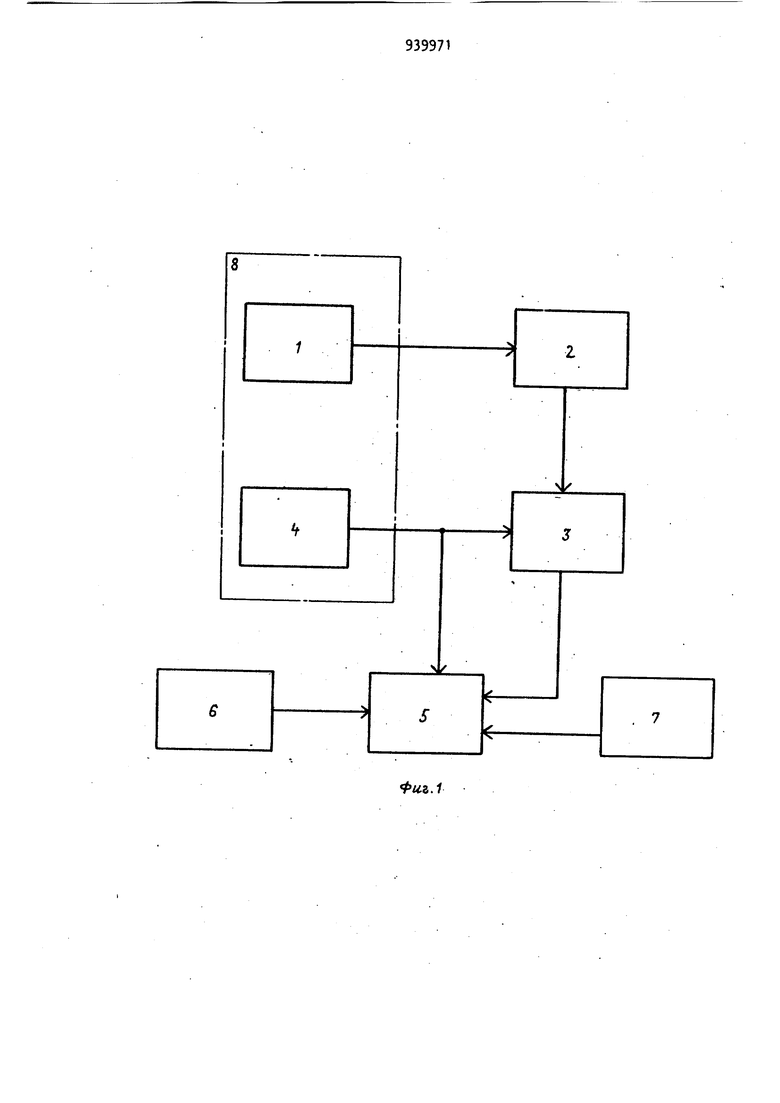
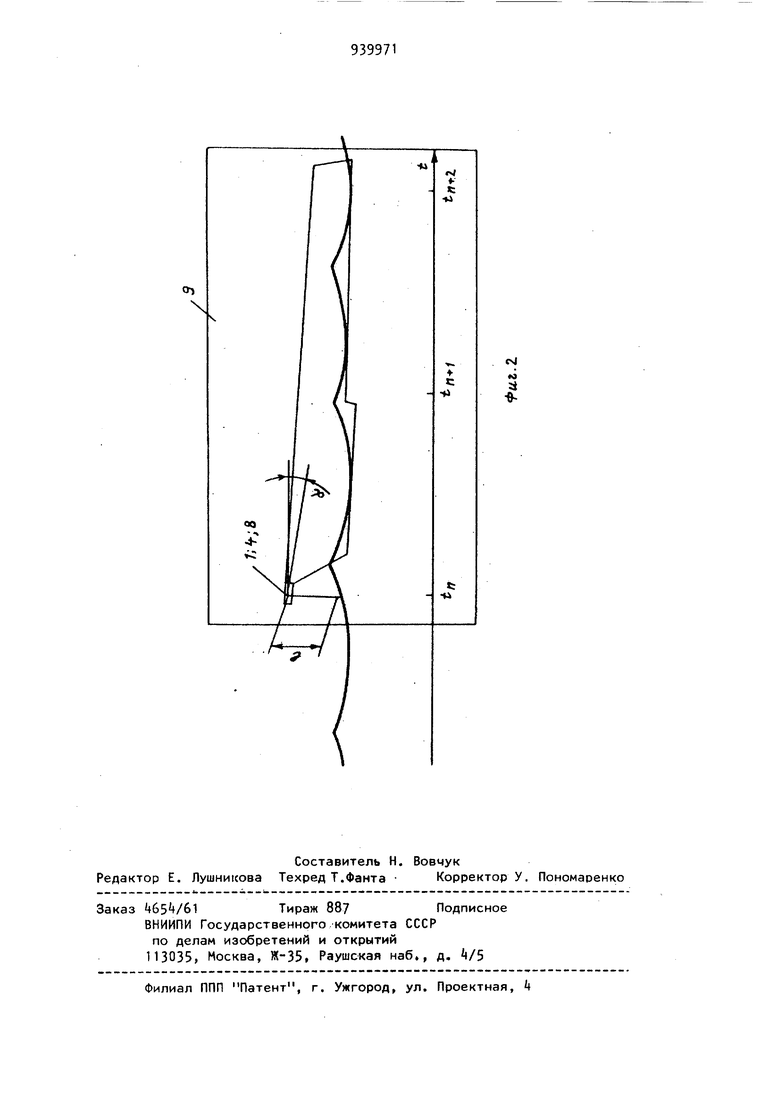
(5) СПОСОБ ОПРЕДЕЛЕНИЯ РЕЗУЛЬТИРУЮЩЕГО ВЕКТОРА НАГРУЗКИ НА ДВИЖУЩИЙСЯ ОБЪЕКТ ОТ ПРОФИЛЯ Изобретение относится к измери тельной технике и может быть использовано при мореходных испытаниях гид росамолетов и судов. Известно устройство, в котором ре ализован способ определения нагрузок на движущийся по водной поверхности гидросамолет, когда измеряются нагрузки на него и отдельно параметры волнения в районе испытаний буйковым волномером fl J. Наиболее близким по технической сущности к предлагаемому является ус ройство, содержащее два датчика давления, симметрично расположенных в средней части корпуса судна 27. Недостатком этих способов является то, что они не позволяют рассматривать нагрузки на объект во взаимосвязи с пересекаемым волновым профилем. Цель изобретения - повышение точности путем определения результируюМОРСКОГО ВОЛНЕНИЯ щего вектора нагрузки во взаимосвязи с пересекаемым профилем. Поставленная цель достигается тем, что одновременно регистрируют в единой шкале времени расстояние от фиксированной точки объекта до водной поверхности, углы дифферента объекта и пересекаемый объектом волновой профиль путем измерения перегрузок в этой фиксированной точке, двойного интегрирования перегрузок и последующего вычитания из расстояния от фиксированной точки до водной поверхности, и по углу дифферента и расстоянию от фиксированной точки до водной поверхности ориентируют шаблон объекта на волновом профиле. На фиг. 1 приведена блок-схема устройства, реализующего предлагаемый способ; на фиг, 2 - схема, поясняющая способ. Устройство содержит акселерометр 1, вертикальной перегрузки,двойной , интегратор 2, схему 3 вычитания, 39 бесконтактный измеритель 4 расстояния, регистратор 5, блок 6 акселерометров перегрузки по осям X,Y и Z, преобразователь 7 дифферента объекта гидроплатформу 8. Устройство работает следующим образом. При движении объекта по взволнованной водной поверхности, бесконтакт ный измеритель расстояния Ц ( например, акустический) выдает сигнал, пропорциональный расстоянию до водной поверхности в каждый, момент времени, который фиксируется рег-истратором 5 и подается на вход схемы 3 вычитания. Этот сигнал состоит из сигнала, пропорционального огибающей волновог профиля, и сигнала пропорционального вертикальным перемещениям объекта в месте установки бесконтактного измерителя расстояния k. Акселерометр 1 установлен с.овместно с бесконтактным измерителем расстояния k и при движении объекта выдает сигнал, пропорциональный вертикальным перегрузкам. Эти перегрузки после интегрирования двойным интегратором 2 преобразуются в сигнал пропорциональный вертикальным перемещениям объекта в месте установки акселерометра 1, который подается на второй вход схемы 3 вычитания, В схе ме вычитания из сигнала бесконтактно го измерителя расстояния k вычитает ся сигнал двойного интегратора 2, в результате чего с выхода схемы 3 вычитания снимается сигнал, пропорциональный профилю волнения, который фиксируется регистратором 5Одновременно при движении объект на регистратор 5 фиксируются нагруз ки по осям X, Y и Z объекта, необходимые для проверки правильности выбора конструктивных элементов, ко торые выдаются блоком 6 акселерометров и.углы дифферента объекта, в даваемые первичным преобразователем 7. Для устранения влияния крена и дифферента объекта на измерение вол нового профиля акселерометр 1 и бес контактный измеритель 4 расстояния установлены на общей гидроплатформе 14 Для анализа перегрузок, возникающих при движении объекта по водной гГоверхности, на графике (фиг.2) строят пересекамый им волновой профиль. Для требуемого момента времени по измеренному расстоянию Е фиксированной точки объекта до водной поверхности и углу дифферента ( , на волновом профиле располагают шаблон 9 с контуром испытываемого объекта. В результате получают расположение объекта относительно элементов волнения. Предлагаемый способ позволяет проанализировать природу возникновения перегрузок на объект для принятия необходимых конструкторских или других решений. Формула изобретения Способ определения результирующего вектора нагрузки на движущийся объект от профиля морского волнения, заключающийся в отдельном измерении параметров волнения и результирующего вектора нагрузки, отличающийся тем, что, с целью повышения точности путем определения результирующего вектора нагрузки во взаимосвязи с пересекаемым профилем, одновременно регистрируют в единой шкале времени расстояние от фиксированной точки объекта до водной поверхности, углы дифферента объекта и пересекаемый объектом волновой профиль путем измерения перегрузок в этой фиксированной точке, двойного инfeгpиpoвaния перегрузок и последующего вычитания из расстояния от фиксированной точки до водной поверхности, и по углу дифферента и расстоянию от фиксированной точки до водной поверхности ориентируют шаблон объекта на волновом профиле. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 266866, кл. G 01 С 13/00, 1965. 2.Глуховский В. X, Исследование морского ветрового волнения. Л., Гидрометиоиздат, 1966, с.26,(прототип) .
Фиг.1
evj «о 2i
-&
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С БОРТА ДВИЖУЩЕГОСЯ СУДНА | 2014 |
|
RU2563314C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С БОРТА ДВИЖУЩЕГОСЯ СУДНА | 2010 |
|
RU2439494C1 |
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |
| Устройство для определения параметров морских волн | 1978 |
|
SU783584A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА НА ПЛАВУ | 1992 |
|
RU2046287C1 |
| Способ измерения частоты и амплитуды морских ветровых волн | 1991 |
|
SU1812429A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2008 |
|
RU2384861C1 |
| СПОСОБ ПОСТРОЕНИЯ ПРОСТРАНСТВЕННОЙ ТРАЕКТОРИИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ПО ЗАРЕГИСТРИРОВАННЫМ ДАННЫМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2193989C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| СПОСОБ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ВОЗДУШНОЙ СПУТНОЙ СТРУИ ЗА ТРАНСПОРТНЫМ СРЕДСТВОМ | 1993 |
|
RU2088487C1 |