(5) МЕХАНИЗМ ДЛЯ ПЕРЕРАСПРЕДЕЛЕНИЯ НАГРУЗКИ МЕЖДУ ВЕДУЩИМИ МОСТАМИ
1
Изобретение относится к транспортному машиностроению, в частности к трансмиссиям транспортных средств.
Известен механизм для перераспределения Нагрузки между ведущими мостами транспортного средства, содержащий межосевой симметричный дифференциал, солнечные шестерни которого соединены с приводными валами ведущих мостов, а корпус - с коробкой передач транспортного средства D .
Недостатком данного механизма является разная величина нагрузки на ведущие мосты, возникающая в результате действия тягового усилия, неодинаковая величина крутящих моментов и коэффициентов буксования ведущих мостов, что приводит к ухудшению проходи юсти, снижению тягово-сцепных показателей и увеличению глубины колеи у колес моста, имеющих большее буксование. ТРАНСПОРТНОГО СРЕДСТВА.
Цель изобретения - повышение тягового КПД, путем выравнивания угловых скоростей приводных валов ведущих мостов.
Эта цель достигается тем, что механизм снабжен дополнительным симметричным дифференциалом и регулирующим устройством, причем солнечные шестерни дополнительного; дифференциала попарно соединены с солнечными шестер10нями межосевого дифференциала зубчатыми передачами, передаточные отношения которых равны по величине и /противоположны; ПО знаку, а корJ5 пус дополнительного дифференциала соединен с регулирукхцим устройством.
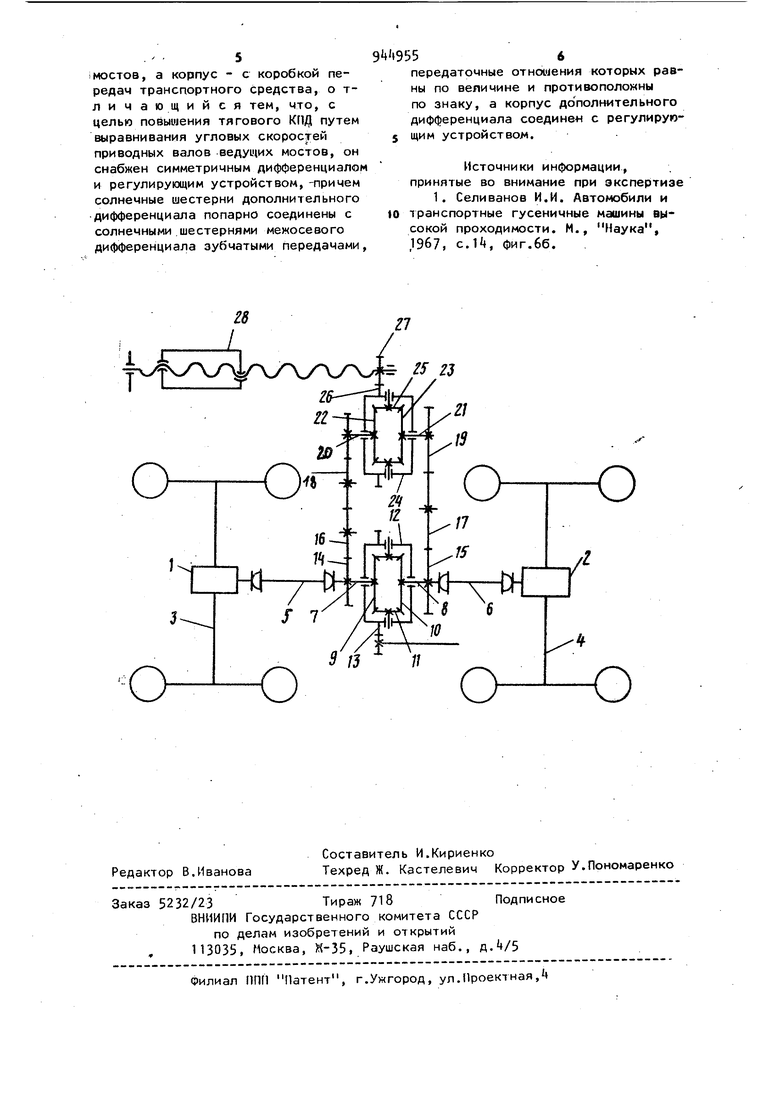
На чертеже показана кинематическая схема механизма.
Механизм содержит межколесные самоблокирующиеся дифференциалы 1 и 2
20 соответственно переднего 3 и заднего мостов, приводные валы 5 и 6 ведущих мостов, соединенные с полуосями 7 и 8 межосевого дифференциала, содержащего.солнечные шестерни 9 и 10 находящиеся в зацепление с сателлитами 11, установленными в корпусе 12 дифференциала. Корпус 12 имеет шестернч 13, находящуюся в зацеплеНИИ с шестерней привода коробки передач. На полуосях 7 и 8 установлены шестерни и 15, которые попарно соединены зубчатыми передачами 16 и 17, имещими передаточные отношения равные по величине и противоположные по знаку, с шестернями 18 и 19, установленными на полуосях 20 и 21 совместно с коническими шестернями 22 и 23 корпуса 2 дополнительного дифференциала. Конические шестерни 22 и 23 соединены с сателлитами 25, установленными в корпусе 24 дополнительного дифференциала, а шестерп ня 26 корпуса 2k имеет зацепление с шестерней 27, которая связана с регулирующим устройством 28. Механизм работает следующим образом. . Крутящий момент от коробки передач передается шестерне 13 корпуса 12 межосевого дифференциала, установленным -в корпусе саттелитам 11, от них солнечным шестерням 9 и 10 и шестерням 1 и 15 и .посредством приводных валов 5 и 6 - межколесным дифференциалам 1 и 2 ведущих мостов 3 и 4. С другой стороны от шестерен 14 15 крутящий момент передается через зубчатые передачи 16 и 17 соответ ственно шестерням 18 и 19 и коничес ким шес ерням 22 и 23 и связанным с ними сателлитам 25, шестерне 26 корпуса 24 дополнительного дифферен циала, а от нее шестерне 27 регулирующего устройства 28. При равенстве угловых скоростей вращения приводных валов 5 и 6 ведущих мбстов 3 и 4 шестерни 18 и 19 дополнительного дифференциала имеют равное по величине и противоположное по направлению вращение, в результате чего конические шестерни 22 и 23 обкатываются вокруг сателлитов 25, а корпус 24 и шестерня 26 корпуса остаются неподвижными При разных угловых скоростях вращения приводных валов 5 и 6 ведущих мостов 3 и 4 шестерни 14 и 15 передают разные по величине и направлению угловые скорости шестерням 18 и 19 и установленным совместно с ними на полуосях 20 и 21 коническим шестерням 22 и 23, а, следовательно, и разные линейные скорости в зоне зацепления этих шестерен с сателлитами. Благодаря этому мгновенный центр вращения саттелита смещается относительно его оси в сторону меньшей линейной скорости в зацеплении, а центр оси приобре. тает линейную скорость, направленную в сторону большей линейной скорости в зацеплении При этом корпус 24 дополнительного дифференциала, шестерня 26 и связанная с ней шестерня 27 регулирующего устройства 28 вращаются с угловой скоростью, пропорциональной разности угловых скоростей вращения приводных валов 5 и 6. Направление корпуса 24 и шестерни 26 будет определяться тем, какой приводной вал имеет большую угловую скорость. Устройство 28 будет перераспределять нагрузку на ведущие мосты 3 и 4, благодаря чему изменятся коэффициенты буксования колес ведущих мостов и соответственно уменьшится разность угловых скоростей приводных валов 5 и 6. Это. при веде т к уменьшению угловой скорости вращения корпуса 24, шестерни 2б и шестерни 27 устройства 28. Когда угловые скорости вращения приводных валов 5 и 6 (а соответственно и коэффициенты буксования колес) передних и задних мостов станут равными, корпус 24 и шестерня 26 остановятся и прекратится перераспределение нагрузки устройством 28., Следовательно, чем меньше разность угловых скоростей вращения приводных валов 5 и 6, тем медленнее будет происходить перераспределение нагрузки между мостами. Данная особенность механизма для перераспределения нагрузки ведущими мостами транспортного средства устранит возникновение опасных автоколебательных процессов. Формула изобретения Механизм для перераспределения нагрузки между ведущими мостами транспортного средства, содержащий мемосевой симметричный дифференциал, солнечные шестерни которого соединены с приводными валами ведущих
iмостов, a корпус - с коробкой передач транспортного средства, о тличающийся тем, что, с целью повышения тягового КПД путем выравнивания угловых скоростей приводных валов ведуи1их мостов, он снабжен симметричным дифференциалом и регулирующим устройством, -причем солнечные шестерни дополнительного дифференциала попарно соединены с солнечными шестернями межосевого дифференциала зубчатыми передачами,
tiSSS6
передаточные относиения которых равны по величине и противоположны по знаку, а корпус дополнительного дифференциала соединен с регулирую5 щим устройством.
Источники информации, принятые во внимание при экспертизе
1. Селиванов И.И. Автомобили и to транспортные гусеничные машины высокой проходимости. М., Наука, ,1967, с.14, фиг.бб.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм перераспределения нагрузки между ведущими мостами транспортного средства | 1983 |
|
SU1111897A2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ ДЛЯ ПРИВОДА КОЛЕС ИЛИ МОСТОВ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2520224C1 |
| Межосевой дифференциальный механизм распределения мощности | 2022 |
|
RU2785499C1 |
| ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2093374C1 |
| МОСТ С ЦИЛИНДРИЧЕСКОЙ ГЛАВНОЙ ПЕРЕДАЧЕЙ В ХОДОВОЙ ЧАСТИ | 2023 |
|
RU2811589C1 |
| ТРАНСМИССИЯ ТРАНСПОРТНОЙ МАШИНЫ ВЫСОКОЙ ПРОХОДИМОСТИ | 1998 |
|
RU2163868C2 |
| ДИФФЕРЕНЦИАЛЬНАЯ ПЕРЕДАЧА ТРАНСПОРТНОГО СРЕДСТВА В.П.ДЕМИНА | 1989 |
|
RU2010138C1 |
| СИЛОВАЯ ПЕРЕДАЧА ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОАВТОМАТИЧЕСКИМ РЕГУЛИРОВАНИЕМ МОЩНОСТИ НА КОЛЕСНО-ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ | 2011 |
|
RU2517025C2 |
| МЕХАНИЗМ БЛОКИРОВКИ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 1995 |
|
RU2091249C1 |
| МЕХАНИЗМ БЛОКИРОВКИ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 1995 |
|
RU2091250C1 |
гв
п
О
О
