Изобретение относится к области виброметрии и может быть использовано для первичной оценки динамических состояний рабочих органов вибрационных технологических машин.
Устройство и способ для оценки динамических состояний рабочих органов вибрационных технологических машин заключается в том, что на объект закрепляют измерительное устройство для оценки динамического состояния. Устройство образовано прозрачным корпусом с внешними креплениями, двумя внутренними кронштейнами, к которым на упругих элементах подвешен твердотельный инерционный элемент (в виде рычага) с нанесенной по его длине системой координат с началом в центре тяжести, концы которого снабжены роликами, с ободами, находящимися внутри направляющих, обеспечивающих вертикальные движения и тремя вибромаркерами, расположенными в точках крепления упругих элементов к кронштейнам и в их средней точке. В процессе колебаний контролируемого объекта (рабочего органа) инерционный элемент совершает вынужденные установившиеся колебания под действием кинематических возмущений со стороны кронштейнов, закрепленных на корпусе. При определенных динамических условиях на инерционном элементе возникает узел колебаний - точка, амплитуда колебаний которой равна нулю или существенно меньше амплитуд колебаний концевых точек. На основе экспериментально установленной координаты узла колебаний, расположенного на инерционном элементе, и амплитуд колебаний трех контрольных точек, в которых расположены вибромаркеры, с помощью формул определяется связность и частота вынужденных колебаний контролируемого объекта, рассматриваемого как твердое тело.
Технический результат предлагаемого решения заключается в простом конструкторском исполнении устройства для оценки динамического состояния контролируемого объекта, рассматриваемого как твердое тело, и определения существенных характеристик в виде коэффициента связности и частоты колебаний.
Изобретение предназначено для оценки параметров динамических состояний рабочего органа вибрационных технологических машин, представляющего собой механическую колебательную систему, образованную массивным твердым телом. Изобретение позволяет произвести первичную оценку динамического состояния, рассматриваемого как совокупность частоты колебаний и распределения амплитуд колебаний точек рабочего органа, в решении задач управления динамическим качеством технологических процессов. Примерами задач управления динамическим качеством служат процессы вибрационного упрочнения деталей, обработки полостей гранулированными рабочими средами, транспортировки и сепарации сыпучих смесей, в которых используются технологические машины, оснащенные рабочими органами в виде твердых тел, совершающих периодические колебания. Эффективность подобных технологических процессов, производительность вибростендов и вибрационных технологических машин зависят от частоты колебаний и от структуры вибрационного поля, то есть от распределения амплитуд колебаний точек рабочих органов по их длинам; обобщающей характеристикой распределения амплитуд колебаний точек твердого тела являются связность амплитуд колебаний, рассматриваемая как отношение амплитуд колебаний контрольных точек. Для технологических процессов, таких как вибрационное упрочнение длинномерных деталей, необходимо, чтобы вибрационные поля имели однородную структуру, которая может быть интерпретирована как равномерное распределение амплитуд, обладающих связностью равной единице. Вместе с тем, ряд вибрационных технологических машин имеет более сложные формы вибрационных полей, для которых связности амплитуд колебаний на фиксированных частотах служат специфическими оценками характера неоднородностей вибрационных полей.
На практике задачи для оценки динамических состояний рабочих органов вибрационных технологических машин сталкиваются с необходимостью установки датчиков на рабочие органы, что влечет ряд негативных последствий. При оценке динамического состояния рабочего органа вибрационной технологической машины с помощью инерционных датчиков необходимо учитывать, что при установке на рабочую поверхность, совершающую колебания на частоте 15 Гц с амплитудой 5 мм, ряд датчиков может выйти их строя в течении производственного процесса; использование серии проводных датчиков в производственных помещениях сопряжено с потенциальным нарушением требований безопасности или созданием помех для выполнения трудовых функций персоналом; использование оптических средств оценки динамических характеристик связано с развертыванием достаточно дорогостоящего оборудования в производственных цехах, в своем большинстве не приспособленных для дополнительных оптических измерительных средств, так же обладающих специфическими требованиями для получения достоверного результата измерений.
Устройства и способы оценки динамических состояний технических объектов в целом реализуются в двух направлениях, которые ориентированы на локальную оценку динамических состояний, к примеру, с помощью установки датчика в фиксированную точку, или на оценку интегральных характеристик движения технического объекта, когда динамическое состояние оценивается с помощью установки системы датчиков и определения обобщенной или интегральной характеристики динамического состояния.
Измерительные устройства, как правило, представляют собой сложные системы аппаратных и программных средств, которые должны обеспечивать работу и алгоритмические расчеты в достаточно агрессивных условиях, включая вибрационную нагрузку. Попытка оценки динамического состояния рабочего органа вибрационной технологической машины может быть предпринята с помощью датчиков, позволяющих проводить анализ амплитуд и частот колебаний.
Известен способ и устройство для анализа колебаний, а также база данных образов для них и применение базы данных образов (УЛЬРИХ Зойте (DE), «Способ и устройство для анализа колебаний, а также база данных образов для них и применение базы данных образов», RU 2011122813 А, МПК G01H 1/00, опубл. 20.12.2012, Бюл. №35). Способ анализа колебаний, при котором регистрируют и обрабатывают колебания, возникающие во время использования детали, при контроле детали и/или во время обработки заготовки резаньем, сваркой, деформацией, соединением и/или разъединением и т.п., причем колебательный спектр регистрируют в разное время или (квази) непрерывно или подвергают многомерному анализу.
Рассматриваемый способ и устройство позволяет проводить сложный комплексный анализ характеристик колебаний деталей в различных режимах. Вместе с тем, непосредственная оценка частоты колебаний и связности амплитуд колебаний точек объекта, рассматриваемого как твердое тело, не нашла отражения в описании функций изобретения.
Известно устройство контроля амплитуды механических колебаний (Хмелев В.Н. и др, «Устройство контроля амплитуды механических колебаний», RU 149707 U1, МПК G01H 1/00, опубл. 20.01.2015, Бюл. №2). Устройство контроля амплитуды механических колебаний, содержащее последовательно установленные в корпусе и акустически связанные между собой заостренный с одного конца металлический волновод и пьезоэлектрический элемент, отличающееся тем, что металлический волновод со стороны, противоположной заостренному концу, снабжен контактной площадкой, размер которой не превышает размера пьезоэлемента. Устройство контроля амплитуды механических колебаний может быть использовано для измерения амплитуды механических колебаний в локальной области поверхности твердого тела. Вместе с тем, настоящее устройство не позволяет непосредственно определять интегральные характеристики колебания объекта, как твердого тела, выражающиеся в связности амплитуд колебаний на определенных частотах.
Известен датчик механических колебаний (Сперанский А.А. и др. «Датчик механических колебаний», патент RU 2382990 С1, МПК G01H 1/00, опубл. 27.02.2010, Бюл. №6). Датчик, включающий корпус с несколькими пьезокерамическими пластинами внутри, установленными консольно на стенках корпуса, отличающийся тем, что три пары пьезокерамических пластин расположены во взаимно перпендикулярных плоскостях, при этом пластины каждой из пар установлены консольно с противоположных сторон симметрично относительно плоскостей расположения других пар. Данный датчик позволяет провести локальное измерение одновременно шести компонентов параметров волнового механического поля. Вместе с тем, датчик определяет только локальные динамические особенности объекта и не позволяет непосредственно охарактеризовать динамические особенности движения контролируемого объекта в виде твердого тела на основе оценки частоты с учетом связности амплитуд колебания точек объекта. Так, в случае установки датчика в узел колебания - точку с нулевой амплитудой колебания, датчик зарегистрирует нулевые или критически малые амплитуды вертикального колебания.
В качестве прототипа устройства взят датчик вибраций и перемещений (Фадеев А.Н., Моисеев И.Ф. «Датчик вибраций и перемещений» RU 2396524 С1, МПК G01H 3/00, G01H 9/00, опубл. 10.08.2010, Бюл. №22). Датчик содержит цилиндрический корпус, жестко связанный нижним основанием с поверхностью контролируемого объекта, и цилиндрический инерционный элемент, соосно расположенный в прозрачном корпусе. Изобретение относится к измерительной технике и может быть использовано для измерения и регистрации механических колебаний различных объектов. Вместе с тем, датчик вибраций и перемещений предоставляет информацию только о локальных динамических свойствах технического объекта, находящегося в условиях вибрационного нагружения и не предоставляет сведений о связности колебаний в различных точках объекта, рассматриваемого как твердое тело.
В качестве прототипа способа взят способ определения добротности механической колебательной системы (Соломин Б.А., Низаметдинов A.M. «Способ определения добротности механической колебательной системы», RU 2624411 С1, МПК G01H 1/00, опубл. 03.07.2017, Бюл. №19). Изобретение относится к метрологии, в частности, к способам оценки динамических состояний механической колебательной системы, в частности, измерению добротности. Представленный способ, ориентированный на оценку частной характеристики динамического состояния механической колебательной системы с одной степенью свободы, отображает только локальные свойства объекта в условиях вибрационного нагружения и не отображает связность амплитуд колебания в различных точках.
Цель предлагаемого изобретения заключается в разработке механического устройства и способа для оценки существенных характеристик динамического состояния в виде распределения амплитуд и частоты вынужденных колебаний точек контролируемого объекта, рассматриваемого как твердое тело.
Задача решается тем, что предложены способ и устройство, позволяющие зарегистрировать специальные параметры колебаний и по формулам, использующим зарегистрированные параметры, определить существенные характеристики динамического состояния в виде связности и частоты колебаний.
Устройство образовано прозрачным корпусом, инерционным элементом в виде твердотельного стержня с нанесенной в виде делений системой координат с началом в центре тяжести, упругих элементов, крепежей, направляющих и роликов. Масса инерционного элемента незначительна по сравнению с массой контролируемого объекта.
В процессе установившихся колебаний объекта на фиксированной частоте инерционное тело в виде стержня на упругих элементах совершает вынужденные периодические движения. При определенных условиях реализуется динамический эффект формирования узла колебания инерционного тела, проявляющийся в том, что в определенной точке инерционного тела амплитуда колебания равна нулю, либо незначительна по сравнению с амплитудами колебаний концевых точек. На основе, экспериментально определенной координаты узла колебаний и, определенных с помощью вибромаркеров, амплитуд колебаний трех контрольных точек, определяются связность и частота колебаний контролируемого объекта по аналитическим формулам.
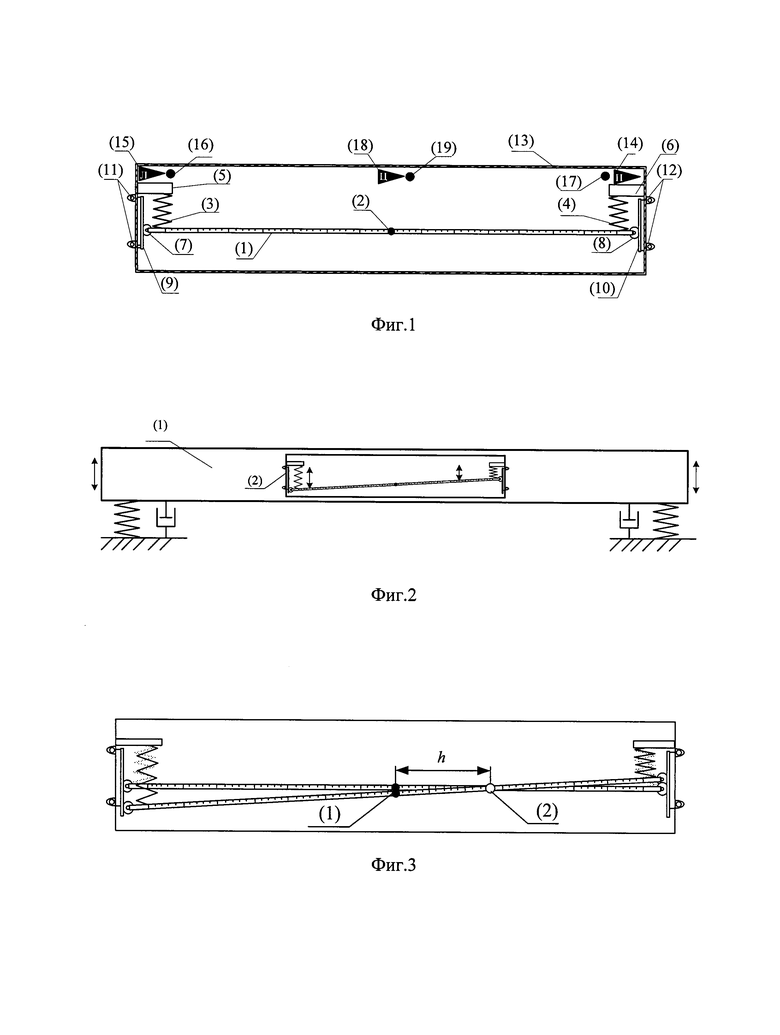
Описание устройства
На фиг. 1 представлена схема устройства, которое образовано прозрачным корпусом (13) с крепежами (11), (12), содержащим инерционный элемент в виде рычага (1) с отмеченным центром тяжести (2) и разметкой координатной системы в виде вещественной оси, деления которой отображают длину, с началом координат в центре тяжести. Инерционный элемент (1) прикреплен с помощью пружин (3), (4) к кронштейнам (5), (6), жестко соединенным с корпусом (13), на котором в левой (16), центральной (19) и правой (17) контрольных точках нанесены левый (15), центральный (18) и правый (14) вибромаркеры [1, 2]. На концах инерционного элемента (1) установлены ролики (7), (8), ободы которых вставлены в пазы вертикальных ограничителей (9), (10), соединенных с корпусом (13).
На фиг. 2 показан пример установки устройства (2) на контролируемый объект (1), находящийся в условиях вибрационного нагружения.
Изобретение работает следующим образом.
Описание способа оценки динамических состояний
В процессе колебания контролируемого объекта с помощью вибромаркеров в точках крепления упругих элементов к кронштейнам и в средней точке определяются положительные значения амплитуд колебаний.
Под действием установившихся колебаний контролируемого объекта инерционный элемент, закрепленный на пружинах, совершает установившиеся колебания относительно положения статического равновесия (фиг. 3). В зависимости от частоты установившихся колебаний контролируемого объекта в определенной точке инерционного элемента формируется узел колебаний, представляющий собой точку (2) с нулевой амплитудой колебания. На основе, нанесенной по всей длине инерционного элемента, координатной шкалы в единицах длины с началом в центре тяжести (1) определяется координата h узла колебания.
В режиме установившихся колебаний на основе вибромаркеров в левой, центральной и правой контрольных точках определяются значения амплитуд zl, zc, zr, представляющие собой неотрицательный величины. На основе значений zl, zc, zr, определяется безразмерный коэффициент связности γ:
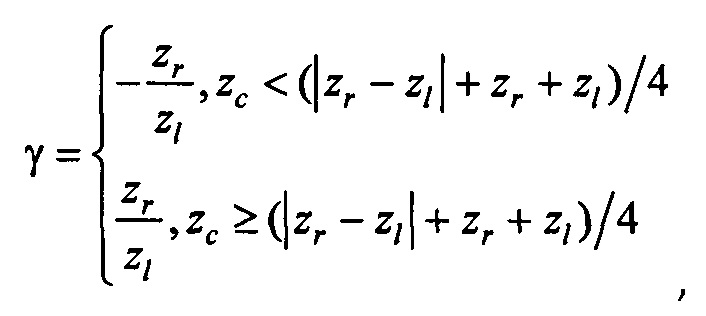
который может принимать отрицательные, нулевой и положительные значения.
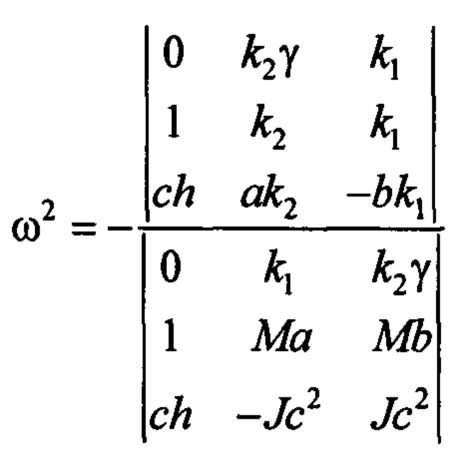
На основе рассчитанного коэффициента связности γ и экспериментально определенной координаты h точки (фиг. 3, 1), в которой реализуется узел колебания, частота ω колебаний объекта, как твердого тела, определяется по формуле:
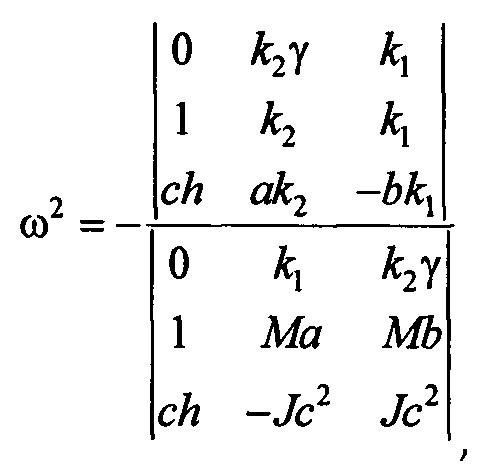
где M, J - масса и момент инерции инерционного элемента, k1, k2 - жесткости упругих элементов,  - приведенные параметры системы,
- приведенные параметры системы,  ,
,  - расстояние от цента тяжести инерционного элемента до точек крепления пружин. Полагается, что масса инерционного тела незначительна по отношению к массе контролируемого объекта.
- расстояние от цента тяжести инерционного элемента до точек крепления пружин. Полагается, что масса инерционного тела незначительна по отношению к массе контролируемого объекта.
Приведенная формула устанавливает зависимость частоты установившихся колебаний от связности амплитуд колебаний точек объекта и координаты узла колебаний инерционного элемента. Математическое соотношение, отображающее связь между формами колебаний инерционного тела и динамическими характеристиками объекта, по существу, является алгоритмической основой подбора параметров устройства, которое необходимо для определения динамического состояния контролируемого объекта как твердого тела.
Список используемой литературы
1. Ю.И. Иориш. Виброметрия, Изд. второе. - М.: Государственное научно-техническое издательство машиностроительной литературы, 1963. - 756 с.
2. Вибрации в технике. Том 5. Измерения и испытания. Под ред. Генкина М.Д. М.: Машиностроение, 1981. 496 с.
3. Елисеев С.В. Динамический синтез в обобщенных задачах виброзащиты и виброизоляции технических объектов / С.В. Елисеев, Ю.И. Резник, А.П. Хоменко, А.А. Засядко. - Иркутск: ИГУ, 2008. 523 с.
4. Лурье А.И. Операционное исчисление и его приложения к задачам механики / А.И. Лурье. - Москва; Ленинград: Гос. изд-во техн.-теорет. лит., 1950. - 432 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления динамическим состоянием вибрационной технологической машины | 2019 |
|
RU2734839C1 |
| Способ управления формированием структуры и параметров вибрационного поля технологической машины | 2018 |
|
RU2691646C1 |
| Способ управления динамическим состоянием технического объекта при вибрационных воздействиях и устройство для его осуществления | 2018 |
|
RU2696506C1 |
| Способ настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2718177C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ СОСТОЯНИЕМ ВИБРАЦИОННОЙ ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ | 2017 |
|
RU2693711C2 |
| Способ управления динамическим состоянием технологической вибрационной машины и устройство для его осуществления | 2018 |
|
RU2711832C1 |
| Способ формирования, настройки и корректировки динамического состояния рабочих органов технологических вибрационных машин на основе введения дополнительных упругих связей и устройство для его реализации | 2019 |
|
RU2749364C2 |
| Способ изменения и настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2710314C1 |
| Устройство управления динамическим состоянием вибрационной технологической машины | 2020 |
|
RU2751169C1 |
| Устройство управления динамическим состоянием вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2755534C1 |
Изобретение относится к области виброметрии и может быть использовано для первичной оценки динамических состояний рабочих органов вибрационных технологических машин. Устройство и способ заключается в том, что на объект закрепляют измерительное устройство для оценки динамического состояния. Устройство образовано прозрачным корпусом с внешними креплениями, двумя внутренними кронштейнами, к которым на упругих элементах подвешен твердотельный инерционный элемент с нанесенной по его длине системой координат с началом в центре тяжести, концы которого снабжены роликами, с ободами, находящимися внутри направляющих, обеспечивающих вертикальные движения и тремя вибромаркерами, расположенными в точках крепления упругих элементов к кронштейнам и в их средней точке. В процессе колебаний контролируемого объекта инерционный элемент совершает вынужденные установившиеся колебания под действием кинематических возмущений со стороны кронштейнов, закрепленных на корпусе. При определенных динамических условиях на инерционном элементе возникает узел колебаний - точка, амплитуда колебаний которой равна нулю или существенно меньше амплитуд колебаний концевых точек. На основе экспериментально установленной координаты узла колебаний, расположенного на инерционном элементе, и амплитуд колебаний трех контрольных точек, в которых расположены вибромаркеры, с помощью формул определяется связность и частота вынужденных колебаний контролируемого объекта. Технический результат заключается в упрощении конструкции, и возможности оценки динамического состояния контролируемого объекта, и определения существенных характеристик в виде коэффициента связности и частоты колебаний. 2 н.п. ф-лы, 3 ил. 
1. Устройство для оценки динамических состояний рабочих органов вибрационных технологических машин образовано прозрачным корпусом, жестко соединенным с поверхностью контролируемого объекта, содержащее инерционный элемент, отличающееся тем, что инерционный элемент в виде твердотельного рычага подвешен на упругих элементах к двум кронштейнам, закрепленных на корпусе, и имеющего на концах ролики, установленные в направляющие пазы, обеспечивающие движение только в вертикальной плоскости, имеющего отмеченный точкой центр тяжести и шкалу длины с началом в центре тяжести с отметками по обе стороны от центра тяжести; на корпусе в точках крепления упругих элементов к кронштейнам и в средней точке между кронштейнами расположены вибромаркеры.
2. Способ для оценки динамических состояний рабочих органов вибрационных технологических машин по п. 1, характеризующийся тем, что включает регистрацию амплитуд колебаний zl, zc, zr в точках крепления упругих элементов и в средней точке между кронштейнами с помощью вибромаркеров в условиях установившихся колебаний инерционного элемента, вызванных кинематическим возмущением со стороны кронштейнов, определяют координату h точки с нулевой амплитудой на теле инерционного элемента с помощью шкалы и определяют частоту вынужденных колебаний по формуле:
где M, J - масса и момент инерции инерционного тела, k1, k2 - жесткости упругих элементов,  - геометрические параметры инерционного элемента, l1, l2 - расстояние от центра тяжести инерционного тела до точек крепления упругих элементов, а коэффициент связности γ определяется по формуле:
- геометрические параметры инерционного элемента, l1, l2 - расстояние от центра тяжести инерционного тела до точек крепления упругих элементов, а коэффициент связности γ определяется по формуле:
| ДАТЧИК ВИБРАЦИЙ И ПЕРЕМЕЩЕНИЙ | 2009 |
|
RU2396524C1 |
| Способ определения добротности механической колебательной системы | 2016 |
|
RU2624411C1 |
| ДАТЧИК МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2008 |
|
RU2382990C1 |
| 0 |
|
SU149707A1 | |
| US 8720272 B2, 13.05.2014 | |||
| Устройство управления динамическим состоянием вибрационной технологической машины | 2020 |
|
RU2751169C1 |
