯ МУФТА СЦЕПЛЕНИЯ С ПНЕВМОГИДРАВЛИЧЕСКИМ УПРУГИМ ЭЛЕМЕНТОМ | 2009 |
|
RU2422695C1 |
| Вращатель бурового станка | 1983 |
|
SU1835455A1 |
| Механизм отбора мощности транспортного средства | 1988 |
|
SU1544600A1 |
| УСТРОЙСТВО ДЛЯ СНИЖЕНИЯ ЖЕСТКОСТИ ТРАНСМИССИИ МАШИННО-ТРАКТОРНОГО АГРЕГАТА | 2008 |
|
RU2398147C1 |
| Привод механизма поворота верхнего строения экскаватора | 1982 |
|
SU1193241A1 |
| Вращатель бурового станка | 1983 |
|
SU1657581A1 |
Изобретение относится к импульсным приводам. Цель изобретения - повышение надежности работы привода. Привод включает электродвигатель 15, связанный с исполнительным органом (ИО) 2. В корпусе на полых осях 3 закреплены дебалансы (Д) 4 и шестерни 5. В осях 3 расположены оси 6 с Д 7 и шестернями 8. Шестерни 5 и 8 находятся в зацеплении с раздаточными шестернями 9 и 10, соединенными с эпициклами 11 и 12 одноступенчатой планетарной передачи. Коническое колесо 13 жестко соединено с шестерней 9, а с шестерней 10 через эпициклы 11 и 12 и сателлиты 16 и 17 одноступенчатой планетарной передачи, водило 18 которой жестко соединено с шестерней 19 поворотного гидродвигателя (ГД) 20. Механизм свободного хода состоит из обоймы 21, закрепленной, например, на роторной стреле, роликов 22 и внутренней обоймы 23, выполненной в корпусе 1. Шестерня 19 находится в зацеплении с зубчатой рейкой 24, соединенной с поршнями 25 и 26, расположенными в полостях 27 и 28 ГД 20. С полостью 27 через гидрораспределитель 29 соединен пневмогидроаккумулятор 30, а его пневмополость через обратный клапан 31 соединена с пневмомагистралью компрессора. С полостью 28 через гидрораспределитель 29 и регулируемый дроссель 32, расположенные последовательно, соединен пневмогидроаккумулятор 33. При работе привода крутящий момент от двигателя 15 передается к Д 7 и 4, вращая их в противоположном направлении. Реактивный крутящий момент через водило 18 воспринимается ГД 20, вытесняя жидкость в аккумулятор 33. Перемещение рейки 24 вызывает поворот Д 4 относительно Д 7, создавая знакопеременный крутящий момент, который посредством механизма свободного хода преобразуется во вращающий момент ИО 2. При замедлении его вращения угол между Д 4 и 7 уменьшается. Импульс центробежного момента возрастает и частота вращения ИО 2 восстанавливается. При моменте сопротивления на ИО 2 больше, чем развиваемый приводом, срабатывает клапан 34, давление в аккумуляторе 33 падает, и рейка 24 поворачивает Д 4, переводя привод в режим холостого хода. Для торможения ИО 2 пневмополость аккумулятора 33 соединяется с атмосферой, поворачиваются Д 4, уравновешивая Д 7, и вращающий момент привода равен нулю. 1 з.п. ф-лы, 5 ил.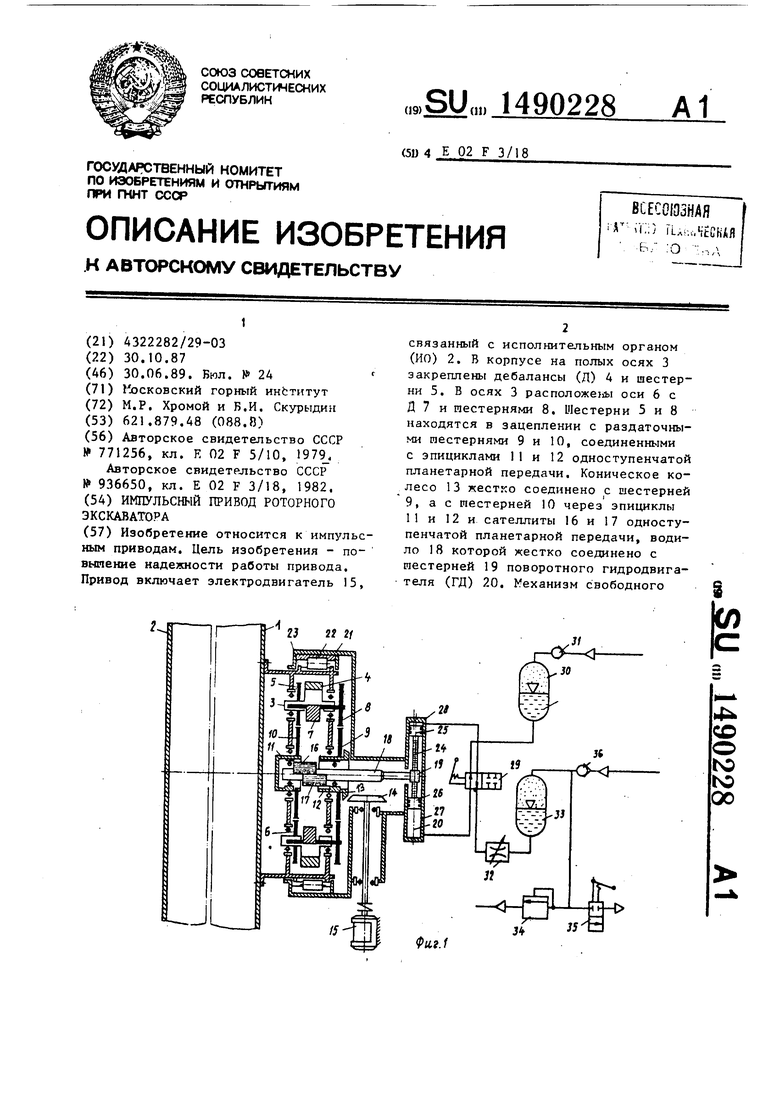
Изобретение относится к роторным экскаваторам, а более конкретно к импульсным приводам.
Цель изобретения - повьаиение надежности работы привода.
На фиг.1 изображена схема привода; на фиг.2 - 5 - схемы работы привода.
Импульсный привод состоит из корпуса 1 , связанного с исполнительным органом 2, например ротором экскаватора, в корпусе 1 на полых осях 3 жестко закреплены дебалансы 4. и шестерни 5. В полые оси 3 встроены свободно лращаювдю.ся оси 6, па которых жестко посажены дебалансы 7 и шестерни 8. Честер:1и 5 и 8 вращаются п противоположные стороны и находятся в постоянном зацеплении с раздаточными шестернями 9 и 10, соединенными с эпициклами 11 и 12 одноступенчатой апанетарной передачи. Коническое колесо 13 жестко связано с раздаточной шестерней 9, а с шестерней 10 - через одноступенчатую планетарную передачу. Коническое колесо 13 находится в зацеплении с конической шестерней 14, приводимой во вращение электродвигателем 15.
Одноступенчатая планетарная передча включает ЭГЕИЦИКЛЫ П и 12, связан5
0
5
0
5
ныв между собой сателлитами 16 и 17, водило 18, на котором размещены сателлиты, жестко соединенное с шестерней 19 поворотного гидродвигателя 20.
Импульсный привод имеет один корпусный механизм свободного хода (МСХ) который состоит из аружной обоймы 21, закрепленной на металлоконструкции роторной стрелы, роликов 22 и внутренней обоймы 23, выполненной в корпусе 1 передачи.
В гидродвигателе 20 шестерня 19 находится в зацеплении со штоком 24, выполненным в виде зубчатой рейки, а на его концах закреплены поршни 25 и 26, расположенные в полостях 27 и 28. С полостью 27 через гидрораспределитель 29 соединен пневмогидроаккумулятор 30, а его пневмополость через обратный клапан 31 соединена с пневмомагистралью с компрессорной линией. С полостю 28 через гидрораспределитель 29 и регулируемый дроссель 32, расположенные последовательно, соединен пневмогидроаккумулятор 33.
Пневмополость пневмогидроаккумулятора 33 имеет параллельно подключенные предохранительный клапан 34, двухпозиционный распределитель 35,
связанные с атмосферой, и обратный клапан 36, соединенный с компрессорной линией.
Привод работает следующим обра эом.
При подготовке привода к работе производят зарядку пневмополостей аккумуляторов 30 и 33, причем зарядное давление в пневмогидроаккумуля- торе 33 более высокое и его величина зависит от реакции в зацеплении 17, 12 и 11, 16, воспринимаемой гидродвигателем 20 через шестерню 19,
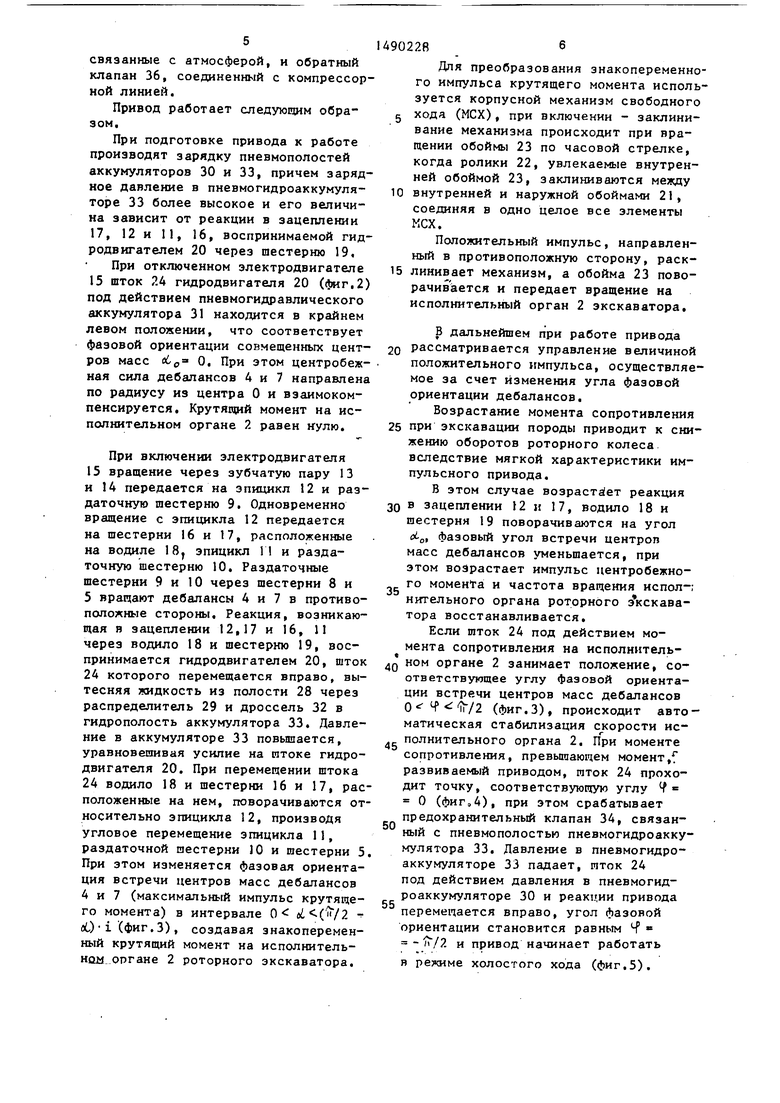
При отключенном электродвигателе 15 шток Л гидродвигателя 20 (фиг,2) под действием пневмогидравлического аккумулятора 31 находится в крайнем левом положении, что соответствует фазовой ориентации совмещенных центров масс о6(, О, При этом центробежная сила дебалансов А и 7 направлена по радиусу из центра О и взаимоком- пенсируется. Крутящий момент на исполнительном органе 2 равен кулю.
При включении электродвигателя 15 вращение через зубчатую пару 13 и 14 передается на эпицикл 12 и раздаточную шестерню 9. Одновременно вращение с эпицикла 12 передается на шестерни 16 и 17, расположенные на водиле 18 эпицикл 11 и раздаточную шестерню 10, Раздаточные шестерни 9 и 10 через шестерни 8 и 5 вращают дебалансы 4 и 7 в противоположные стороны. Реакция, возникающая я зацеплении 12,17 и 16, П через водило 18 и шестерню 19, воспринимается гидродвигателем 20, OJTOK 24 которого перемещается вправо, вытесняя жидкость из полости 28 через распределитель 29 и дроссель 32 в гидрополость аккумулятора 33, Давление в аккумуляторе 33 повьшается, уравновешивая усилие на итоке гидродвигателя 20. При перемещении щтока 24 водило 18 и шестерни 16 и 17, расположенные на нем, поворачиваются относительно эпицикла 12, производя угловое перемещение эпицикла 11, раздаточной шестерни 10 и шестерни 5 При этом изменяется фазовая ориентация встречи центров масс дебалансов 4 и 7 (максимальнь й импульс крутящего момента) в интервале О i)i(/2 - оС) i (фиг.З), создавая знакопеременный крутящий момент на исполнитель- ном..органе 2 роторного экскаватора.
9022В6
Для преобразования знакопеременного импульса крутящего момента используется корпусной механизм свободного
5 хода (мех), при включении - заклинивание механизма происходит при вращении обоймы 23 по часовой стрелке, когда ролики 22, увлекаемые внутренней обоймой 23, заклиниваются между
10 внутренней и наружной обоймами 21, соединяя в одно целое все элементы
мех.
Положительный импульс, направленный в противоположную сторону, раск- 15 линивает механизм, а обойма 23 поворачивается и передает вращение на исполнительный орган 2 экскаватора.
0
5
0
5
0
5
0
5
В дальнейшем при работе привода рассматривается управление величиной положительного импульса, осуществляемое эа счет изменения угла фазовой ориентации дебалансов.
Возрастание момента сопротивления при экскавации породы приводит к снижению оборотов роторного колеса вследствие мягкой характеристики импульсного привода,
В этом случае возраста(ет реакция в зацеплении 12 и 17, водило 18 и шестерня 19 поворачиваются на угол oi-f,, фазовый угол встречи центров масс дебалансов уменьшается, при этом возрастает импульс центробежного момента и частота вращения испол-; нительного органа роторного э кскава- тора восстанавливается.
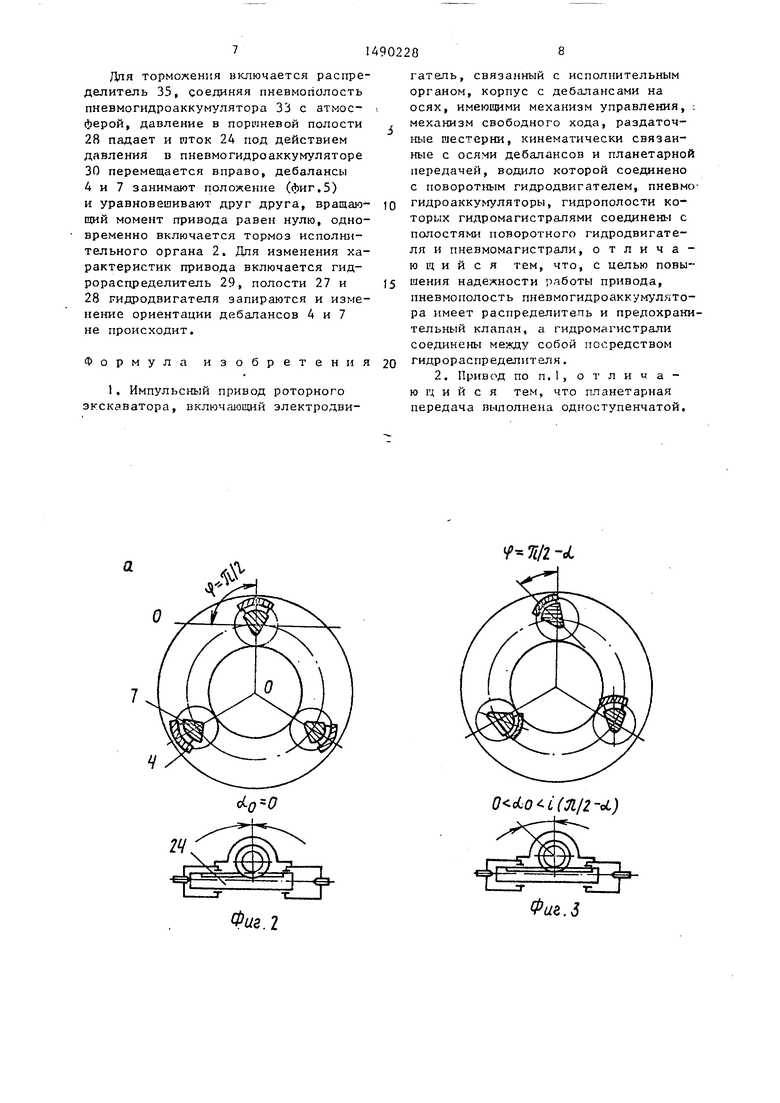
Если шток 24 под действием момента сопротивления на исполнительном органе 2 занимает положение, соответствующее углу фазовой ориентации встречи центров масс дебалансов О с- Ч /2 (фиг.З), происходит автоматическая стабилизация скорости исполнительного органа 2. При моменте сопротивления, превьапающем момент,f развиваемый приводом, шток 24 проходит точку, соответствующую углу f О (фиго 4), при этом срабатывает предохранительный клапан 34, связанный с пневмополостью пневмогидроакку- мулятора 33. Давление в пневмогидро- аккумуляторе 33 падает, шток 24 под действием давления в пневмогид- роаккумуляторе 30 и реакции привода перемещается вправо, угол фазовой ориентации становится равньм Ч - и привод начинает работать
в режиме холостого хода (фиг.З).
Для торможения включается распределитель 35, соединяя пневмополость пневмогидроаккумулятора 33 с атмос- ферой, давление в поршневой полости 28 падает и шток 24 под действием давления в пневмогидроаккумуляторе 30 перемещается вправо, дебалансы 4 и 7 занимают положение (фиг.5) и уравновешивают друг друга, вращаю- щий момент привода равен нулю, одновременно включается тормоз исполнительного органа 2. Дпя изменения характеристик привода включается гидрораспределитель 29, полости 27 и 28 ридродвигателя запираются и изменение ориентации дебапансов 4 и 7 не происходит.
Формула изобретения
24
1лг.2
органом, корпус с дебалансами на осях, имеющими механизм управления, механизм свободного хода, раздаточные DjecTepKH, кинематически связанные с осями дебалансов и планетарной передачей, водило которой соединено с поворотным гидродвигателем, пневмо- гидроаккумуляторы, гидрополости которых гидромагистрапями соединены с полостями поворотного гидродвигателя и пневмомагистрали, отличающийся тем, что, с целью повы- щения надежности работы привода, пневмополость пневмогидроаккумулкто- ра имеет распределитель и предохранительный клапан, а гидромагистрали соединены между собой посредством гидрораспределителя,
(ni2-)
TS
Фа.З
« LHll
Фиг. /
f -77/2
Фид.5
| Крутильно-колебательный привод активного щелереза | 1979 |
|
SU771256A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 936650, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
