(5А) УСТРОЙСТВО для БАЛАНСИРОВКИ РОТОРОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЛУАВТОМАТИЧЕСКИЙ БАЛАНСИРОВОЧНЫЙ СТАНОК | 2012 |
|
RU2515102C1 |
| СПОСОБ БАЛАНСИРОВКИ НЕСИММЕТРИЧНЫХ РОТОРОВ | 2006 |
|
RU2310177C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА | 2004 |
|
RU2292534C2 |
| Балансировочное устройство | 1980 |
|
SU945698A1 |
| СПОСОБ УСТАНОВКИ БАЛАНСИРУЕМОГО РОТОРА В ПОЛОЖЕНИЕ КОРРЕКТИРОВКИ МАСС И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
RU1757311C |
| СПОСОБ НАСТРОЙКИ БАЛАНСИРОВОЧНОГО СТЕНДА ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МАССОИНЕРЦИОННОЙ АСИММЕТРИИ РОТОРОВ | 2011 |
|
RU2453818C1 |
| БАЛАНСИРОВОЧНЫЙ СТАНОК ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2007 |
|
RU2339926C1 |
| Балансировочный станок | 1977 |
|
SU729456A2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| Автоматическая балансировочная линия | 1985 |
|
SU1272134A1 |
1
Изобретение относится к балансировочной технике и может быть использовано в вибрационной технике.
Известно устройство для балансировки роторов, содержащее опоры, связанные с ними датчики вибрации, указатель дисбаланса, соединенный с датчиками вибрации, механизм корректировки, выполненный в виде сверлильной головкиj управляемой автоматичес-, КИМ блоком управления. Задания глубины сверления происходит вручную с помощью микрометрического винта Гт.
Недостатком устройства является невысокая точность балансировки,обу- 15 словленная ручной настройкой глубины сверления.
Наиболее близким по технической сущности к изобретению является устройство для балансировки роторов, . 20 содержащее опоры, связанные с ними датчики вибрации, указатель дисбаланса, соедиеннный с датчиками вибраД ции, установленные в плоскости коррекции механизмы корректировки, каждый из которых, выполнен в виде элект ромагнита, питающегося от источника постоянного тока, контакт t кулачком, закрепляемым на роторе,и потенциометр регулировки амплитуды колебаний.
Через контакт на электромагнит i поступает по одному импульсу тока за каждый оборот ротора, амплитуду которого меняют потенциометром 2.
Недостатком устройства является невысокая точность кулачка, вращающегося вместе с осью балансируемого ротора и потенциометрическим регулятором амплитуды колебаний.
Цель изобретения - повышение точности балансировки.
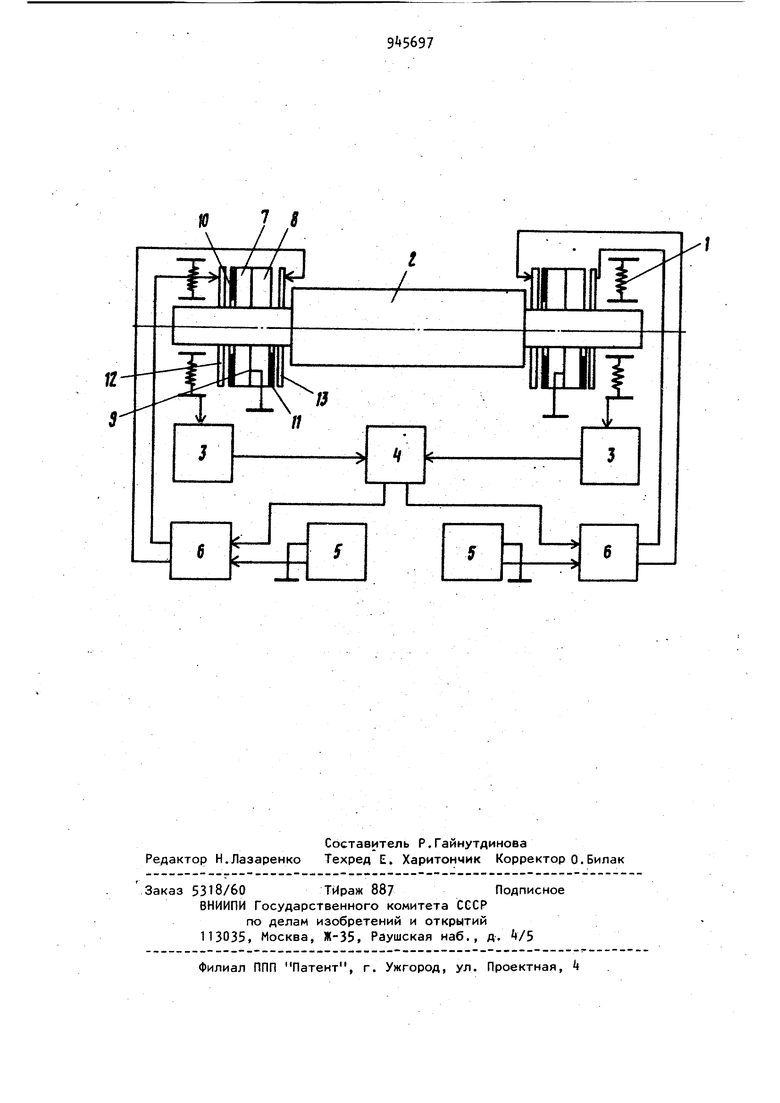
Поставленная цель достигается тем, что в устройстве для балансировки роторов, содержащем опоры, связанные с ними датчики вибрации, указатель дисбаланса, соединенный с датчиками вибрации, и установленные в плоскостях коррекции механизмы корректировки, каждый из механизмов корректиров ки выполнен в виде двух кольцевых пьезоэлементов с одним общим электро дом и двумя электродами в виде; получ, дисков ,смещенных один относительно другого в окружном направлении на 90°, и двух дисковых электродов, каж дый из которых установлен соосно с пьезоэлементами и связан с соответствующим полудиском. На чертеже показано устройство для балансировки роторов, общий вид. Устройство содержит опоры 1 для установки балансируемого ротора 2, . датчики 3 вибрации, связанные с опорами 1, указатель дисбаланса в вид электронного блока, показывающего ве личину и угол дисбаланса, входы которого соединены с датчиками 3 вибра ции, источники 5 питания, блоки 6 переключения, первый вход которого соединен с- выходами указателей , а второй - с выходом источника 5 питания,и установленные в плоскостях коррекции механизмы корректировки, каждый из которых выполнен в виде двух кольцевых пьезоэлементов 7 и 8 с одним общим электродом 9 и двумя электродами в виде полудисков 10 и 11, смещенных друг относительно друга на 90, и двух дисковых электродов 12 и 13 бесконтактного токосъемника, электрически связанных с соответствующими полудисками 10 и 11,уст новленных соосно с пьезоэлементами 7и 8 и соединенных с выходом соответствующего блока 6 переключения. Устройство работает следующим обр зом. Сигналы датчиков i вибрации, пропорциональные дисбалансу ротора 2, поступают на указатель h дисбаланса, на выходе которого получаются сигналы, амплитуды и фазы которых несут информацию о параметрах дисбаланса. Эти сигналы подаются на блоки 6 пере ключения, к дисковым электродам 12 и 13 бесконтактного токосъема через блок 6 переключения от источников 5 питания подается напряжение, величину и знак которого задает электронный блок указателя дисбаланса. На электродах пьезоэлементов 7 и 8возникают заряды, т.е. к ним прилагается электрический потенциал t определенного знака. Этот потенциал приводит к объемным деформациям зоны пьезоэлементов 7 и 8, находящейс под данным электродом. Направление деформации относительно оси вращения зависит от знака напряжения, а.величина деформации зависит от величины напряжения. , . Так как полудиски 10 и 11 расположены под углом 90° друг к другу, направление суммарной Деформации можно задать любое в плоскости, перпендикулярной оси вращения ротора 2. Таким образом, подавая на электроды пьезоэлементов 7 и 8 высоковольтные напряжения,приведем ихк деформациям, в том числе и радиальным,с направлениями, противоположными направлениям центробежных сил дисбалансов ротора 2, уравновешивая его, Hocile этого ротор 2 снимается с балансировочного станка (не показан;, а к полудис.кам ю и 11 подаются постоянные .напряжения, величины и знаки которых задают электронный блок указателя дисбаланса, задавая определенную программу переключений, регулируют деформацию ротора в определенной зоне , т.е. в зоне пьезоэлементов 7 и 8, что позволяет с заданной точностью производить балансировку роторов. Формула изобретения Устройство для балансировки роторов, содержащее опоры, связанные с ними датчики вибрации, указатель дисбаланса, соединенный с датчиками вибрации, и установленные в плоскостях коррекции механизмы корректировки, отличающееся тем, что, с целью повышения 1точностибалансировки, каждый из механизмов корректировки. выпо.пнен в виде двух кольцевых пьезоэлементов с одним общим электродом и двумя электродами в Виде полудисков, смещенных один относительно другого в окружном направлении на 90°, и двух дисковых электродов, каждый из которых установлен соосно с пьезоэлементами и связан с соответствующим полудиском. Источники информации, принятые во внимание при экспертизе 1. Уравновешивание машин и приборов. Под ред. В.А.Щепетильникова, М. Машиностроение,1965, с.508-509. 2. Основы балансировочной техники Под ред. В.А.Щепетильникова. М., Машиностроение, 1975, том 1, с.1б2(прототип).
;/
Яж
/
1
