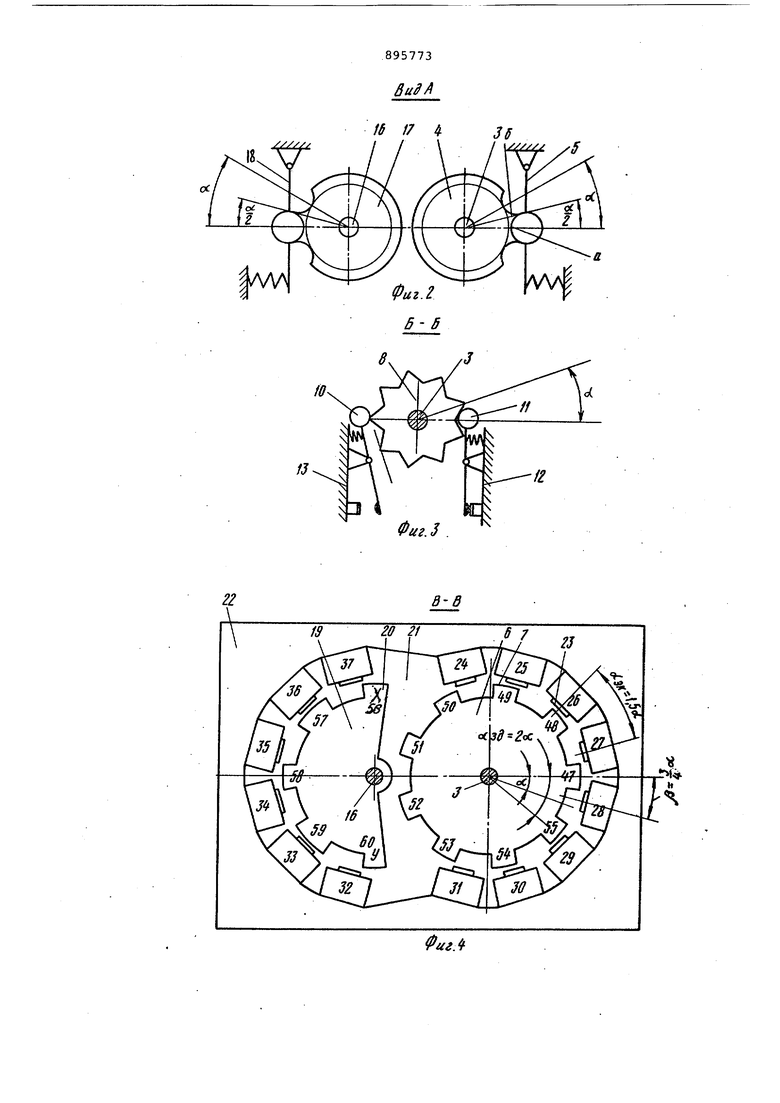
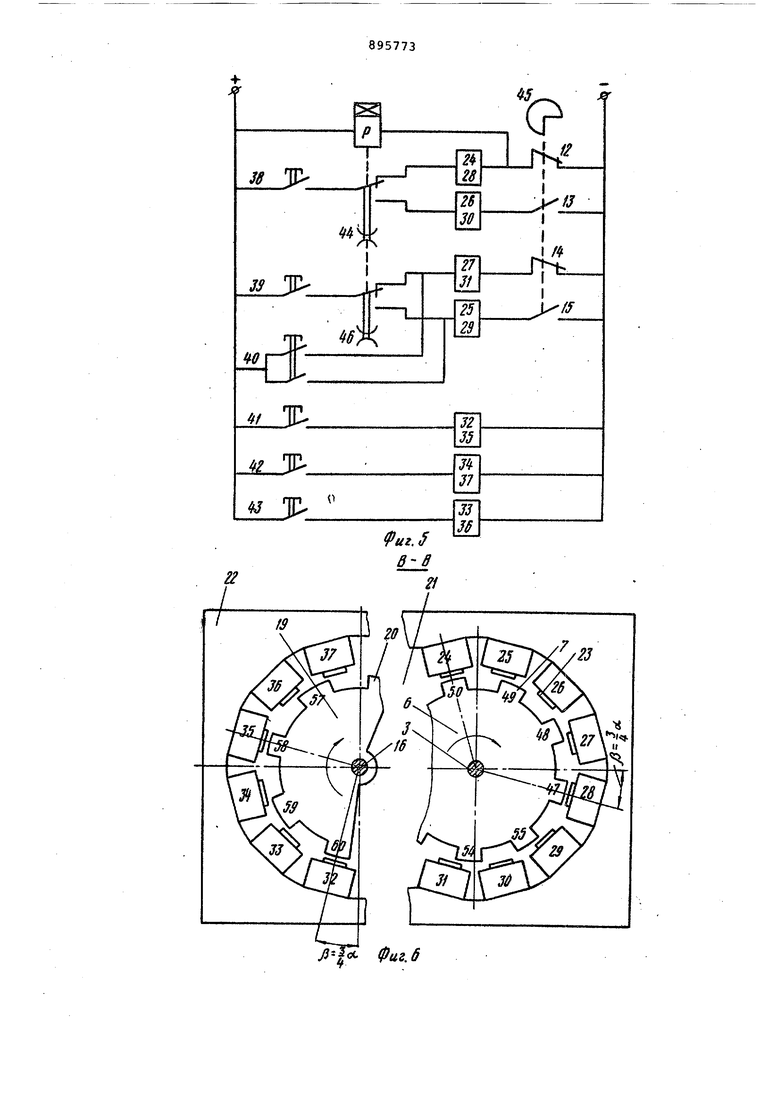
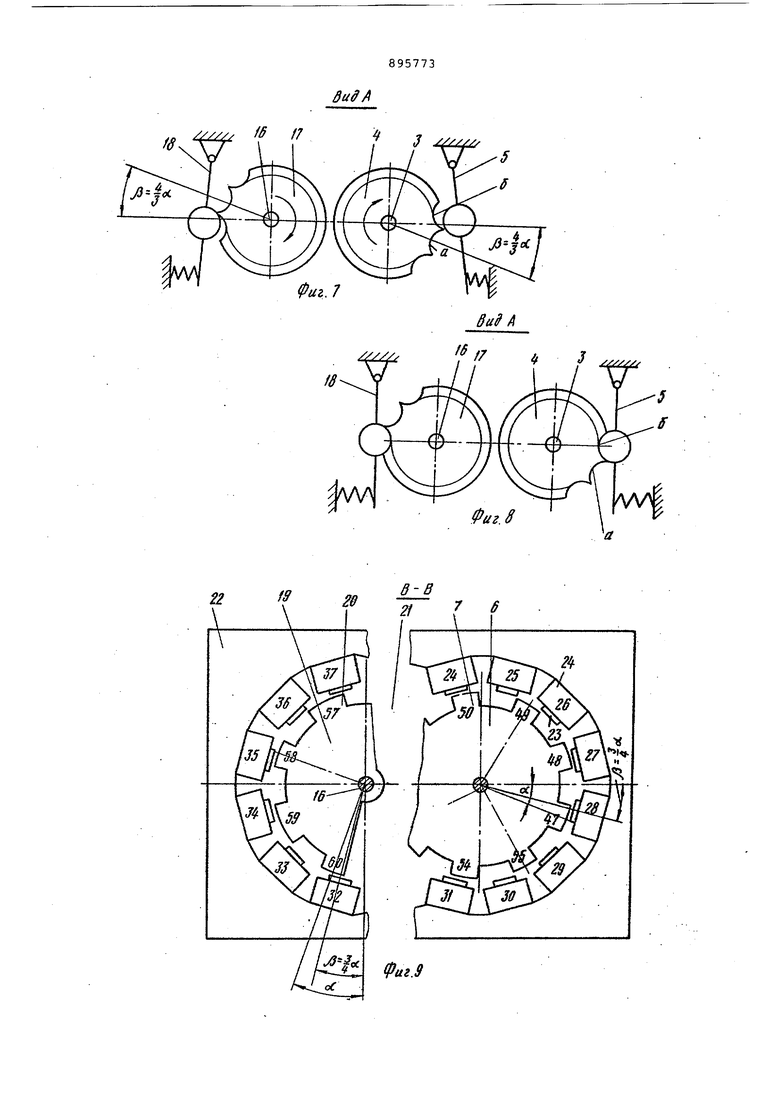
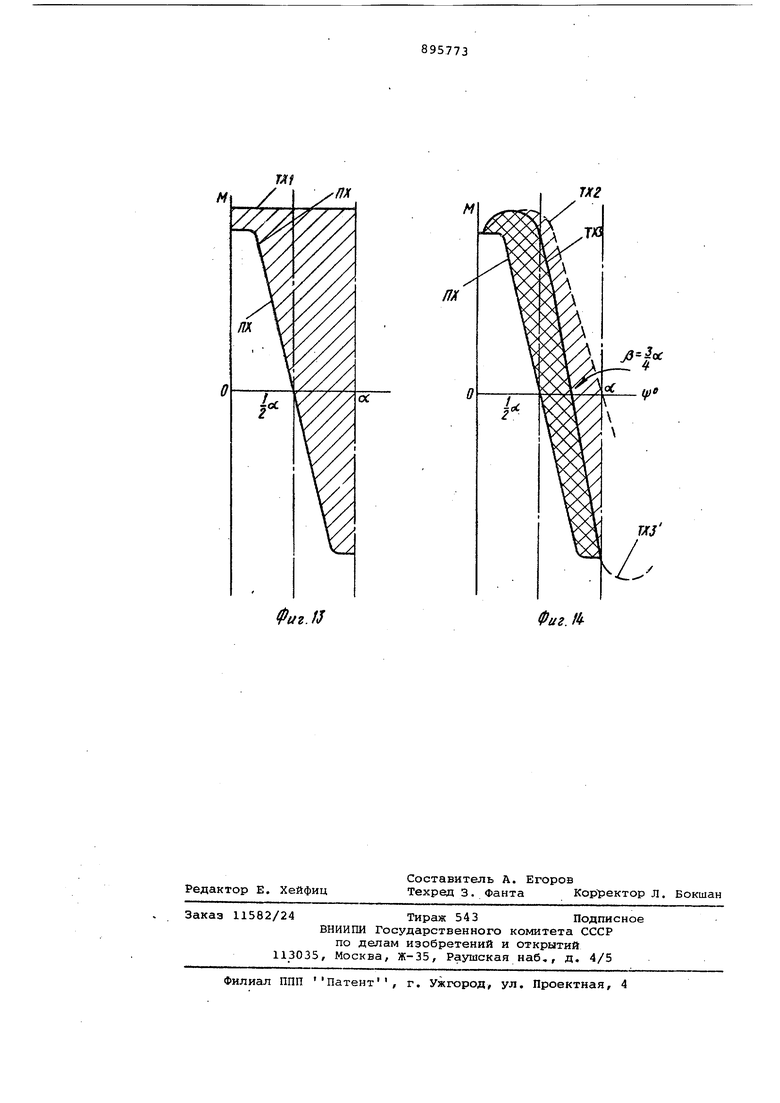
Изобретение относится к железнодорожному транспорту/ а именно к устройствам управления локомотивами. Известно устройство для дистанционного управления локомотивом/ содержащее соединенный с цепями управления последнего выносной пульт/ кон троллер с главным и реверсивными ва лами, связанными с механизмами поворота и фиксации/ и кулачковый барабан, а также блок быстрого сброса позиции контроллера 1. Однако это устройство имеет сложную кинематическую схему с большим количеством точек/ подвергающихся и тенсивному механическому износу/ что усугубляется плохим сочетанием тяго вой характеристики пневмопривода с противодействующей характеристикой фиксирующего механизма контроллера. Цель изобретения - повышение надежности и увеличение срока службы устройства. Для этого механизм поворота выполнен из установленных на поворотных валах контроллера ферромагнитных дисков с радиально расположенными зубцами и электромагнитов/ охватыва ющих диски и подключенных в электри чб;скую цепь пульта управления/ -а бл быстрого сброса позиций выполнен в виде установленных на главном валу контроллера кулачков/взаимодействующих с контактами/ включенными последовательно с обмотками электромагнитов механизма поворота/ при этом корпус последнего выполнен шихтованным и имеет зубцы/ являющиеся сердечниками электромагнитов. На фиг. 1 показано устройство дистанционного управления локомотивом, общий вид; на фиг. 2-фиксирукндие механизмы главного и реверсивного.валов контроллера/ нулевое положение; на фиг. 3 - кулачковая шайба и контакты контроллера/ нулевое положение; на фиг. 4 - привод валов контроллера, нулевое положение; на фиг. 5 - схемауправления устройства/ нулевое положение; на фиг. 6 - привод валов контроллера с промежуточным положением ферромагнитных дисков; на фиг. 7 фиксирующие механизмы главного и реверсивного валов контроллера с проме,жуточным положением храповиков; на фиг. 8 - то же, после переключения на одну позицию по часовой стрелке; на фиг. 9 - привод валов контроллера с положением ферромагнитных дисков, после переключения на одну позицию по часовой стрелке; на фиг. 10 кулачковая шайба и контакты контроллера, после переключения главного вала на одну позицию по часовой стре ке; на фиг. 11 - схема управления устройства, промежуточное положение (до переключения контактов реле); на фиг. 12 - то же, после переключения главного вала контроллера на одну позицию по часовой стрелке (после переключения контактов реле); на фиг. 13 - диаграмма работы устройств с пневм атическим приводом (прототипа) ; на фиг. 14 диаграмма работы устройства. Устройство содержит переносной пульт 1, электрически соединенный с цепями 2 управления локомотивом. На главном валу 3 контроллера закреплек храповик 4, фиксируемый подпружиненным рычагом 5.. На том же ва лу 3 закреплены ферромагнитный диск 6 с радиальными зубцами 7 и кулачко вые шайбы 8 и 9, находящиеся во вза имодействии с роликами 10 и 11 контактов 12,13,14,15. На реверсивном валу 16 закреплены храповик 17, фик сируемый подпружиненн тгм рычагом .18, и скошенный ферромагнитный диск 19 радиальными зубцами 20. Ферромагнитные диски б и 19 поме щены в одном овальном окне 21 корпуса 22. По периметру окна 21 разме щены сердечники 23 с обмотками 2437, которые электрически соединены между собой попарно 24-28, 26-30, 27-31, 25-29, 32-35, 34-37, 33-36. При этом соотношения между фиксированным углом о1Поворота вала, углом между зубцами 7 ферромагнитного дис ка 6 углом между осями электромагнитов корпуса 22 oig состав ляют: oiaa-(l,99 - 2,01) cl oL 9Kz(l,49 - 1,51) oL Причем,величина угла рСмежду осью зубца ферромагнитных дисков 6 и 19 и осью взаимодействующих с ним электромагнитов корпуса 22) составл ет 0, о«- . При этом угол oL практически може быть в пределах 5-30. В изобретении приняты соотношени приоС ., 1,5оС, |ct. Пульт управления 1, электрически соединенньЕй с цепью 2 управления ло комотивом, содержит кнопки 38-43 управления поворотом главного и реверсивного валов контроллера. Кнопка 38 электрически соединена с обмотками 24-28 и 26-30 электромагнитов через переключающий контакт 44 реле с вьадержкой времени при срабат вании и возврате. Последовательно с обмотками 24-28 электромагнита вклю чены контакты 12, а с 26-30 - конта ты 13, которыми управляют с помощью кулачков 45. Кнопка 39 электрически соединена с обмотками 27-31, 25-29 электромагнитов через переключающий контакт 46 реле. Последовательно с обмотками 27-31 электромагнита соединен контакт 14, а с 25-29 - контакт 15, которыми также управляют с помощью кулачков 45. Двухполюсная кнопка 40 электрически соединена непосредственно с обмотками 27-31, 25-29 электромагнитов, минуя контакт 46 реле. Кнопки 41,42 и 43. электрически соединены с обмотками 32-35, 34-37 и 33-36 электромагнитов соответственно. Устройство работает следующим образом. Переключение главного вала 3 на одну позицию по часовой стрелке осуществляют нажатием кнопки 38. При этом питание через замкнутый контакт 44 реле с выдержкой времени и замкнутый контакт 12 подают на обмотки 24-28 электромагнитов корпуса 22. Между сердечниками э.лектромагнитов и зубцами 47-60 ферромагнитного диска 6 возникает магнитодвижущая сила, направленная по касательной к ферромагнитному диску в направлении сближения зубцов диска с сердечниками. Таким Образом, ферромагнитный диск 6, преодолев момент сопротивления, создаваемый подпружиненным рычагом 5, поворачивается по часовой стрелке, т.е. из положения, показанного на фиг. 4, в положение,. показанное на фиг. 9. Так как ферромагнитный диск 6 и храповик 4 жестко закреплены на общем валу 3, то храповик 4 поворачивается по часовой стрелке на угол ai / т.е. ролик .рычага 5 из лунки а храповика 4 переходит в лунку б. Кулачковая шайба 8 тоже поворачивается на угол oi по часовой стрелке, т.е. ИЗ положения, показанного на фиг. 3, - в положение, показанное на фиг. 10; йри этом за счет воздействия на ролики 10 и Г1 контакты 12,13,14,15 переключаются и схема управления переходит из состояния, показанного на фиг. 5, в положение, показанное на фиг. 11, т.е. контакт 12 раз-мыкает цепь питания обмоток 24-25. Одновременно размыкается цепь питания реле, выдержки времени, но его контакты 44 и 46 некоторое время остаются в прежнем положении, т.е. как показано на фиг. 5 и 11. Таким образом, даже при нажатой кропке 38 цепи питания обмоток 24-28, .и 26-30 некоторое время (время/вьщержки реле) остаются разомкнутыми. При отпускании кнопки 38 схема управления переходит :в состояние, показанное на фиг. 12. Для поворота вала 3 на угол odпо часовой стрелке нажимают кнопку 38. При этом питание через контакты 44 и 12 подают на параллельно (последо вательно) соединенные обмотки 26-30 (фиг. 9), сердечники которых взаимо действуют с зубцами 49 и 55 соответ ственно. При этом происходит поворот диска б по часовой стрелке и зубец 48 занимает место зубца 47 (фиг. 4) . Одновременно на угол dL по ворачивается храповик 4 и кулачкова шайба 8 занимает положение, показан ное на фиг. 3, а контакты 12 и 13 займут положение, показанное на фиг. 5. Реле получает питание и после выдержки времени переключает контакты 44 и 46 из положения, показанного на фиг. 12, в положение, показанное на фиг. 5, Поворот главного вала 3 против .часовой стрелки на одну позицию осуществляют аналогично. Таким образом, нажатием кнопки 38 обеспечивают переключение на одну по зицию по часовой стрелке, т.е. набор позиций контроллера, а нажатием кнопки 39 - сброс позиций контроллера по одной позиции. Для быстрого сброса позиций на ну левую нажимают кнопку 40. При этом обмотки получают питание. Их сердечники, взаимодействуя с зубцами 4 7 и 53, обеспечивают поворот фер ромагнитного диска б на одну позицию против часовой стрелки. При этом зуб цы диска устанавливаются в положении, показанном на фиг. 9, а контакты 14 и 15 под Боэдейстзием кулачковой шайбы 9 из положения, показанного а фиг. 5, переключается в положение, показанное на фиг. 11, т.е. питание получают обмотки 25-29 и, взаимодействуя с зубцами 49-55, поворачивают диск из положения по фиг. 9 в положение по фиг. 4, а контакты 14, 15 переходят в положение по фиг. 5. Таким-образом, удерживая кнопку 40, обеспечивают поочередное непрерывное переключение вала против часовой стрелки по позициям до упора, т.е. быстрый сброс позиций контроллера на нулевую. Для осуществления поворота реверсивного вала 16 из нулевого положения в положение Вперед, т.е. на одну позицию по часовой стрелке, нажимают кнопку 41. При этом обмотки 32-35 получают питание и, взаимодействуя с зубцами 58-60 ферромагнит ного диска 19, обеспечивают его поворот по часовой стрелке в положение, показанное на фиг. 9. Для осуществления поворота реверсивного вала 16 из нулевого положеНазадт.е. на ния в положение одну позицию против часовой стрелки, нажимают кнопку 42. Переключение происходит аналогично переключению Вперед. Перевод реверсивного вала 16 из одного из крайних положений в нулевое (фиг. 4) осуществляют нажатием кнопки 43. При этом обмотки 32-36 взаимодействуют с зубцам 57 и 59. Таким образом, переключение реверсивного вала в положения Вперед, Назад и О осуществляют нажатием кнопок 41, 42 и 43. Устройство обеспечивает безударную работу привода контроллера благодаря согласованию тяговой и противодействующей характеристик, что уменьшает ударный износ и повьшает экономические показатели устройства в целом. Так, например, на фиг. 13 заштрихованная область между тяговой характеристикой ТХ1 пневматического привода и противодействующей характеристикой ПХ фиксирующего механизма контроллера есть не что иное, как избыток тяги над противодействием, который полностью расходуется на удар в конце хода, т.е. храповик 4 вместе с валом 3 поворачивается из положег НИН, показанного на фиг. 2 в положение, показанное на фиг. 8, с большой скоростью, и ролик рычага 5 принимает на себя удар, что приводит к постепенному разбиванию и потере работоспособности всего фиксирующего узла. Кроме того, бывают случаи перебросов вала через две позиции контроллера, когда фиксирующий рычаг 5 не может сдертсать храповик 4. Тяговая характеристика ТХ2, показанная на фиг. 14, получается в том случае, если угол |5 между осью зубца 47 ферромагнитного диска 6 и осью эааимодействукмцего с ним электромагнита равен углус, т.е. углу фиксации вала контроллера. Как видно из фиг. 14 тяговая характеристика ТХ2 более удачно согласуется с противодейств5пющей ПХ, однако и она не исключает запас энергии в конце хода, т.е. в точке фиксации по прохождению валом угла . Рассмотрим характер работы описываемого устройства, где соотношение между углами f тя. L следующее joi . При взаимодействии, например, сердечника 23 электромагнита с зубдом 47 ферромагнитньзй диск 6 поворачивается по часовой стрелке до совпадения оси зубца 47 с осью обмотки 24 электромагнита, т.е. диск 6проходит угол |i. При этом развивается тяга, соответствувэщая положительному участку тяговой характеристики ТХЗ, т.е. вращающий момент направлен по часовой стрелке. При достижении угла / ролик рычага 5 проходит вершину зуба храповика 4 (на фиг. 14 противодействующая характеристика ПХ переходит в отрицательную ветвь) и ролик пэдпружиненного рычага 5 меняет направление
воздействия на храповик 4, т.е. толкает храповик по часовой стрелке. В этом период зубец 47 из положения показанного на фиг. б, переходит в положение, показанное на фиг. 9, под действием фиксирующего механизм (фиг. 7). При этом магнитодвижущая сила в зазоре между электромагнитом с обмоткой 24 и зубцом 47 действует в направлении против часовой стрелк т.е. она противодействует повороту всей системы по часовой стрелке. На фиг. 14 этому участку соответствует отрицательная ветвь характеристики ТХ 3,которая в конце угла oL фиксаци становится больше противодействующей характеристики.
Таким образом, торможение в конце хода происходит не за счет удара ролика рычага 5 в зуб храповика 4 (фиг. 8), а за счет изменения напраления магнитодвижущей силы.
Обеспечение торможения в конце хода при переключении с позиции на позицию за счет разности углов между осью зубца диска и осью взаимодействующего с ним сердечника электромагнита |Ъ и d. угла фиксации контроллера позволяет исключить удары при фиксирующего механизма, а также возможность переброса вала более, чем на одну позицию. За счет значительного упрощения кинематической схемы и наличия торможения изобретение позволяет увеличить срок службы устройства повысить надежность его работы и уменьшить эксплуатационные расходы за счет исключения пневмоцилиндров и
электропневматических вентилей, тре бующих постоянной смазки и ухода.
Формула изобретения
Устройство для дистанционного управления локомотивом, содержащее соединенный с цепями управления последнего выносной пульт, контроллер с главным и реверсивными валами, связанными с механизмами поворота и фиксации, и кулачковый барабан, а также блок быстрого сброса пози-. ций контроллера, отличающееся тем,что,с целью повышения на5 -1 дежности и увеличения срока службы устройства, механизм поворота выполнен из установленных на валах контроллера ферромагнитных дисков с радиально расположенными зубцами и электромагнитов, -охватывающих диски и подключенных в электрическую цепь пульта управления, а блок быстрого сброса позиций выполнен в виде установленных на главном валу контроллера кулачков, взаимодействующих с контактами, включенными последовательно с обмотками электромагнитов механизма поворота, при этом корпус последнего выполнен шихтованным и имеет зубцы, являющиеся сердечниками электромагнитов.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 647162, кл. В 61 С 17/12, 1976 (прототип).
/J
ВидА
16 17 4
Фиг.З .


| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное средство | 1977 |
|
SU671173A1 |
| Групповой электропневматический контактор | 1933 |
|
SU43593A1 |
| Система автоматического переключения ступеней скорости гидравлической передачи транспортной машины | 1982 |
|
SU1129086A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КОМПАУНДНЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ | 1935 |
|
SU46970A1 |
| Устройство для печатания и выдачи проездных билетов с автоматической кассой | 1940 |
|
SU70277A1 |
| Кулачковый контроллер | 1980 |
|
SU943688A1 |
| Бензинораздаточная колонка | 1936 |
|
SU52910A1 |
| УСТРОЙСТВО ДЛЯ РУЧНОГО ДИСТАНЦИОННОГО РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ПЕЧЕЙ | 1935 |
|
SU49384A1 |
| Манипулятор для очистки железнодорожных полувагонов | 1985 |
|
SU1335492A1 |
| Переключающее устройство кулачкового контролера двухстороннего действия | 1974 |
|
SU491498A1 |

В-в
Фиг
-|л фаг. б
/2
J
JL
t
45
Фиг. //
iZ
Фиг.1
Фиг. f
