(5«) КУЛАЧКОВЫЙ КОНТРОЛЛЕР
| название | год | авторы | номер документа |
|---|---|---|---|
| Инклинометр | 1982 |
|
SU1102914A1 |
| УКАЗАТЕЛЬ ПОВОРОТА ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2021924C1 |
| Пороговый выключатель | 1978 |
|
SU736205A1 |
| Устройство для хранения и выдачи предметов | 2015 |
|
RU2614198C1 |
| Электромеханический тормоз | 1929 |
|
SU26342A1 |
| КОНТАКТОР ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2539263C2 |
| Устройство для дистанционного управления локомотивом | 1980 |
|
SU895773A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКИМ ЗАМКОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2780996C1 |
| КОНТАКТОР ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2011 |
|
RU2488907C2 |
| Электромагнитный коммутационный аппарат | 1986 |
|
SU1403140A1 |
. .
Изобретение относится к механическим системам управления, а именно к кулачковым контроллерам для управления электромеханическими системами.
Известен кулачковый контролер для управления электромеханической системой, содержащий вал с кулачковыми шайбами, подпружиненные рычаги с роликами и контактами, и электромагнит, якорь которого кинематически JQ связан с рычагами ,1 .
Известен также кулачковый контроллер , содержащий корпус, в котором усг тановлены электромагниты, вал с закрепленными на нем кулачковыми шайба- 5 ми, подпружиненные поворотные рычаги, каждый из которых снабжен роликом, контактирующим с соответствующей кулачковой шайбой и якорем, взаимодействующим с электромагнитом, 20 главные контакты, приводимые в действие поворотными рычагами Ц 2 J.
Недостатками известных контроллеров являются ограниченные функциональные возможности, например отсутствие возможности построения автоматической системы управления, и сравнительно невысокая надежность.
Целью изобретения является расширение функциональных возможностей контроллера и повышение надежности его работы.
Указанная цель достигается тем, что контроллер снабжен вспомогательными контактами, приводимыми в действие, поворотными рычагами, магнитопровод электромагнита выполнен П-образным, якоря смонтированы на поворотных рычагах с возможностью их самоустановки относительно полюсов элек-тронагнитов.
Вспомогательные контакты выполнены магнитоуправляемыми.
Вспомогалельные магнитоуправляемые кoнтaкtы установлены между полюсами электромагнитов.
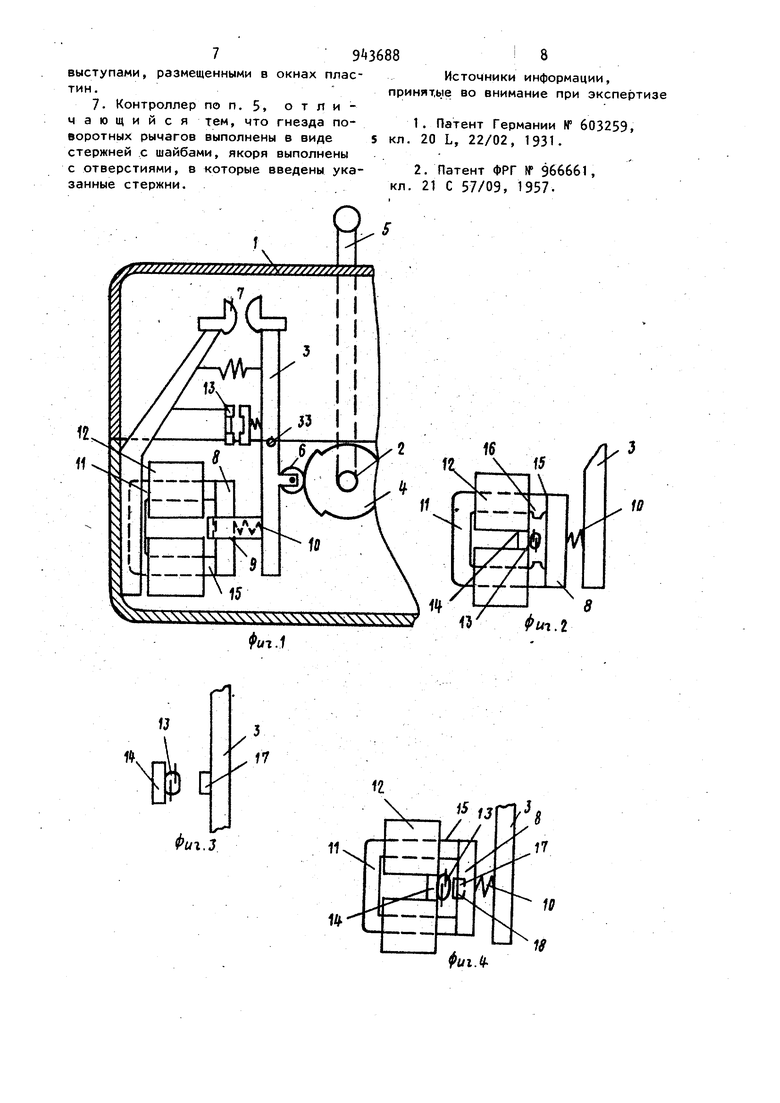
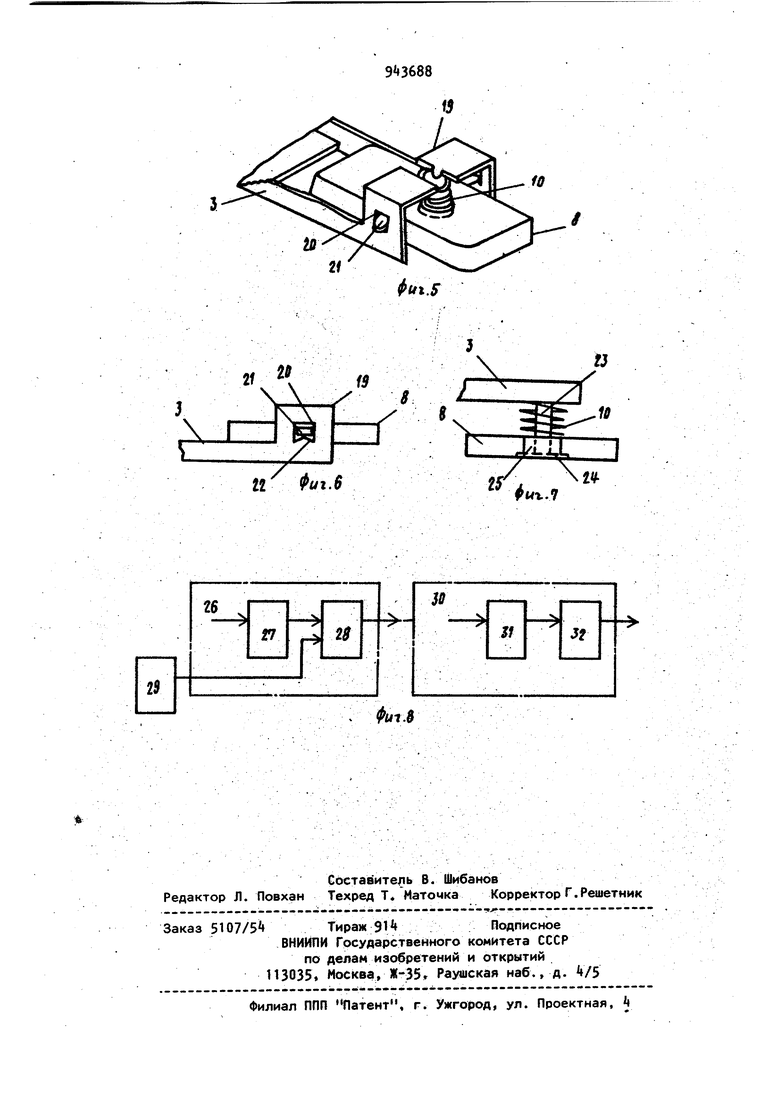
Контроллер может быть снабжен постоянными магнитами, связанными с поворотными рычагами, при этом магнитоуправляемые контакты размещены в -зоне действия поля постоянных магнитов Каждый поворотный рычаг контроллера выполнен с гнездом, в котором свободно установлен якорь, и снабжен пружиной, установленной между якорем и гнездом. Гнезда поворотных рычагов могут быть выполнены в виде Г-образных пластин с о.кнами, опорные поверхности которых выполнены цилиндрическими, Э якоря электромагнитов выполнены с выступами, размещенными в окнах пластин. В другом варианте гнезда поворотных рычагов выполнены в виде стержней с шайбами, якоря выполнены с отверстиями1В которые введены указанные стержни.. На фиг. 1 изображено устройство, общий вид; на фиг. 2 - диамагнитная планка,вид сверху; на фиг. 3 - расположение магнита и магнитоуправляемо го контакта, вариант; на фиг. t крепление магнита на якоре, вариант; на фиг. 5 крепление якоря, вариант на фиг. 6 - выполнение окна пластины вариант; на фиг. 7 крепление якоря второй вариант; на фиг. 8 - функциональная схема контроллера. Кулачковый контроллер для управле ния электромеханической системой содержит корпус 1, в котором установле ны вал 2 и поворотные подпружиненные рычаги 3. Кулачковые шайбы k установ лены на валу 2. Вал 2 снабжен рукоят кой 5. Ролики 6 расположены на рычаг 3 и сопряжены с шайбами k. Глазные контакты 7 смонтированы на рычагах 3 и в корпусе 1. Якоря 8 свободно расположены в гнездах 9, между якорями В и рычагами 3 установлены пружины 10, Варианты крепления якоря показаны на фиг. 1, 5 и 7. Магнитопровод 11 элек тромагнита выполнен Н-образным, на нем установлены катушки 12. Вспомогательные контакты 13 расположены у рычагов 3 (фиг. 1). Контакты 13 могут быть выполнены магнитоуправляемыми (фиг. 2-4). Контроллер может быть снабжен диамагнитной планкой 1-4 (фиг. 2-4), установленной в корпусе 1 между полосами 15 сердечника 11 Магнитоуправляемые контакты 13 закреплены между полюсами 15 сердечника 11, выполненного с наконечниками 16. Контроллер может быть снабжен магнитами 17 (фиг. 3), связанными с рычагами 3, причем планка И с магнитоуправляемым контактом расположена у зоны перемещения магнитов 17- Якори 8 выполнены с пазами 18 (фиг. i), в которых установлены магниты 17. Гнезда 9 выполнены, в виде Г-образных пластин 19 с окнами 20, а якоря 8 выполнены с выступами 21, установленными в окнах 20 (фиг. 5). Окна 20 выполнены с цилиндрической поверхностью 22 (фиг. 6). Гнезда 9 могут быть выполнены в виде стержней 23 с шайбамми 2k (фиг. 7). Якори 8 выполнены с отверстиями 2-5 и свободно надеты на стержни 22. Электрическая схема контроллера содержит контакт 26 нулевой кулачковой шайбу, связанный через реле времени 27 с блоком 28 управления катушкой (катуш ками первого электромагнита. Блок 28 может управляться также от реле 29 скольжения. Контакт 30 первой кулачковой шайбы через реле времени 3 связан с блоком 32 управления катушкой (катушками) второго электромагнита. В дальнейшем до последней кулачковой шайбы элементы и связи между ни ми аналогичны элементам к связям кулачковой шайбы. Поворотный рычаг 3 установлен на оси 33. Кулачковый контроллер предназначен для управления электромеханической системой, например электрическими цепями асинхронного двигателя. При повороте оператором рукоятки 5 на некоторый угол ролик 6 (ролики 6) рычйга 3 (рычагов 3) попадает -в вырез шайбы 4. Под действием пружины рычаг 3 должен повернуться против часовой стрелки, однако .поворот рычага 3 возможен лишь в случае обесточивания катушки 12 электромагнита, в противном случае электромагнит удерживает рычаг 3 и не дает ему повернуться. При обеСточивании катушки 12 рычаг 3 поворачивается и срабатывает контакт 13 (иа фиг. 1 контакт 13 замыкается), при этом, например при управлении системой в функции времени, контактом 13 подается сигнал на отсчет времени, после которого обесточивается катушка 12 уже следующего рычага 3, и так последовательно с выдержкой времени рычаги отпадают до некоторого рычага, соответствующего углу поворота рукоятки 5. Поскольку якорь 8 пйдпружинен, то при попадании ролика 6 на выступ шайбы k якорь 8 всегд плотно прижимается к сердечнику 11. Двухполосная система сердечника уменьшает рассеивание потока, что позволяет уменьшить габариты катушки (катушек) и расположить магнитоуправляемый контакт в непосредственной близости от электромагнита. Таким образом, контроллер позволяет надежно управлять, например, двигателем в функции времени. Выполнение контак та 13 магнитоуправляемым также повышает надежность контроллера. На фиг, 2 показано управление магнитоуправляемыми контактом 13с помощью части магнитного потока сердечника 11 при этом часть потока ответвляет ся с помощью наконечников 16, при - обесточивании катушки 12 срабатывает контакт 13, подавая команду на отсчет выдержки времени на катушку 12 следующего рычага 3- Управлять магнитоуправляемым. контактом можно с помощью магнита 17, расположенным на рычаге 3 или якоре 8. Возможность самоустановки якорь 8 имеет благодаря расположению его в Г-образных пластинах 19,окно 20 которых выполнено с цилиндрической поверх ностью 22,. Якорь 8 может быть расположен на стержне 23, причем диаметр стержня 23 меньше диаметра отверстия 25 в якоре 8. Контроллер управляет двигателем следующим образом. При переводе ручки 5 с нулевой по зиции на ходовую позицию размыкается контакт 26 нулевой кулачковой шайбы, с выдержкой времени подается сигнал на блок 28, и рычаг 3 первой кулачковой шайбы поворачивается под действием его пружины, замыкается главный контакт 7 и размыкается вспомогательный контакт 30 и с выдержкой времени подается сигнал на блок 32. Катущка (катушки) электромагнита второй кулачковой шайбы обесточивается, в результате замыкается его главный контакт и вспомогательный контакт. Ток продолжается до тех пор, пока не повернется рычаг, соответствующий положению рукоятки 5 причем электромагнит следующего рычага обесточится, но рычаг не повернется, так как против его ролика нет выреза в кулач козой иЗайбе. При реверсе питание блока 28 осуществляется от реле 29 сколь жения и замыкание глазных контактов становится возможным только после ррабатывания реле 29Кулачковый контроллер имеет высокую надежность и позволяет, например, осуществлять автоматический пуск и реверс. Формула изобретения 1.Кулачковый контроллер, содержащий корпус, в котором установлены электромагниты, вал с закрепленными на нем кулачковыми шайбами, подпружиненные поворотные рычаги, каждый из которых снабжен, роликом, контактирующим с соответствующей кулачковой шайбой, и якорем, взаимодействующим с соответствующим электромагнитом, главные контакты, приводимые в действие поворотными рычагами, отличающийся тем, что, с целью расширения функциональных возможностей и повышения надежности, он снабжен вспомогательными контактами, приводимыми в действие поворотными рычагами, магнитопроводы электромагнитов выполнены П-образными, якоря смонтированы на поворотных рычагах с возможностью их самоустановки относительно полюсов электромагнитов. 2.Контроллер по п. 1, о т л ичающийся тем, что вспомогательные контакты выполнены магнито- , управляемыми. 3.Контроллер по п. 2, отличающийся тем, что магнитоуправляемые контакты установлены Между полюсами электромагнитов. k. Контроллер по п. 2, о т л и ч а ю щ и и с я тем, что он снабжен постоянными магнитами, связанными с поворотными рычагами, причем магнитоуправляемые контакты размещены в зоне действия поля постоянных магнитов. 5.Контроллер по пп. 1-3, или t, . тличающийся тем, что аждый поворотный рычаг выполнен с нездом, вкотором свободно установен соответствующий якорь, и снабжен ружиной, установленной между якорем гнездом. 6.Контроллер по п. 5, отлиающийся Тем, что гнезда оворотных рычагов выполнены в виде -образных пластин с окнами, опорые поверхности которых выполнены илиндрическими, а якоря выполнены с
79 3688 8
выступами, размещенными в окнах пластин.
7- Контроллер по п, 5, о т я и чающийся тем, что гнезда по- 1. Патент Германии № 603259, воротных рычагов выполнены в виде 5 кл. 20 L, 22/02, 1931. стержней с шайбами, якоря выполнены .
с отверстиями, в которые введены ука- 2. Патент ФРГ № 966661, занные стержни., кл. 21 С 57/09, 1957Источники информации, принятые во внимание при экспертизе
/ X
1
G
Фиг.З
/
X
tr
/
9
2f
II фиг.6
