Изобретение относится к области неконтактных океанографических измерений и может быть использовано в информационно-измерительных комплексах для определения статистических характеристик морского волнения с борта движущегося судна и получения информации об опасном для эксплуатации судна морском волнении.
Проблема нормирования волновых усилий, действующих на корпуса судов, представляет огромный интерес для проектирования и эксплуатации судов. Особенно важна эта проблема для судов смешанного плавания, у которых стандарт прочности значительно ниже морских судов неограниченного района плавания. Их эксплуатация в морских условиях становится возможной при выполнении ряда ограничений, среди которых одно из первых мест принадлежит ограничению по интенсивности волнения. Характеристикой интенсивности волнения в отечественной практике является величина волны 3% обеспеченности. Для судов смешанного плавания с классом Российского Речного Регистра эта величина находится в диапазоне от 2,0 до 3,5 м. При превышении разрешенной для данного судна высоты волны судоводитель должен принять решение об изменении курса судна и уходе к месту убежища. Поскольку на судне отсутствуют системы инструментального контроля за высотой волны, принятие такого решения носит субъективный характер.
Известны способы измерения высоты морских волн с движущегося объекта, основанные на использовании посылок на водную поверхность импульсов, приеме отраженного сигнала и определении расстояния до водной поверхности по времени прихода отраженного сигнала.
Так, известен способ измерения высоты морских волн с летательного аппарата на плаву (патент Российской Федерации N 2046287, кл. 6 G01C 13/00, 1995, бюлл. N 29), основанный на облучении морской поверхности импульсным сигналом, приеме отраженного сигнала и определения текущего расстояния до морской поверхности по времени приема отраженного сигнала и измерений с помощью размещенного рядом с приемоизлучающей системой акселерометра вертикальных ускорений приемоизлучающей системы, обусловленных действием морского волнения на приводненный летательный аппарат, по измеренным вертикальным ускорениям приемоизлучающей системы определяют вертикальные составляющие ее скорости и соответствующие им вертикальные перемещения приемоизлучающей системы, вычитают значения полученных вертикальных перемещений из результатов определения текущего расстояния до морской поверхности и получают расстояние от морской поверхности до условно неподвижной точки, совпадающей с точкой размещения приемоизлучающей системы при отсутствии морского волнения, анализируют флуктуации текущих значений полученного расстояния через промежутки времени, равные принятому при измерении интервалу дискретизации, и определяют среднеквадратическое значение высоты морских волн.
Недостаток этого способа - большие погрешности при обработке результатов в темпе поступления информации вследствие искажений, возникающих при определении вертикальных составляющих скорости приемоизлучающей системы и соответствующих вертикальных перемещений, а также низкая точность определения высоты морских волн, связанная с тем, что при определении высоты волн не учитываются перемещения приемоизлучающей системы вокруг горизонтальных осей.
Наиболее близким по своей технической сущности к заявляемому является способ измерения высоты морских волн с летательного аппарата на плаву (патент Российской Федерации N 2112925, МКИ G01C 13/00, БИ N 16, 1998), согласно которому определяют расстояние до водной поверхности по времени задержки отраженного сигнала с помощью совместно расположенной приемоизлучающей системы, определяют вертикальные ускорения приемоизлучающей системы, обусловленные действием морского волнения на приводненный летательный аппарат, с помощью акселерометра, вычитают сигналы и, анализируя сигналы, пропорциональные колебаниям морской поверхности, находят высоту морских волн, при этом сигнал, соответствующий расстоянию до водной поверхности, фильтруют фильтром с передаточной функцией K(p), в полосу прозрачности которого попадает спектр колебаний морской поверхности, а сигнал акселерометра фильтруют фильтром с передаточной функцией  , где p - комплексная частота, при этом вычитают сигналы с выходов обоих фильтров.
, где p - комплексная частота, при этом вычитают сигналы с выходов обоих фильтров.
Недостатком известного способа является низкая точность определения высоты морских волн, связанная с тем, что при определении высоты волн не учитываются перемещения приемоизлучающей системы вокруг горизонтальных осей.
Задача, на решение которой направлено изобретение, заключается в разработке способа измерения высоты морских волн с борта движущегося судна, характеризующегося точностью и информативностью полученных данных за счет измерения не только вертикального перемещения приемоизлучающей системы, но и ее перемещения вокруг горизонтальных осей.
Указанный технический результат достигается способом измерения высоты морских волн с борта движущегося судна, характеризующимся тем, что определяют расстояние до водной поверхности по времени задержки отраженного от водной поверхности сигнала с помощью сосредоточенной приемоизлучающей системы, жестко закрепленной на борту движущегося судна, определяют углы наклона приемоизлучающей системы по трем осям суммированием быстро меняющихся составляющих углов наклона, оцененных с помощью трех измерителей угловых скоростей, жестко связанных с приемоизлучающей системой, сигналы которых подвергают высокочастотной фильтрации, и медленно меняющихся составляющих углов наклона, оцененных с помощью трех акселерометров, жестко связанных с приемоизлучающей системой, сигналы которых подвергают низкочастотной фильтрации, после чего по величине углов наклона и расстоянию до водной поверхности приемоизлучающей системы вычисляют расстояние по вертикали от уровня приемоизлучающей системы до уровня точки отражения на водной поверхности, по величине углов наклона и величине ускорений по трем осям путем высокочастотной фильтрации и двойного интегрирования вычисляют вертикальное перемещение приемоизлучающей системы, определяют профиль морских волн, каждая точка которого вычисляется путем вычитания из расстояния по вертикали от уровня приемоизлучающей системы до уровня точки отражения на водной поверхности вертикального перемещения приемоизлучающей системы, с использованием известных методов статистической обработки результатов определяют высоту волны заданной обеспеченности и иные статистические характеристики волнения. Также, согласно изобретению, дополнительно осуществляют выравнивание комплексной частотной характеристики приемоизлучающей системы.
Сущность предложенного изобретения заключается в том, что в процессе осуществления способа определяют не только вертикальное перемещение приемоизлучающей системы, но и ее перемещение вокруг горизонтальных осей. Определение углов наклона приемоизлучающей системы с помощью трех акселерометров и трех измерителей угловых скоростей позволяет получить волновой профиль, анализируя который находят высоту морских волн заданной обеспеченности в условиях пространственного перемещения приемоизлучающей системы вместе с судном, что позволяет повысить точность и информативность способа. Применение выравнивания частотной характеристики приемоизлучающей системы позволяет оценивать более широкополосные волновые процессы.
На чертеже приведена структурная схема устройства для осуществления предложенного способа измерения высоты морских волн в соответствии с предлагаемым изобретением.
Устройство содержит приемоизлучающую систему 1, измерители угловых скоростей 2, 3 и 4, акселерометры 5,6 и 7, блок выравнивания комплексной частотной характеристики (КЧХ) 8, первый фильтр высоких частот (ФВЧ) 9, фильтр низких частот (ФНЧ) 10, блок оценки вертикальной проекции ускорения 11, блок оценки угловых перемещений 12, блок оценки медленно меняющихся углов наклона 13, второй ФВЧ 14, первый интегратор 15, третий ФВЧ 16, второй интегратор 17, четвертый ФВЧ 18, сумматор 19, блок оценки расстояния от уровня приемоизлучающей системы до уровня точки отражения на водной поверхности 20, блок вычитания оценки вертикальных перемещений приемоизлучающей системы 21, блок оценки статистик волнового процесса 22.
Приемоизлучающая система 1 соединена через блок выравнивания КЧХ 8 с блоком оценки расстояния от уровня приемоизлучающей системы до уровня точки отражения на водной поверхности 20. Выходы измерителей угловых скоростей 2, 3 и 4 через последовательно соединенные первый ФВЧ 9 и блок оценки угловых перемещений 12 подключены к первому входу сумматора 19. Выходы акселерометров 5, 6 и 7 через последовательно соединенные ФНЧ 10 и блок оценки медленно меняющихся углов наклона 13 подключены ко второму входу сумматора 19, выход которого соединен со вторым входом блока оценки расстояния от уровня приемоизлучающей системы до уровня точки отражения на водной поверхности 20 и первому входу блока оценки, вертикальной проекции ускорения 11, второй, третий и четвертый входы которого соединены с выходами акселерометров 5, 6 и 7, а выход через последовательно соединенные второй ФВЧ 14, первый интегратор 15, третий ФВЧ 16, второй интегратор 17 и четвертый ФВЧ 18 подключены к первому входу блока вычитания оценки вертикальных перемещений приемоизлучающей системы 21, второй вход которого соединен с выходом блока оценки расстояния от уровня приемоизлучающей системы до уровня точки отражения на водной поверхности 20, выход которого подключен к блоку оценки статистик волнового процесса 22.
Вход приемоизлучающей системы 1 является входом устройства, выходы блоков оценки статистик волнового процесса 22 и сумматора 19 являются выходами 1 и 2 всего устройства. Выход 1 содержит оцененные статистики волнового процесса, такие как высота волны заданной обеспеченности, средний период волны, корреляционные и спектральные характеристики волнового процесса. Выход 2 содержит информацию об углах бортовой и килевой качки.
Устройство работает следующим образом.
На вход приемоизлучающей системы 1, которая жестко привязана к борту судна, поступает отраженный от морской поверхности импульсный сигнал. По времени его прихода определяется текущее расстояние от морской поверхности до приемоизлучающей системы 1 по ее оси. С выхода приемоизлучающей системы 1 сигнал поступает на вход блока выравнивания комплексной частотной характеристики (КЧХ) 8, где осуществляется выравнивание амплитудно-частотной и фазово-частотной характеристик в области интересующих частот. Выравнивание может быть осуществлено по специальным алгоритмам (см., например, книгу Льюнг, Л. Идентификация систем. Теория для пользователя. / Л.Льюнг. Пер. с англ. / Под ред. Я.З.Цыпкина. - М.: Наука. Гл. ред. физ.-мат. лит., 1991. - 432 с. - ISBN 5-02-014511-4 или книгу Прокис, Д. Цифровая связь. / Д.Прокис. Пер. с англ. / Под ред. Д.Д.Кловского. - М.: Радио и связь, 2000. - 800 с. - ISBN 5-02-014511-4). Применение выравнивания частотной характеристики приемоизлучающей системы позволяет оценивать более широкополосные волновые процессы в тех случаях, когда в приемоизлучающую систему встроена фильтрующая система. При отсутствии встроенных фильтров блок выравнивания вырождается во всепропускающий фильтр.
Измерители угловых скоростей 2, 3, 4 и акселерометры 5, 6, 7 жестко привязаны к приемоизлучающей системе 1, что позволяет по их показаниям оценивать положение и ориентацию в пространстве приемоизлучающей системы 1. С измерителей угловых скоростей 2, 3 и 4 в первый ФВЧ 9 поступают сигналы, пропорциональные угловым скоростям приемоизлучающей системы 1 вокруг трех осей подвижной системы координат, привязанной к приемоизлучающей системе 1. В первом ФВЧ 9 осуществляется подавление низкочастотных компонент оценок угловых скоростей, которые могут вызвать существенную ошибку при оценивании угловых перемещений в блоке оценки угловых перемещений 12. В блоке оценки угловых перемещений 12 оцениваются угловые перемещения приемоизлучающей системы 1 в неподвижной системе координат, привязанной к Земле. Для этого сначала оцениваются угловые перемещения приемоизлучающей системы 1 в подвижной системе координат, привязанной к ней. При этом учитывается, что угловая скорость является производной от углового перемещения по времени. Переход от подвижной системы координат к неподвижной осуществляется с помощью известной формулы поворота осей координат. При замене системы OXYZ новой системой OX'Y'Z' с тем же началом старые координаты точки выражаются через новые формулы
где  есть угол между векторами i и i', т.е. между новой и старой осью абсцисс,
есть угол между векторами i и i', т.е. между новой и старой осью абсцисс,  - угол между новой осью ординат и старой осью абсцисс и т.д. (см., например, книгу: Выгодский М.Я. Справочник по высшей математике. / М.Я.Выгодский. - М.: Физматгиз, 1963. - 872 с: ил.).
- угол между новой осью ординат и старой осью абсцисс и т.д. (см., например, книгу: Выгодский М.Я. Справочник по высшей математике. / М.Я.Выгодский. - М.: Физматгиз, 1963. - 872 с: ил.).
На выходе блока оценки угловых перемещений 12 отсутствует информация о медленно меняющихся углах наклона приемоизлучающей системы 1. Ее можно получить, оценивая направление ускорения свободного падения. Для этого сигналы с акселерометров 5, 6 и 7 подвергают низкочастотной фильтрации в ФНЧ 10, в результате которой подавляются составляющие ускорения, обусловленные относительно быстрыми перемещениями судна, а компоненты, связанные с притяжением Земли, остаются. По соотношению проекций ускорения свободного падения на оси акселерометров в блоке оценки медленно меняющихся углов наклона 13 оцениваются медленно меняющиеся углы наклона. В сумматоре 19 суммируются оцененные быстро и медленно меняющиеся углы наклона приемоизлучающей системы 1.
Так как углы наклона приемоизлучающей системы 1 изменяются при движении судна, то ее показания не соответствуют ее уровню относительно водной поверхности. На основании оцененных в сумматоре 19 углов наклона в блоке оценки расстояния от уровня приемоизлучающей системы до уровня точки отражения на водной поверхности 20 пересчитываются показания приемоизлучающей системы 1 в разность уровней приемоизлучающей системы 1 и точки отражения на водной поверхности. Выход сумматора 19 имеет и самостоятельное значение, так как наклоны приемоизлучающей системы 1 определяются наклонами судна. Поэтому выход 2 устройства несет полезную информацию измерительной системы о величинах килевой и бортовой качек.
На выходе блока оценки расстояния от уровня приемоизлучающей системы 1 до уровня точки отражения на водной поверхности 20 имеем сумму 3-х компонент, а именно: среднего расстояния от поверхности воды до приемоизлучающей системы 1, вертикального перемещения приемоизлучающей системы 1 и вертикального перемещения водной поверхности. Только последняя компонента является полезной. Средний уровень расположения приемоизлучающей системы 1 обычно не важен, так как при вычислении высоты волны величина среднего уровня игнорируется. Однако при необходимости оценить средний уровень можно путем усреднения показаний блока оценки расстояния от уровня приемоизлучающей системы 1 до уровня точки отражения на водной поверхности 20. Для оценки вертикального перемещения приемоизлучающей системы 1 используется следующее.
В блоке оценки вертикальной проекции ускорения 11 на основании данных с акселерометров 5, 6 и 7 и оценок углов наклона с сумматора 19 вычисляется вертикальная проекция ускорения. Затем последовательным фильтрованием во втором ФВЧ 14, первым интегрированием в интеграторе 15, фильтрованием в третьем ФВЧ 16, вторым интегрированием в интеграторе 17 и фильтрованием в четвертом ФВЧ 18 выполняется подавление низкочастотных составляющих и двойное интегрирование. Интегрирование нужно выполнять для оценивания вертикального перемещения, так как ускорение - это вторая производная от перемещения по времени. Второй и третий ФВЧ 14 и 16 нужны, чтобы после интеграторов ошибка акселерометров 5, 6 и 7 не увеличивалась катастрофически из-за очень большого усиления интегратором 15 низкочастотных сигналов. Четвертый ФВЧ 18 должен обладать слабыми фильтрующими свойствами, его назначение в устранении накопления ошибок, связанных с квантованием в аналого-цифровых и цифровых устройствах.
В блоке вычитания оценки вертикальных перемещений приемоизлучающей системы 21 корректируются показания блока оценки расстояния от уровня приемоизлучающей системы до уровня точки отражения на водной поверхности 20 путем устранения вертикальных перемещений приемоизлучающей системы 1 на основании оценок на выходе четвертого ФВЧ 18.
Сигнал с выхода блока вычитания оценки вертикальных перемещений приемоизлучающей системы 21 поступает на блок оценки статистик волнового процесса 22, в котором происходит оценивание статистик волнового процесса. Количество и набор статистик может варьироваться для разных измерительных систем. Обязательно оценивается высота волны с заданной обеспеченностью. Дополнительно могут быть оценены такие статистики волнового процесса, как средний период волны, корреляционные и спектральные характеристики волнового процесса и другие (см., например, книгу: Давидан, И.Н. Ветровое волнение как вероятностный гидродинамический процесс. / И.Н.Давидан, Л.И.Лопатухин, В.А.Рожков. - Л.: Гидрометеоиздат, 1978. - 287 с). Полученные оценки поступают на выход блока оценки статистик волнового процесса 22, который является выходом 1 всего устройства.
Блоки 8-22 могут быть выполнены программно, например, на распределенном вычислительном устройстве (ВУ), в которое входят быстродействующее ВУ на базе микроконтроллера и ВУ на базе ЭВМ.
Таким образом, описанное устройство не содержит неизвестных ранее блоков и элементов и полностью реализует все операции в предложенном способе определения высоты морских волн.
Благодаря введению новых операций: определения углов наклона приемоизлучающей системы с помощью трехосевого акселерометра и трехосевого измерителя угловых скоростей предложенный способ позволяет оценивать профиль волны, анализируя который находят высоту морских волн в условиях пространственного перемещения судна непосредственно с его борта. Способ является высокоточным, имеет высокую информативность полученных данных и позволяет осуществить измерение не только высоты волн, но и расширить перечень вычисляемых статистических характеристик волнового процесса.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С БОРТА ДВИЖУЩЕГОСЯ СУДНА | 2014 |
|
RU2563314C1 |
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2272739C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2008 |
|
RU2384861C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА НА ПЛАВУ | 1992 |
|
RU2046287C1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2467914C1 |
| СПОСОБ ИЗМЕРЕНИЯ НАПРАВЛЕНИЯ РАСПРОСТРАНЕНИЯ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА НА ПЛАВУ | 1993 |
|
RU2092792C1 |
| МАЛОГАБАРИТНЫЙ ДОННЫЙ СЕЙСМИЧЕСКИЙ МОДУЛЬ | 2014 |
|
RU2554283C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА НА ПЛАВУ | 1996 |
|
RU2112925C1 |
| БУЙ ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК МОРСКИХ ВЕТРОВЫХ ВОЛН | 2014 |
|
RU2561229C1 |
Изобретение относится к неконтактным океанографическим измерениям и может быть использовано для определения статистических характеристик морского волнения с борта движущегося судна. Техническим результатом является повышение точности и информативности измерения высоты морских волн с борта движущегося судна. В способе измерения высоты морских волн определяют расстояние до водной поверхности по времени задержки отраженного от водной поверхности сигнала с помощью сосредоточенной приемоизлучающей системы. Определяют углы наклона приемоизлучающей системы и медленно меняющихся составляющих углов наклона. По величине углов наклона и расстоянию до водной поверхности приемоизлучающей системы вычисляют расстояние по вертикали от уровня приемоизлучающей системы до уровня точки отражения на водной поверхности. Вычисляют вертикальное перемещение приемоизлучающей системы. Определяют профиль морских волн. Определяют высоту волны заданной обеспеченности и иные статистические характеристики волнения. 1 ил.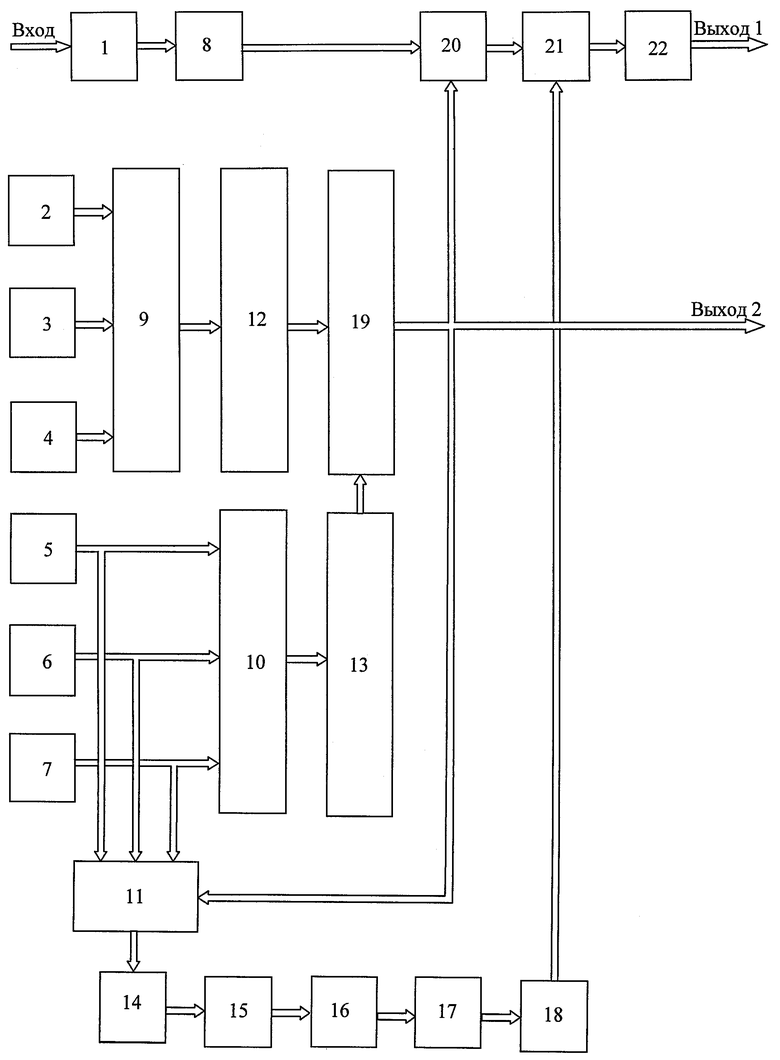
Способ измерения высоты морских волн с борта движущегося судна, характеризующийся тем, что определяют расстояние до водной поверхности по времени задержки отраженного от водной поверхности сигнала с помощью сосредоточенной приемоизлучающей системы, жестко закрепленной на борту судна, определяют углы наклона приемоизлучающей системы по трем осям суммированием быстро меняющихся составляющих углов наклона, оцененных с помощью трех измерителей угловых скоростей, жестко связанных с приемоизлучающей системой, сигналы которых подвергают высокочастотной фильтрации, и медленно меняющихся составляющих углов наклона, оцененных с помощью трех акселерометров, жестко связанных с приемоизлучающей системой, сигналы которых подвергают низкочастотной фильтрации, после чего по величине углов наклона и расстоянию до водной поверхности приемоизлучающей системы вычисляют расстояние по вертикали от уровня приемоизлучающей системы до уровня точки отражения на водной поверхности, по величине углов наклона и величине ускорений по трем осям путем высокочастотной фильтрации и двойного интегрирования вычисляют вертикальное перемещение приемоизлучающей системы, определяют профиль морских волн, каждая точка которого вычисляется путем вычитания из расстояния по вертикали от уровня приемоизлучающей системы до уровня точки отражения на водной поверхности вертикального перемещения приемоизлучающей системы, с использованием известных методов статистической обработки результатов определяют высоту волны заданной обеспеченности и иные статистические характеристики волнения.
| Способ измерения параметров морской поверхности | 1990 |
|
SU1768964A1 |
| Устройство для измерения параметров морских волн | 1987 |
|
SU1786373A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 1996 |
|
RU2137153C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2008 |
|
RU2384861C1 |
| JP 5034450 A, 09.02.1993 | |||
| JP 10325720 A, 08.12.1998. | |||

