(5) ЗАДАЮЩЕЕ УСТРОЙСТВО ДЛЯ ЭЛЕКТРОПРИВОДА
1
Изобретение относится к автоматизированному электроприводу и может быть использовано в качестве задающего устройства электропривода шахтных подъемных установок.
Известно задающее устройство для электропривода подъемника, содержащее инвертирующий ключ и последовательно соединенные интегрирующие усилители
Однако в этом устройстве продолжительность рывка определяется только уровнем выходного сигнала (при достижении заданного уровня происходит переход к формированию следующего участка диаграммы), что не исключает динамические нагрузки на узлы подъемника и, следовательно влияет на срок их . Кроме трудности точного задания длительности рывка,, затруднена автоматическая перестройка задающего устройства при работе подъема с разных горизонтов шахты. Так, напри р. ПОДЪЕМНИКА
при значительной перемене длины каната необходимо изменять и время рывка, для того чтобы исключить колебания груза при пуске механизма, что делает это устройство недостаточно удобным в эксплуатации.
Цель изобретения - увеличение срока службы и повышение удобства эксплуатации.
Эта цель достигается тем, что в
(О устройство введены управляемый одновибратор, блок датчиков, пороговая схема и дифференцирующая цепь, причем выход управляемого одновибратора через инвертирующий ключ
15 подключен к входу первого интегрирующего усилителя., а выход второго интегрирующего усилителя через пороговую схему и Аи(х еренцирующую цепь, как и входной сигнал подключен к
20 запускающему входу управляемого одновибратора, к управляющему входу которого под спючен выход блока датчиков, а выход пороговой схемы соединеи с упраоляющим входом инвертирующего ключа.
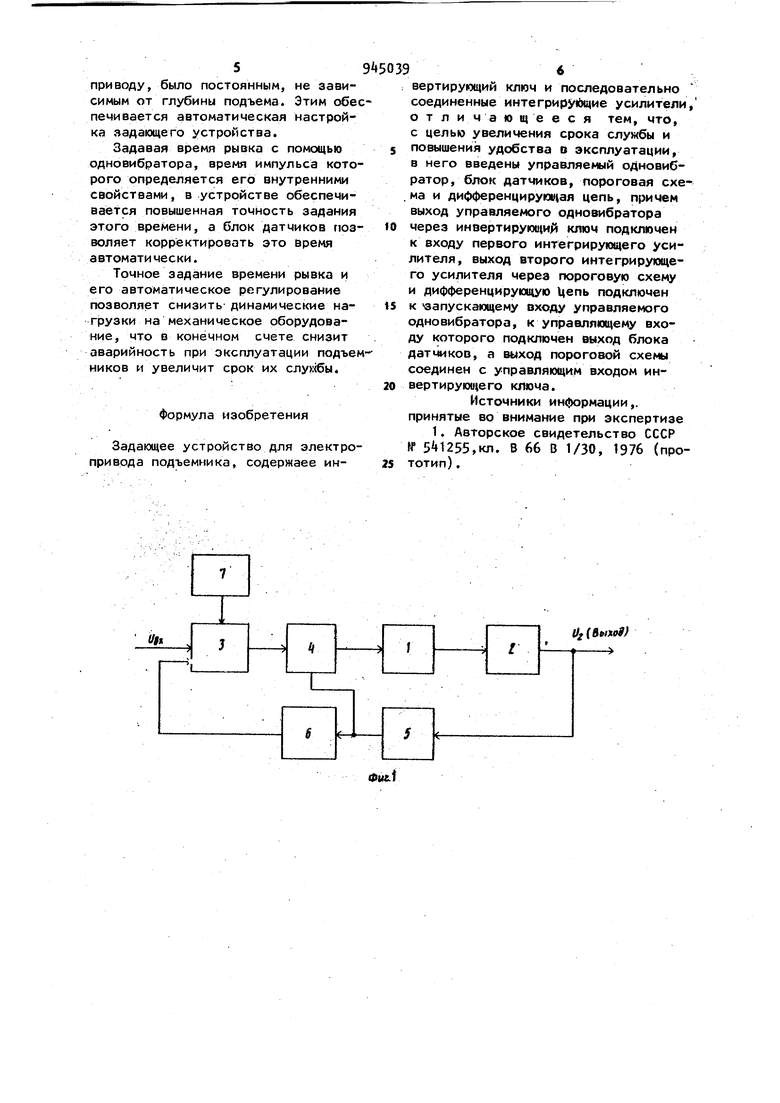
На фиг.1 представлена функционалнал схема устройства; на фиг.2 временных диаграммы работы устройства; на фиг.З - характеристика вход-выход пороговой схемы обратной связи устройства.
Задающее устройство состоит из двух последовательно включенных
интегрирующих усилителей 1 и
управляемого одновибратора 3 с инвертирующим ключом k, пороговой схемы 5, дифференцирующей цепи 6. и блока 7 датчиков. Выход одновибратора 3 через инеертируюм.ий ключ 4 подключен к входу интегрирующего усилителя 1. С интегрирующего усилителя 2 снимается выходной сигнал и сигнал обратной связи, поступаюи1ИЙ через пороговую схему 5 и дифференцирующую цепь на запускающий вход одновибратора 3. Кроме этого, выходной сигнал схемы 5 является управляющим для инвертирующего ключа А, Импульсы, соответствующие началу пуска и замедления, поступают также на запускающий вход одновибратора 3.- Время и амплитуда выходного импульса одновибратора 3 регулируются выходным сигналом (сигналами) блока 7 датчиков.
Устройство работает следующим образом.
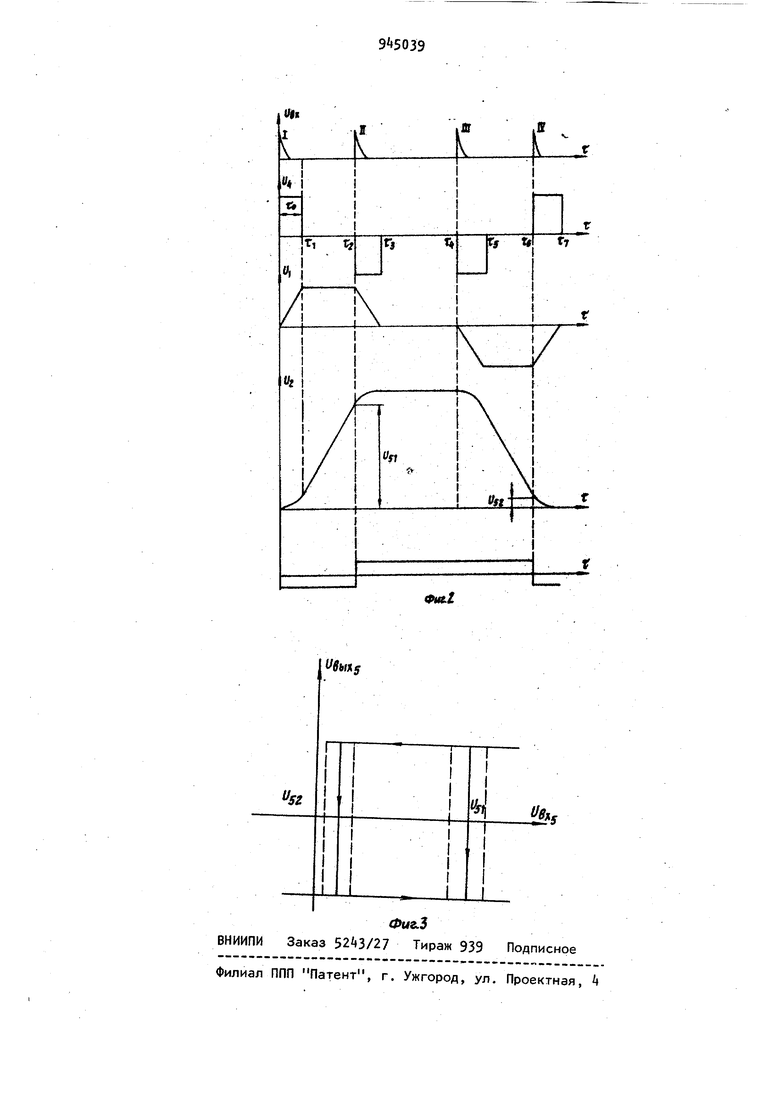
В начальный мбмент на одновибра-, тор 3 подается запу -кающий импульс (фиг.2, поз. 1-(1вх). Одновибратор « формирует импульс (lJ) прямоугольной формы длительностью, равной to - времени рывка. Этот импульс одновибратора является для устройства заданием рывка. Задание через инвертирующий ключ поступает на вход первого интегрирующего усилителя.
Функции инвертирующего ключа заключаются в следующем: при отрица- . тельном сигнале на входе ключ пропускает через себя сигнал, не инвертируя его, при смене полярности управляющего сигнала сигнал, проходящий через ключ, инвертируется. Выходной сигнал первого интегрирующего усилителя и за время от О до f. изменяемся по линейному закону, являясь сигналом задания ускорения электропривода. Выходной сигнал второго интегрирующего усилителя Urt изменяется в это время по параболическому закону, задавая скорость
электропривода. После окончания импульса одновибратора сигнал U перестает нарастать и время от IT доСл является временем движения с постояным ускорением. В это время сигнал Un нарастает по линейному закону до тех пор, пока напряхшние на входе схемы 5 обратной связи не достигнет значения напряхчения Uc-x (фиг.З).
При условии схема 5 изменяет свое состояние (фиг.2, гра фик Uj) и при этом, проиаходят следующие процессы. Через дифференцирующую цепь б на запускающий вход одновибраторп поступает импульс (фиг.2, поз. и). Одновременно из-за смены полярности выходного сигнала инвертирующий ключ подает сигнал на первый инвертируюи1ий усилитель 1 противоположной полярности. Это приводит к тому, что сигнал на входе первого интегрирующего усилителя 1 начинает y6biBatb по линейному закону до нуля, а выходной сигнал второго интегрирущего усилителя 2 по параболе переходит к установившемуся значению. Таким образом, разгон заканчивается.
Процессы во время замедления протекают аналогичным образом. Приходит импульс начала замедления (фиг., 2,поз. Ш)и из-за гистерезиса пороговой схемы его обратное переключение происходит при уменьшении выходного сигнала до (фиг.2, поз. IV и фиг.З). Нижний порог срабатывания схемы 5 определяет конечное значение заданной С1сорости (нул или скорость дотягивания). Таким образом конечное значение скорости и моменты Начала ее изменения контролируются обратной связью, а моменты плавных переходов задаются временем импульса одновибратора 3.
Блок датчиков, введенный в задающее устройство, позволяет адаптировать диаграмму скорости к условиям эксплуатации.
При наличии нескольких глубин подъема, с которых необходимо под- . нимать груз, на каждой из них устанавливается датчик, который при пуске электропривода с этого горизонта выдает два сигнала. Один из сигналов определяет время импульса однооибратора (длительность рывка), а .второй задает амплитуду этого импульса таким образом, чтобы ускорение, задаваемое электро-
приводу, было постоянным, не зависимым от глубины подъема. Этим обеспечивается автоматическая настройка задающего устройства.
Задавая время рывка с помощью одновибратора, время импульса которого определяется его внутренними свойствами, в устройстве обеспечивается повышенная точность задания этого времени, а блок датчиков позволяет корректировоть это время автоматически.
Точное задание времени рывка и его автоматическое регулирование позволяет снизить динамические нагрузки на механическое оборудование, что в конечном счете снизит аварийность при эксплуатации подъемников и увеличит срок их .
Формула изобретения
Задающее устройство для электропривода подъемника, содержаее инвертирующий ключ и последовательно соединенные интегриру1бщие усилители, отличающееся тем, что, с целью увеличения срока службы и повышения удобства в эксплуатации, в него введены управляемый одновибратор, блок датчиков, пороговая схема и ди(М)еренциру|Эдая цепь, причем выход управляемого одновибратора
через иноертирую(1(ий ключ подключен к входу первого интегрирующего усилителя, выход второго интегрирующего усилителя через пороговую схему и дифференцирующую Цепь подключен
к -запускающему входу управляемого одновибратора, к управляющему входу которого подключен выход блока датчиков, а выход пороговой схемы соединен с управляющим входом инвертируюв1его ключа.
Источники информации,, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № ,кл. В 66 В 1/30, 1976 (прототип).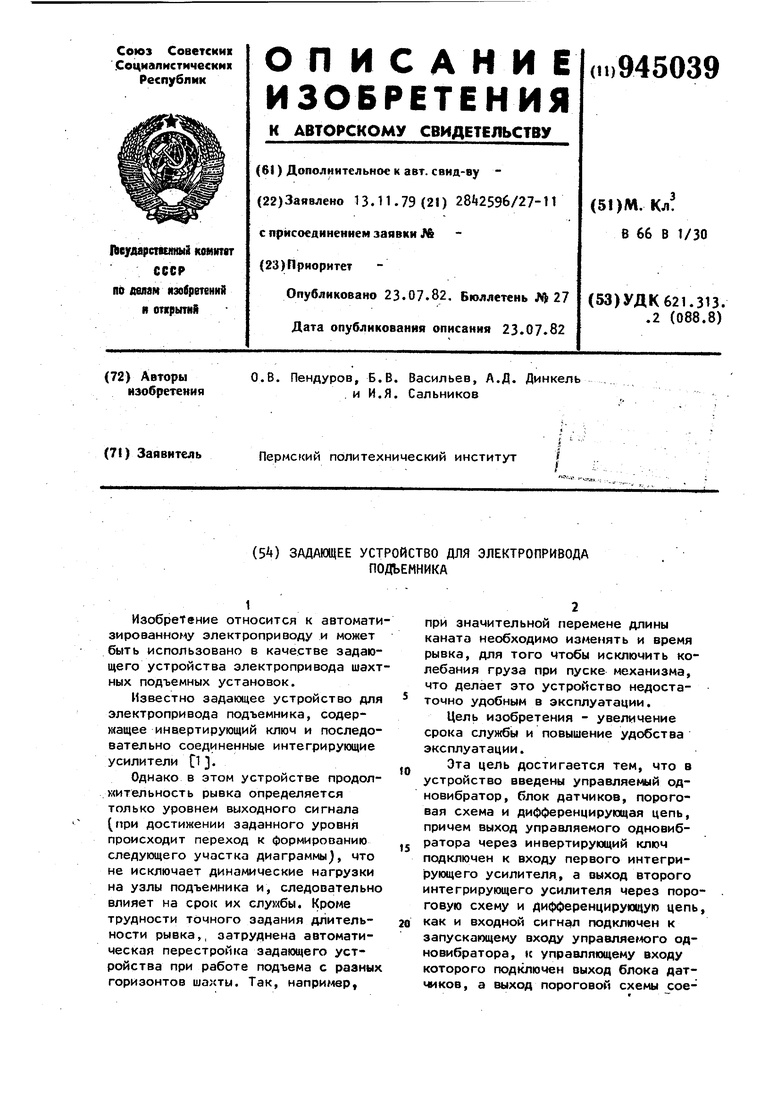
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования режимов работы скиповых подъемных установок | 1987 |
|
SU1430334A1 |
| Электропривод стенда для испытания механических передач | 1985 |
|
SU1429267A1 |
| Устройство для управления частотно-регулируемым электроприводом | 1988 |
|
SU1601728A1 |
| Цифровой элетропривод | 1986 |
|
SU1399876A1 |
| Устройство для управления регулируемым мостовым инвертором | 1988 |
|
SU1548830A1 |
| Устройство для задания режима движения шахтной подъемной установки | 1986 |
|
SU1444265A2 |
| Устройство для контроля электромагнита | 1986 |
|
SU1348776A1 |
| Устройство для электроразведки в движении | 1985 |
|
SU1242884A1 |
| Система для статической стабилизации частоты вращения бесконтактного двигателя постоянного тока | 1976 |
|
SU681514A1 |
| Устройство для управления реверсивным тиристорным широтноимпульсным преобразователем | 1976 |
|
SU657568A1 |