
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления рабочим органом бульдозера | 1980 |
|
SU941503A1 |
| Устройство для управления рабочим органом землеройно-транспортной машины | 1980 |
|
SU910958A1 |
| Устройство для управления рабочим органом бульдозера | 1980 |
|
SU953838A1 |
| Устройство для управления процессом копания бульдозером | 1981 |
|
SU1048877A1 |
| Устройство для управления рабочим органом землеройно-транспортной машины | 1983 |
|
SU1102869A1 |
| Устройство для управления рабочим органом землеройно-транспортной машины | 1982 |
|
SU1082914A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 1981 |
|
RU1055199C |
| Способ управления рабочим органом землеройно-транспортной машины и устройство для его осуществления | 1983 |
|
SU1131981A1 |
| Устройство для программного регулирования глубины копания бульдозера | 1979 |
|
SU967138A2 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1985 |
|
SU1320349A1 |



1. УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ БУЛЬДОЗЕРА, содержащее датчик и задатчик тягового усилия, соединенные с первыми элементами сравнения, второй и третий элементы сравнения, каскады выглубления и заглубления отвала, логический блок, инвертор, две уставки порога срабатывания и два усилителя, отличающееся тем, что, с целью повышения надежности управления и динамического качества устройства, оно снабжено двумя лoгичecки ш блоками коррекции с командными реле. Причем входы блоков коррекции соединены с выходами второго и третьего элементов сравнения и через контакты командных реле - с усилителями.
СО vj
Об Од
to
Известно устройство для управления рабочим органом бульдозера, содержащее исполнительную часть, включающую гидравлические узлы и рабочий орган, и управляющую часть,включающую два контура управления для реализации заданного постоянного усилия контур, реализующий оптимальный закон изменения глубины копания, и контур, компенсирующий помеху по тяговому усилию путем автоматического изменения угла резания. Основными элементами являются каскады выглубления и заглубления отвала, датчик и задатчик тягового усилия, три сравнивающих элемента, логический .блок, . инвертор, две уставки порога срабатывания, два усилителя. Исполнительные элементы и элементы управления взаимосвязаны друг с другом J.
Такое устройство недостаточно надежно и устойчиво в работе, что влечет за собой снижение производительности. Это уменьшает эффективность комбинированного управления процессом копания.
Цейью изобретения является повышение надежности управления и динамического качества устройства«
Поставленная цель достигается тем, что устройство для управления рабочим органом бульдозера, содержащее датчик и задатчик тягового усилия, соединенные с первыми элементами сравнения, второй и третий элементы сравнения, каскады выглубления и заглубления отвала, логический блок, инвертор, две
дам логического элемента, вход которого через замыкающий контакт реле с регулируемой задержкой соединен с выходом элемента сравнения, к одному из входов которого подключен нели- i нейный регулируемый элемент, а другой вход и вход реле с регулируемой задержкой соединены между собой и являются входом блока коррекции.
уставки . порога срабатывания и два усилителя, снабжено двумя блоками коррекции с командными реле. Входы блоков коррекции соединены с выходами
второго и третьего элементов сравнения и через контакты командных усилителями. При этом каждый блок коррекции содержит реле с регулируемой задержкой, нелинейный регулируемый
элемент, элемент сравнения, логический элемент и сигнальный элемент, который подключен к выходу одного из командных реле. Входы обоих командных реле подключены к выходам логического
элемента, вход которого через замыкающий контакт реле с регулируемой задержкой соединен с выходом элемента срав,нения, к одному из входов которого подключен нелинейный регулируемьй элемент, а другой вход и вход реле с регулируемой задержкой соединены между собой и Являются входом блока коррекции.
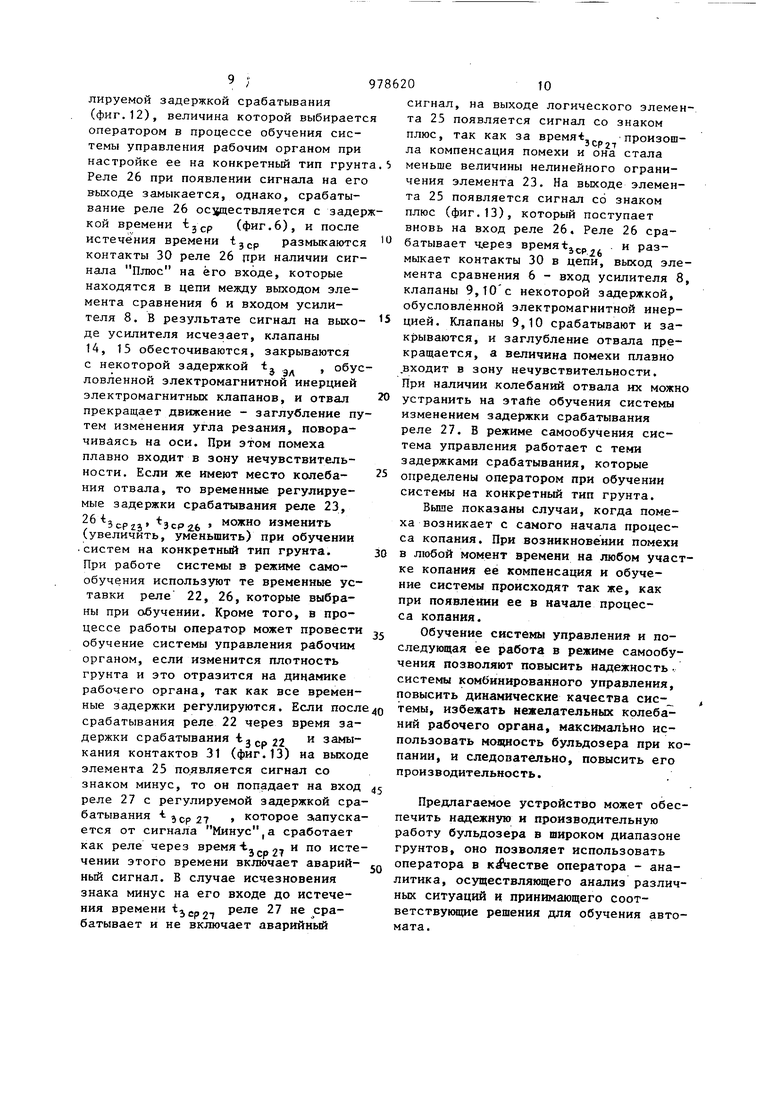
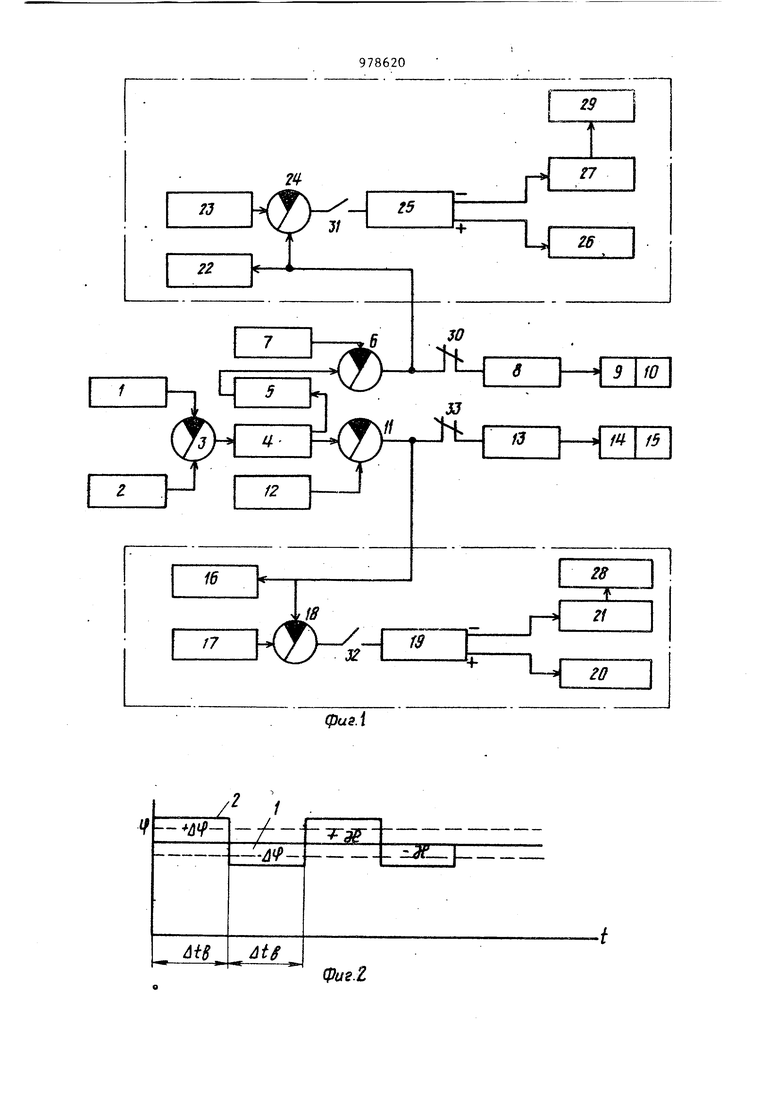
На фиг.1 приведена функциональная схема устройстваi на фиг.2 - кривые
закона изменения tf eonsi , тягового усилия помехи и зоны нечувствительности i U , на фиг.З - кривые оптимального закона изменения глубиныj на фиг.4 - кривая зависимости изменения
глубины копания при изменении угла резания с целью компенсации помехи, на фиг.З - кривые оптимального закона изменения глубины с учетом компенсации помехи по тяговому усилию; на фиг.6 кривые, характеризующие нелинейные ограничения помехи.
Устройство содержит несколько групп элементов, обеспечивающих работу контура по компенсации помехи на принципе .
комбинированного управления, а также группы элементов, обеспечивающих обучение системы комбинированного управления и последующую ее работу в режи ме самообучения. Первая группа (фиг.1) состоит из соединенных между собой тензодатчика 1, установленного на толкающем брусе задатчика 2 тягового усилия, первого элемента сравнения 3, логиче кого блока 4 с двумя выходами (плюс, минус). Вторая группа состоит из соединен ных между собой инвертора 5, второго элемента сравнения 6, блока 7 уставки порога срабатывания, усилителя 8 и пары электромагнитных клапанов 9, 10 каскада выглубления отвала. Вход инвертора 5 соединен с минусовым выходом логического блока 4, а усилитель 8 - с электромагнитными клапанами 9,10. Третья группа состоит из соединенных между собой третьего элемента сравнения 11, блока 12 уставки порог срабатывания, усилителя 13 и пары электромагнитных клапанов 14, 15 кас када заглубления отвала. Плюсовой выход логического блока 4 соединен с входом элемента сравнения 11, а выхо усилителя 13 - с электромагнитными клапанами t4,15. Четвертая группа состоит из перво го блока коррекции, включающего соед ненные между собой реле 16 с регулируемой задержкой срабатывания, нелинейный регулируемый элемент 17 и эле мент сравнения 18. Реле 16 с регулируемой задержкой срабатывания и эл мент сравнения 18 соединены с выходо элемента сравнения 11. В эту группу также входят логический элемент 19 с двумя выходами (плюс, минус), командные реле 20 и 21 с регулируемой задержкой срабатьгеания. Реле 20 соед нено с плюсом логического элемента 1 и имеет нормально замкнутые контакты цепи между выходом элемента сравнения 11 и входом усилителя 13, реле 21 соединено с минусом логического элемента 19, реле 16 имеет нормально разомкнутые контакты в цепи между выходом элемента сравнения 18 и входом логического элемента 19. Пятая группа состоит из соединенных междусобой реле 22 с регулируемой задержкой срабатывания, нелинейного регулируемого элемента 23, элемента сравнения 24. Элемент сравнения 24 и реле 22 соединены электрически с выходом элемента сравнения В группу вход21тлогический элемент 25 с двумя выходами (плюс, минус), командные реле 26 и 27 с регулируемой задержкой срабатывания. Командные реле 21 и 27 соединены соответственно с сигнальными блоками 28 и 29. Реле 26 соединено с плюсом логического элемента 25 и имеет размыкающие контакты 30 в цепи между выходом элемента сравнения 6 и входом усилителя 8, реле 27 соединено с минусом логического элемента 25, реле 22 имеет замыкакнцие контакты 31 в цепи между выходом элемента сравнения 24 и входом логического элемента 25. Реле 16 имеет замыкающие контакты 32 в цепи между выходом элемента сравнения 18 и входом логического элемента 19, а реле 20 - размыкакяцие контакты 33 в цепи между элементом сравнения 11 и логическим элементом 13. На фиг.7-9 показаны графики,х рактеризующие регулируемые задержки срабатывания реле 16и17, 20и21, 26 и 27 соответственно-, на фиг. 10 изображены кривые компенсируемой помехи и его ограничение сверху для случая, когда работают реле 16,20 с регулируемшли задержками сраба 3 Ср 26 тывания Ц рр фиг.11 - то же. для случая, когда работают реле 16, 20, 21 с регулируемыми задержками срабатывания ij , -tjcP o Ьср 2 / - °« нечувствительности); на фиг.12 изображены кривые компенсируемой помехи и ее ограничения снизу для случая, когда работают реле 22 и 26 с регулируемыми задержками срабатывания -Ьзсрга Jcpib ° чувствительности J на фиг.13 - то же, для случая, когда работают реле 22, 26, 27 с регулируемыми задержками срабатывания-i J Зср 22 зср24 Цсо зона .нечувствительности) . - зона нечуг Устройство работает следуюсцим образом. Одновременно с реализацией оптимального закона выглубления (кривая 2, фиг.З) задатчик 2 тягового усилия задает оптимальную постоянную величину тягового усилия, а датчик 1 изменяет его фактическую величину. Если происходит увеличение i тягового усилия вьше заданного задатчиком 2 на определенную ( иэм- ЯА 0) величину (фиг.2), 59 тона выходе элемента сравнения 3 появляется сигнал рассогласования со знаком плюс, который подается на вход логического блока 4 с двумя выходами по знаку сигнала рассогласования (плюс, минус). С выхода блока 4 со знаком плюс сигнал подается на вход элемента сравнения 11, на котором происходит сравнение сигнала рассогласования с уставкой 12 порога срабатывания клапанов 14,,15. При превышении сигналом рассогласования величины уставки 12 порога срабатывания на выходе элемента сравнения 11 о „ появляется сигнал, который подается на вход усилителя 13, ас его выхода - на клапаны ,14,15, Отвал, поворачиваясь относительно конца толкающего бруса, выглубляется на некоторую величину л11 (фиг.4). После выглубления отвала на величину /Ifi ко пание происходит с уменьшенной глубиной и постоянным тяговым усилием бла годаря тому, что помеха по тяговому усилию (фиг. 2) скомпенсирована путем выглубления отвала за счет изменения угла резания поворотом отвала. При этом выглубление отвала за счет его поворота путем изменения уг ла резания происходит до тех пор, по ка сигнал со знаком плюс на входе элемента сравнения 11 не сравняется по величине с уставкой порога срабатывания 12 группы клапанов 14, 15, а сигнал на выходе элемента сравнени будет равен нуЛю. Когда момент дости гается, на выходе усилителя 13 сигнал также становится равен нулю, кла паны 14, 15 закрываются, и выглубление отвала прекращается. Если происходит снижение тягового усилия ниж заданного задатчиком 2 на определенную величину (фиг. 2), то на входе логического блока 4 появляется сигнал рассогласования со знаком минус, который с выхода блока 4 со знаком минус подается на вход инвертора 5, а с его выхода со знаком плюс - на элемент сравнения 6, на ко тором сравнивается с уставкой порога 7 срабатывания клапанов 9,10. Если сигнал с выхода инвертора 5 пре высит сигнал уставки 7, на выходе элемента сравнения 6 появляется сигнал, который подается на вход усилителя 8, а с его выхода - на клапаны 9, 10. Клапаны 9, 10 открываются, при этом одновременно масло по0ступает в надпоршневую полость си.1;ового цилиндра, отвал, поворачиваясь относительно конца толкающего бруса, заглубляется. Заглубление отвала происходит до тех пор, пока сигнал со знаком плюс на входе элемента сравнения 6 не сравняется с уставкой 7 порога срабатывания клапанов 9, 10, а сигнал на выходе элемента сравнения 6 будет равен нулю. Когда этот момент достигается, сигнал на выходе усилителя 8 также становится равным нулю, клапаны 9, 10 закрываются, и заглубление отвала прекращается. При этом отклонение величины тягового усилия равно -4V , а заглубление происходит на некоторую .величину + uh (фиг.4). В результате происходит реализация оптимального закона выглубления отвала на всем участке копания по кривой 3 (фиг.5), отклоняющейся от кривой выглубления 2 при идеальном грунте на некоторую величину fiuh . В режиме самообучения возможны два случая. В первом случае помеха растет, она появляется на выходе логического блока 4 со знаком плюс, на выходе элемента сравнения 11 через усилитель 13 поступает на клапаны 14, 15 которые срабатывают,и начинаются выглубления отвала-компенсация помехи. Одновременно помеха после элемента сравнения 11 поступает на вход реле 16 с регулируемой задержкой срабатывания-t.p и на вход элемента сравнения 18. Помеха,несмотря на компенсацию ,растет. Через время tj задержки срабатывания реле 16, выбранное при обучении системы, срабатьшает и замкнет свои замыкающие контакты 32 в цепи между выходом элемента сравнения 18 и входом логического элемента 19. В результате на вход логического элемента 19 поступает сигнал, равный разности сигналов, поступающих на элемент сравнения от нелинейного элемента 17 и с выхода элементов сравнения 11, причем нелинейный элемент запитывается не в момент замыкания контакта реле 16 (32), а в момент перевода ручки гидрораспределителя в положение подъема. В результате сигнал определенного знака появляется на выходе логического элемента 19. Тут возможны два варианта работы сис-о темы. Если на выходе элемента 19 (фиг.З) появляется сигнал со знаком плюс, то он поступает на вход реле 20 с регули руемой задержкой срабатывания (фиг.10 зср 20 при появлении на его входе сигнала со знаком плюс запускается в работу, однлко он срабатывает с задержкой t, ,-г, (фиг. 7), И после этого- размыкаются контакты 33 (фиг.З) в цепи выхода элемента сравнения 11. В результате сигнал на выходе усилителя исчезает, .клапаны 14 и 15 закрываются, выглубление путем изменения угла резания прекращается, и отвал плавно входит в зону нечувствительности. Во втором случае может случиться так, что по истечении времени задержки срабатывания реле 16 turn , происходит замыкание его контактов 32, сигнал появляется на выходе элемента 19 со знаком минус и на входе реле 21 с регулируемой задержкой срабатывания t; Зср2-( реле 21 происходит За время -t дальнейшая компенсация помехи. Если за время зср 21 появляется сигнал на выходе элемента 19 со знаком плюс, то реле срабатывает и включается звуковой сигнал аварийного выглубления. Если же сигнал плюс появится на выходе элемента 19 раньше, чем истечет время i ср Р ле 2, то от него запускается реле 20 которое срабатывает,задержкой времеи размыкает контакты 33, после чего прекращается компенсация помехи со знаком плюс (фиг.11). Во втором случае время компенсации увеличивается на время задержки срабатывания реле 20. Когда с входа логического блока 4 поступает сигнал помехи со знаком минус, которьй проходит через инвертор 5 и элемент сра нения 6, он сравнивается .с постоянно уставкой 7, поступает через усилитель 8 на группу клапанов 9, 10. Это означает, что Чизм ЭОА имеется недогрузка агрегата по тяговому усилию, присутствует помеха отрицательного знака, которая компенсирует ся путем заглубления отвала за счет изменения угла резания. Кроме того, сигнал помехи со знаком минус, инвер тированный инвертором 5, после элеме та сравнения 6 поступает на вход реле 22 с регулируемой задержкой срабатывания tj р и на вход элемента сравнения 2. При обучении системы управления для компе {сации помехи отрицательно знака, убывающей so времени, знак помехи определяется на выходе логического блока 5, а поскольку помеха инвертируется, то обучение системы осуществляется для ее инвертированного положительного значения. На фиг.6 12,13 помеха для случая показана отрицательной, так как это соответствует физической сути процесса. Последующая работа системы управления отвалом в режиме самообучения обеспечивается с помдщью реле 22, 27, 26 с регулируемой задержкой срабатывания, нелинейного регулируемого элемента 23, а также элемента сравнения 24, логического элемента 25 с двумя выходами (плюс, минус) и сигнального элемента 29. В этом случае система управления работает следующим образом. Растет помеха со знаком минус на выходе логического блока 4, и происходит ее компенсация с помощью устройства для комбинированного управления отвалом. При этом осуществляется заглубление отвала, и работают клапаны 9, 10. Одновременно после элемента сравнения 26 помеха поступает на вход реле 22 (фиг,13) и на вход элемента сравнения 24. Помеха отрицательного знака несмотря на компенсацию растет, так как она всегда должна достичь при компенсации какого-то максимума, а затем идти на убьшь. Через время задержки срабатывания реле 22, устанавливаемое оператором в процессе обучения системы управления на конкретный тип грунта, срабатывает реле 22 и замыкает контакты 31 между выходом элемента сравнения 24 и входом логического элемента 25. В результате на вход логического элемента 25 поступает сигнал, равный разности сигналов, подаваемых на элемент сравнения 24 с нелинейного регулируемого элемента 23 и с выхода элемента сравнения 6, причем величина нелинейного ограничения настраивается оператором на конкретный тип грунта. Нелинейный элемент 23 запитывается не в момент замыкания контакта 31 реле, ав момент перевода ручки гидрораспределителя. При этом сигнал определенного знака появляется на выходе логического элемента 25. Если на выходе элемента 25 появляется сигнал со знаком плюс, то он поступает на вход реле 26 с регу9 ; лируемой задержкой срабатывания (фиг.12), величина которой выбираетс оператором в процессе обучения системы управления рабочим органом при настройке ее на конкретный тип грунт Реле 26 при появлении сигнала на его выходе замыкается, однако, срабатывание реле 26 ос ществляется с задер кой времени (фиг.6), и после истечения времени размыкаются контакты 30 реле 26 при наличии сигнала Плюс на его входе, которые находятся в цепи между выходом элемента сравнения 6 и входом усилителя 8. В результате сигнал на вькоде усилителя исчезает, клапаны 14, 15 обесточиваются, закрываются с некоторой задержкой t , обус ловленной электромагнитной инерцией электромагнитных клапанов, и отвал прекращает движение - заглубление пу тем изменения угла резания, поворачивйясь на оси. При этом помеха плавно входит в зону нечувствительности. Если же имеют место колебания отвала, то временные регулируемые задержки срабатывания реле 23, 26 :эср25 ЗСР26 . можно изменить (увеличить, уменьшить) при обучении систем на конкретный тип грунта. При работе системы в режиме самообучения используют те временные уставки реле 22, 26, которые выбраны при обучении. Кроме того, в процессе работы оператор может провести обучение системы управления рабочим органом, если изменится плотность грунта и это отразится на динамике рабочего органа, так как все временные задержки регулируются. Если посл срабатывания реле 22 через время задержки срабатывания замыкания контактов 31 (фиг.13) на выход элемента 25 появляется сигнал со знаком минус, то он попадает на вход реле 27 с регулируемой задержкой сра батывания -t которое з,апуска ется от сигнала Минус,а сработает как реле через время Ч.. 27 исте чении этого времени включает аварийный сигнал. В случае исчезновения знака минус на его входе до истечения времени зер21 ® ,ЯР батывает и не включает аварийный 0 сигнал, на выходе логического элемента 25 появляется сигнал со знаком плюс, так как за время-,„ произошла компенсация помехи и она стала меньше величины нелинейного ограничения элемента 23. На выходе элемента 25 появляется сигнал со знаком плюс (фиг.13), который поступает вновь на вход реле 26, Реле 26 срабатывает через времяtj p . и размыкает контакты 30 в цепи, выход элемента сравнения 6 - вход усилителя 8, клапаны 9,10 с некоторой задержкой, обусловленной электромагнитной инерцией. Клапаны 9,10 срабатывают и закрываются, и заглубление отвала прекращается, а величина помехи плавно .входит в зону нечувствительности. При наличии колебаний отвала их можно устранить на этаЛе обучения системы изменением задержки срабатывания реле 27. В режиме самообучения система управления работает с теми задержками срабатывания, которые определены оператором при обучении системы на конкретный тип грунта. Вьппе показаны случаи, когда помеха возникает с самого начатта процесса копания. При возникновении помехи в любой момент времени на любом участке копания ее компенсация и обучение системы происходят так же, как при появлении ее в начале процесса копания. Обучение системы управления и последующая ее работа в режиме самообучения позволяют повысить надежность, системы комбинированного управления, повысить динамические качества системы, избежать нежелательных колебаний рабочего органа, максимально использовать MoapiocTb бульдозера при копании, и следопательно, повысить его производительность. Предлагаемое устройство может обеспечить надежную и производительную работу бульдозера в широком диапазоне грунтов, оно позволяет использовать оператора в кЛестве оператора - аналитика, осуществляющего анализ различных ситуаций и принимающего соответствующие решения для обучения автомата.
физЛ
h- V -- -/-4-T-3igr.Alf-
- -
t/
fg
(pusZ
JL I
AH
AiS
Ai$
JLJL
фиг Л
fpue.5
JT
i3.cf).16 it.fp.2(l
y////// $
qjt/fW
фиг. 12
Z
фиг Ъ
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ изготовления фотовольтаических элементов с использованием прекурсора для жидкофазного нанесения полупроводниковых слоев р-типа | 2018 |
|
RU2694118C1 |
