Изобретение относится к области неконтактных океанографических изменений и предназначено для использования в информационно-измерительных комплексах определения статистических характеристик морского волнения с летательного аппарата на плаву.
Известен ультразвуковой способ измерения волнения, состоящий в посылке ультразвуковых импульсов на морскую поверхность, усилении и регулировке по амплитуде отраженных импульсов и определении расстояния до поверхности по моменту превышения ими заданного уровня, причем усиление регулируют по частоте появления отраженных сигналов, величина которых ниже заданного уровня.
Недостатком этого способа является большая погрешность измерений волнения из-за вертикальных перемещений источника и приемника излучения, расположенных на летательном аппарате, находящемся на поверхности моря (на плаву) из-за колебаний морской поверхности, вызванных волнением.
Известен акустический способ определения высоты морских волн, состоящий в облучении поверхности воды акустической энергией и приеме отраженных сигналов, причем используются две приемоизлучающие системы, разнесенные по вертикали, которые возбуждают и принимают два тонально-импульсных акустических сигнала, относительная разность частот которых равна относительному вертикальному разнесению систем, фильтрации отраженных сигналов, выделении их огибающих и измерении частотно-пространственного в вертикальной плоскости коэффициента взаимной корреляции огибающих и нахождении после этого среднеквадратичной высоты σ h морских волн по формуле
σh
 где В(f1, f2) коэффициент взаимной корреляции;
где В(f1, f2) коэффициент взаимной корреляции;
ΔК разность волновых чисел.
Недостатком этого способа является большая погрешность измерения высоты морских волн из-за невозможности размещения на летательном аппарате двух приемоизлучающих систем на значительно отличающихся высотах.
Наиболее близким по своей технической сущности к изобретению является способ определения расстояния до водной поверхности, использующий посылки на водную поверхность импульсов оптического излучения, причем отраженного сигнала и определение расстояния до водной поверхности по времени прихода отраженного сигнала, причем из отраженного сигнала выделяют спектр фотолюминесценции, который используют для определения расстояния.
Недостатком этого способа также является большая погрешность измерения высоты морских волн из-за вертикальных перемещений источника и приемника оптических импульсов, расположенных на летательном аппарате, находящемся на плаву, под действием морского волнения.
Цель изобретения повышение точности измерения высоты морских волн. Это достигается тем, что при способе определения высоты морских волн с летательного аппарата на плаву, основанном на облучении морской поверхности импульсным сигналом, приема отраженного сигнала и определении текущего расстояния до морской поверхности по времени прихода отраженного сигнала, с помощью размещенного рядом с приемоизлучающей системой акселерометра измеряют вертикальные ускорения приемоизлучающей системы, обусловленные действием морского волнения на приводненный летательный аппарат, по измеренным вертикальным ускорениям приемоизлучающей системы определяют вертикальные составляющие ее скорости и соответствующие им вертикальные перемещения приемоизлучающей системы, вычитают значения полученных вертикальных перемещений из результатов определения текущего расстояния до морской поверхности и получают расстояние от морской поверхности до условно неподвижной точки, совпадающей с точкой размещения приемоизлучающей системы при отсутствии морского волнения, анализируют флуктуации текущих значений полученного расстояния через промежутки времени, равные принятому при измерениях интервалу дискретизации, и определяют среднеквадратичное значение высоты морских волн.
Техническая сущность предложенного способа заключается в следующем.
Фюзеляж летательного аппарата изменяет положение в пространстве под действием колебаний морской поверхности. В силу того, что для вертикального зондирования поверхности под приемоизлучающей системой должно быть свободное пространство, не занятое элементами конструкции летательного аппарата, система может быть размещена только на крыле летательного аппарата. Крыло совершает колебания при изменении крена, дифферента и вертикальных перемещениях фюзеляжа.
Таким образом, измеренные значения hn расстояния от морской поверхности до места размещения приемоизлучающей системы представляют собой сумму расстояния от условно неподвижной точки, совпадающей с точкой размещения системы при абсолютно спокойной поверхности, и приращения высоты установки приемоизлучающей системы над поверхностью, вызванного крена, дифферентом и вертикальными перемещениями фюзеляжа под действием волнения поверхности моря.
Прямое определение среднеквадратичного значения высоты по известной формуле
σh где N количество отсчетов в пределах анализируемой реализации;
где N количество отсчетов в пределах анализируемой реализации;
n индекс, соответствующий отсчетам, полученным в момент времени nT, Т интервал дискретизации, правомерно только для приемоизлучающей системы, установленной в фиксированной точке пространства над поверхностью, не испытывающей возмущения положения за счет колебаний морской поверхности. Примерами реализации такого способа служат измерители высоты волн, размещенные на эстакадах в открытом море.
Использование известного способа в условиях летательного аппарата, находящегося на плаву, приводит к ошибке измерения высоты волн. Причем ошибка растет с ростом высоты волн. Если размеры волн соизмеримы с размерами летательного аппарата или превышают их, то абсолютное значение погрешности соизмеримо с высотой волн.
Для устранения погрешности осуществляется измерение параметров собственного перемещения приемоизлучающей системы, установленной на крыле летательного аппарата, и вычитание их результата измерения текущих значений высоты. В результате погрешность измерения высоты волн σ hуменьшается до величины, определяемой погрешностью определения вертикальных перемещений с помощью акселерометра.
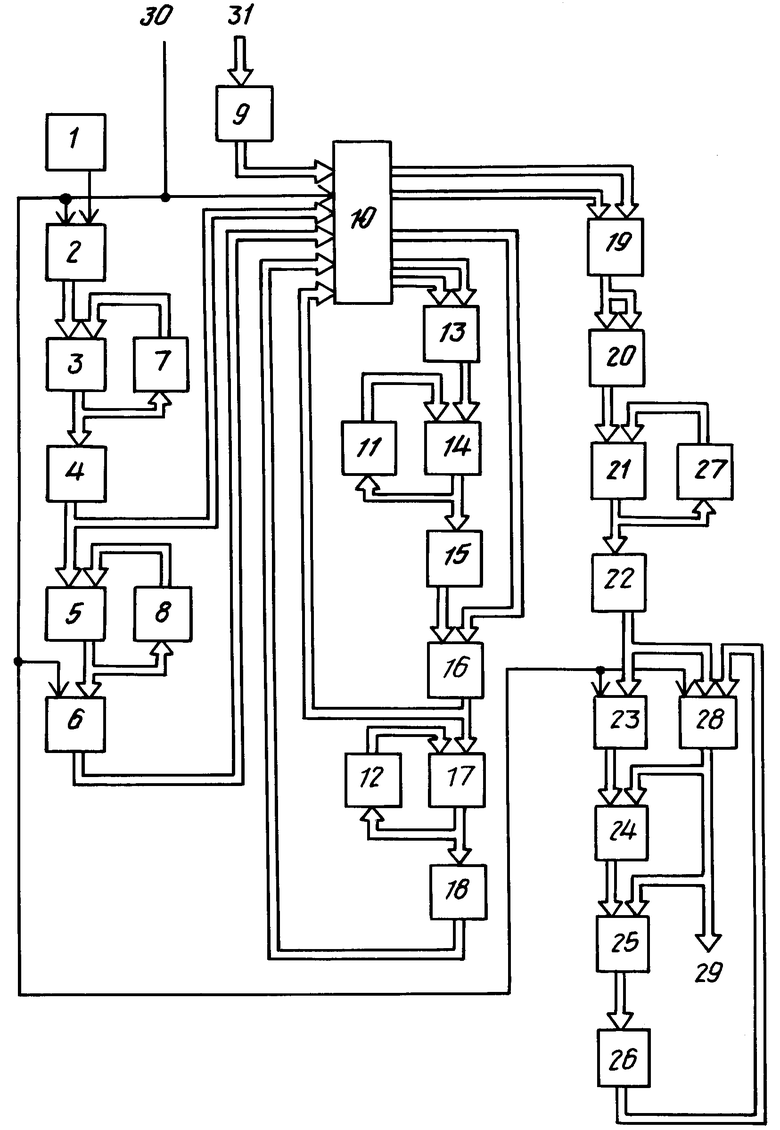
На чертеже приведена структурная схема устройства для осуществления предложенного способа измерения высоты волн в соответствии с изобретением.
Устройство содержит акселерометр 1, аналого-цифровой преобразователь (АЦП) 2, первый сумматор 3, первый блок умножения 4, второй сумматор 5, первый блок деления 6, первый и второй регистры 7 и 8, блок ввода 9, блок 10 памяти объемом 2N + +2 чисел, третий и четвертый регистры 11 и 12, первый блок вычитания 13, третий сумматор 14, второй блок умножения 15, второй блок вычитания 16, четвертый сумматор 17, второй блок деления 18, третий блок вычитания 19, блок возведения в квадрат 20, пятый сумматор 21, третий блок деления 22, пятый регистр 23, четвертый блок деления 24, шестой сумматор 25, пятый блок деления 26, шестой и седьмой регистры 27 и 28.
Выход 29 является выходом устройства, входы 30, 31 являются соответственно управляющими и информационным входами устройства.
Устройство позволяет по измеренным значениям выборок ускорения приемоизлучающей системы аn и значениям расстояния до водной поверхности hn определить среднеквадратичную высоту волн по формуле
σh , (1) где Sn=T
, (1) где Sn=T vi вертикальные перемещения приемоизлучающей системы;
vi вертикальные перемещения приемоизлучающей системы;
vi + v0 вертикальные составляющие скорости приемоизлучающей системы;
+ v0 вертикальные составляющие скорости приемоизлучающей системы; = T
= T an разность вертикальной составляющей скорости приемоизлучающей системы и ее начального значения.
an разность вертикальной составляющей скорости приемоизлучающей системы и ее начального значения.
Значение квадратного корня в формуле (1) определяется методом итераций в соответствии с равенством
σ +
+ 
 (2) где D- величина подкоренного выражения в формуле (1);
(2) где D- величина подкоренного выражения в формуле (1);
k номер итерации.
Устройство работает следующим образом.
Текущее значение ускорения а с выхода акселерометра 1, подключенного к первому входу АЦП 2, по управляющему сигналу, поданному на его второй вход с управляющего входа устройства 30, преобразуются в цифровой код, соответствующий отсчетам в моменты времени, отделенные интервалом дискретизации Т. Отсчеты подаются на первый вход первого сумматора 3, на второй вход которого с выхода первого регистра 7, подключенного входом к выходу сумматора 3, поступают задержанные на время Т результаты суммирования. При этом на выходе первого сумматора 3 в моменты времени iТ получаются суммы  an Указанные суммы поступают на вход первого блока умножения 4, в котором хранится значение сомножителя Т. В результате перемножения на выходе блока получаются значения
an Указанные суммы поступают на вход первого блока умножения 4, в котором хранится значение сомножителя Т. В результате перемножения на выходе блока получаются значения  , которые поступают на первый вход второго сумматора. На второй вход второго сумматора поступают с выхода второго регистра 8 задержанные на время Т результаты с выхода второго сумматора. При этом на выходе второго сумматора получаются суммы
, которые поступают на первый вход второго сумматора. На второй вход второго сумматора поступают с выхода второго регистра 8 задержанные на время Т результаты с выхода второго сумматора. При этом на выходе второго сумматора получаются суммы  Выход второго сумматора подключен к первому входу первого блока деления 6, в котором хранится значение делителя N. В момент времени NT по управляющему сигналу, поданному с входа устройства 30 на второй вход блока деления 6, на его выходе в результате деления суммы
Выход второго сумматора подключен к первому входу первого блока деления 6, в котором хранится значение делителя N. В момент времени NT по управляющему сигналу, поданному с входа устройства 30 на второй вход блока деления 6, на его выходе в результате деления суммы  на N получается величина v0.
на N получается величина v0.
Одновременно с включением АЦП 2 в блок памяти 10 по управляющему сигналу, поступающему на его первый вход с входа устройства 30, начинается запись элементов массива hn, поступающих с входа 31 через блок ввода 9 на второй вход блока памяти 10 и элементов массива  , поступающих с выхода первого блока умножения 4 на третий вход блока памяти 10. Запись производится в темпе поступления информации. Таким образом, для записи N элементов одного и N элементов другого массивов требуется время NT, по истечении которого по управляющему сигналу, поступающему на первый вход блока памяти с входа 30, записывается поступающая на четвертый вход блока памяти с выхода первого блока деления 6 величина v0 и запись по второму, третьему и четвертому входам блока памяти прекращаются. После этого по управляющему сигналу, поступающему на первый вход блока памяти 10 с входа устройства 30, на первый выход памяти блока памяти поступают в порядке их записи элементы массива
, поступающих с выхода первого блока умножения 4 на третий вход блока памяти 10. Запись производится в темпе поступления информации. Таким образом, для записи N элементов одного и N элементов другого массивов требуется время NT, по истечении которого по управляющему сигналу, поступающему на первый вход блока памяти с входа 30, записывается поступающая на четвертый вход блока памяти с выхода первого блока деления 6 величина v0 и запись по второму, третьему и четвертому входам блока памяти прекращаются. После этого по управляющему сигналу, поступающему на первый вход блока памяти 10 с входа устройства 30, на первый выход памяти блока памяти поступают в порядке их записи элементы массива  , на второй выход элементы массива hn, на третий выход поступает величина v0. Первый выход блока памяти 10 подключен к первому, а третий выход блока памяти к второму входам первого блока вычитания 13. В результате вычисления разности на выходе первого блока вычитания получаются значения vi. Выход первого блока вычитания 13 подключен к первому входу третьего сумматора 14. На второй вход третьего сумматора 14 подаются с выхода третьего регистра 11, подключенного входом к выходу третьего сумматора 14, записанные результаты предыдущего суммирования. Таким образом, на выходе третьего сумматора 14 получаются значения сумм
, на второй выход элементы массива hn, на третий выход поступает величина v0. Первый выход блока памяти 10 подключен к первому, а третий выход блока памяти к второму входам первого блока вычитания 13. В результате вычисления разности на выходе первого блока вычитания получаются значения vi. Выход первого блока вычитания 13 подключен к первому входу третьего сумматора 14. На второй вход третьего сумматора 14 подаются с выхода третьего регистра 11, подключенного входом к выходу третьего сумматора 14, записанные результаты предыдущего суммирования. Таким образом, на выходе третьего сумматора 14 получаются значения сумм  vi. Выход третьего сумматора 14 подключен к входу второго блока умножения 15, в котором хранится значение сомножителя Т. На выходе второго блока умножения 15 получаются отсчеты Sn. Выход второго блока умножения 15 подключен к первому входу второго блока вычитания 16. На его второй вход, подключенный к третьему выходу блока памяти, подаются элементы массива hn. На выходе второго блока вычитания 16 получаются значения разности hn Sn. Выход второго блока вычитания 16 подключен к пятому входу блока памяти 10 и первому входу четвертого сумматора 17. Значение hn Sn в блоке памяти записывается в те же ячейки памяти, что и элементы массива
vi. Выход третьего сумматора 14 подключен к входу второго блока умножения 15, в котором хранится значение сомножителя Т. На выходе второго блока умножения 15 получаются отсчеты Sn. Выход второго блока умножения 15 подключен к первому входу второго блока вычитания 16. На его второй вход, подключенный к третьему выходу блока памяти, подаются элементы массива hn. На выходе второго блока вычитания 16 получаются значения разности hn Sn. Выход второго блока вычитания 16 подключен к пятому входу блока памяти 10 и первому входу четвертого сумматора 17. Значение hn Sn в блоке памяти записывается в те же ячейки памяти, что и элементы массива  по мере их освобождения. Второй вход четвертого сумматора 17 соединен с выходом четвертого регистра 12, подключенного входом к выходу четвертого сумматора 17. При таком включении на первый вход четвертого сумматора подаются сигналы с выхода второго блока вычитания, а на второй вход записанные результаты предыдущего суммирования. Таким образом, при поступлении на первый вход четвертого сумматора hn Sn на выходе получается сумма
по мере их освобождения. Второй вход четвертого сумматора 17 соединен с выходом четвертого регистра 12, подключенного входом к выходу четвертого сумматора 17. При таком включении на первый вход четвертого сумматора подаются сигналы с выхода второго блока вычитания, а на второй вход записанные результаты предыдущего суммирования. Таким образом, при поступлении на первый вход четвертого сумматора hn Sn на выходе получается сумма  (hn-Sn). Выход четвертого сумматора 17 соединен с входом второго блока деления 18, в котором хранится значение делителя N. В результате выполнения N-ной операции деления на его выходе получается величина
(hn-Sn). Выход четвертого сумматора 17 соединен с входом второго блока деления 18, в котором хранится значение делителя N. В результате выполнения N-ной операции деления на его выходе получается величина 
 (hn-Sn). Выход второго блока деления 17 подключен к шестому входу блока памяти 10.
(hn-Sn). Выход второго блока деления 17 подключен к шестому входу блока памяти 10.
По управляющему сигналу, поданному с входа 30 на первый вход блока памяти 10, полученное значение 
 (hn-Sn) записывается в блок памяти и поступает на его четвертый выход, а на пятый выход блока памяти поступают в порядке их записи элементы массива, содержащего значения hn Sn. Четвертый и пятый выходы блока памяти 10 подключены к первому и второму входам третьего блока вычитания 19. После вычитания разности на выходе блока вычитания получается значение выражения в квадратных скобах (1). Выход третьего блока вычитания подключен к первому и второму входам блока возведения в квадрат 20, вычисляющего произведение одинаковых сомножителей, поступающих с выхода блока 19. Выход блока возведения в квадрат соединен с первым входом пятого сумматора 21.
(hn-Sn) записывается в блок памяти и поступает на его четвертый выход, а на пятый выход блока памяти поступают в порядке их записи элементы массива, содержащего значения hn Sn. Четвертый и пятый выходы блока памяти 10 подключены к первому и второму входам третьего блока вычитания 19. После вычитания разности на выходе блока вычитания получается значение выражения в квадратных скобах (1). Выход третьего блока вычитания подключен к первому и второму входам блока возведения в квадрат 20, вычисляющего произведение одинаковых сомножителей, поступающих с выхода блока 19. Выход блока возведения в квадрат соединен с первым входом пятого сумматора 21.
На второй вход пятого сумматора подаются с выхода пятого регистра 27, подключенного входом к выходу пятого сумматора, записанные результаты предыдущих вычислений сумматора. Таким образом, на выходе пятого сумматора получаются суммы квадратов слагаемых, заключенных в квадратные скобки в (1). Выход пятого сумматора 21 подключен к первому входу третьего блока давления 22, в котором хранится делитель N.
В результате выполнения N-й операции деления на его выходе получается величина подкоренного выражения в (1), равная Д. Выход третьего блока деления подключен к первым входам пятого и седьмого регистров 23 и 28. После выполнения N-й операции деления по управляющему сигналу на вторых входах регистров 23 и 28, поданных с управляющего входа устройства 30, в оба регистра записывается величина подкоренного выражения D в (1), которая одновременно является нулевой итерацией решения (2). Выходы пятого и седьмого регистров 23 и 28 соединены с первым и вторым входами пятого блока деления 24, в котором определяется отношение  на k-й итерации. Выход пятого блока деления 24 соединен с первым входом шестого сумматора 25. Его второй вход подключен к выходу седьмого регистра 28. На первый вход сумматора 25 подается отношение
на k-й итерации. Выход пятого блока деления 24 соединен с первым входом шестого сумматора 25. Его второй вход подключен к выходу седьмого регистра 28. На первый вход сумматора 25 подается отношение  на k-й итерации, а на второй -у значение σhk. На выходе сумматора 25 получается сумма этих величин. Выход шестого сумматора 25 соединен с входом пятого блока деления 26, в памяти которого хранится делитель равный двум. Выход блока деления 26 подключен к третьему входу седьмого регистра 28. С выхода блока деления 26 очередная итерация σ hзаписывается в седьмом регистре 28 и процесс вычислений продолжается до получения заданной точности. Результат записывается в регистр 28 и полученное значение высоты волн σ h поступает с выхода регистра 28 на выход устройства 29.
на k-й итерации, а на второй -у значение σhk. На выходе сумматора 25 получается сумма этих величин. Выход шестого сумматора 25 соединен с входом пятого блока деления 26, в памяти которого хранится делитель равный двум. Выход блока деления 26 подключен к третьему входу седьмого регистра 28. С выхода блока деления 26 очередная итерация σ hзаписывается в седьмом регистре 28 и процесс вычислений продолжается до получения заданной точности. Результат записывается в регистр 28 и полученное значение высоты волн σ h поступает с выхода регистра 28 на выход устройства 29.
Предложенный способ позволяет существенно увеличить точность определения высоты морских волн с летательного аппарата, находящегося на плаву.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА НА ПЛАВУ | 1996 |
|
RU2112925C1 |
| СПОСОБ ИЗМЕРЕНИЯ НАПРАВЛЕНИЯ РАСПРОСТРАНЕНИЯ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА НА ПЛАВУ | 1993 |
|
RU2092792C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА | 1994 |
|
RU2104563C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА НА ПЛАВУ | 2000 |
|
RU2175111C1 |
| СПОСОБ ИЗМЕРЕНИЯ СРЕДНЕЙ ЧАСТОТЫ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА НА ПЛАВУ | 2001 |
|
RU2196961C1 |
| СПОСОБ ИЗМЕРЕНИЯ СТАТИСТИЧЕСКИХ ХАРАКТЕРИСТИК МОРСКОГО ВОЛНЕНИЯ С ЛЕТАТЕЛЬНОГО АППАРАТА | 1992 |
|
RU2012903C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С БОРТА ДВИЖУЩЕГОСЯ СУДНА | 2014 |
|
RU2563314C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С БОРТА ДВИЖУЩЕГОСЯ СУДНА | 2010 |
|
RU2439494C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ПРИЕМА ИНФОРМАЦИИ ПО ДВУХПРОВОДНОЙ ЛИНИИ СВЯЗИ | 1991 |
|
RU2023310C1 |
| СПОСОБ ИЗМЕРЕНИЯ СРЕДНЕЙ ЧАСТОТЫ МОРСКИХ ВОЛН | 2007 |
|
RU2337313C2 |
Использование: океанографические измерения, в информационно-измерительных комплексах определения статических характеристик морского волнения. Сущность изобретения: способ определения высоты морских волн с летательного аппарата на плаву основан на облучении морской поверхности импульсным сигналом, приеме отраженного сигнала и определении по времени его прихода текущего расстояния до морской поверхности. С помощью акселеметра, размещенного рядом с приемоизлучающей системой, измеряют ее вертикальные ускорения. определяют по ним вертикальные составляющие скорости и соответствующие им вертикальные перемещения приемоизлучающей системы, которые вычитают из значений текущего расстояния до морской поверхности. Анализируют флуктуации текущих значений полученного рассогласования при заданном интервале дискретизации и определяют среднеквадратичное значение высоты морских волн. 1 ил.
СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА НА ПЛАВУ, основанный на облучении морской поверхности импульсным сигналом, приеме отраженного сигнала и определении текущего расстояния до морской поверхности по времени прихода отраженного сигнала, отличающийся тем, что с помощью размещенного рядом с приемоизлучающей системой акселератора измеряют вертикальные ускорения приемоизлучающей системы, обусловленные действием морского волнения на приводненный летательный аппарат, по измеренным вертикальным ускорениям приемоизлучающей системы определяют вертикальные составляющие ее скорости и соответствующие им вертикальные перемещения приемоизлучающей системы, вычитают значения полученных вертикальных перемещений из результатов определения текущего расстояния до морской поверхности и получают расстояние от морской поверхности до условно неподвижной точки, совпадающей с точкой размещения приемоизлучающей системы в отсутствие морского волнения, анализируют флуктуации текущих значений полученного расстояния через промежутки времени, равные принятому при измерениях интервалу дискретизации, и определяют среднеквадратичное значение высоты морских волн.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ определения расстояний до водной поверхности | 1983 |
|
SU1151819A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
