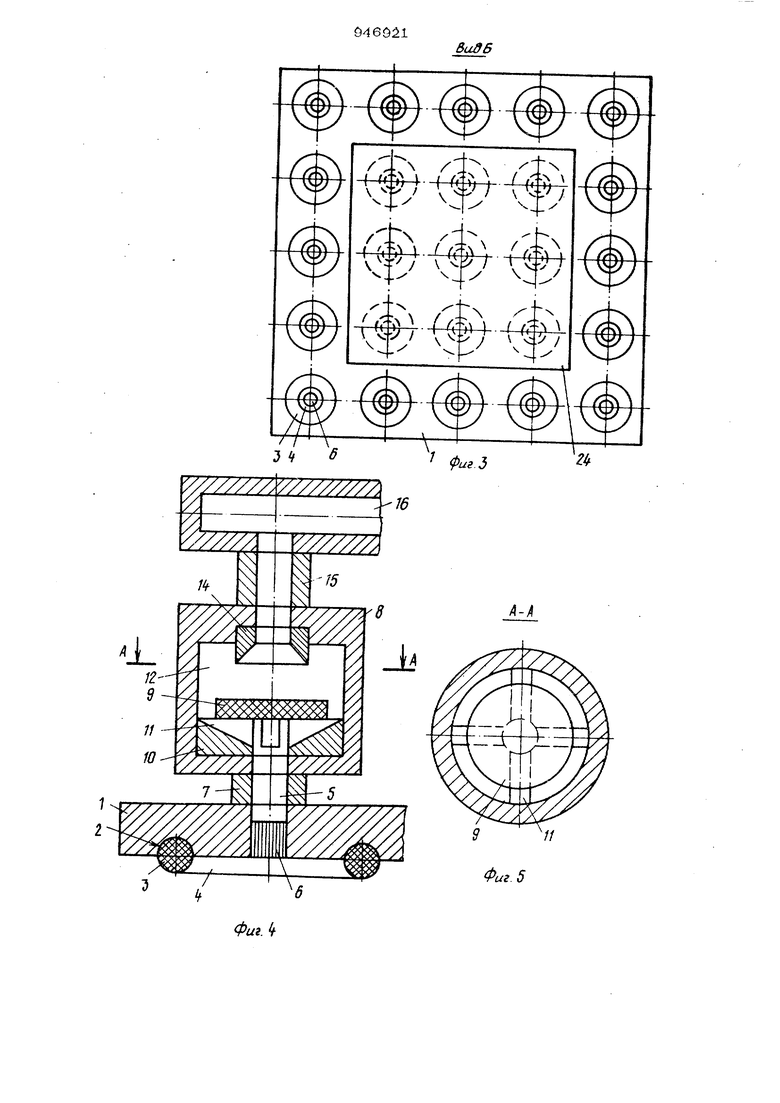
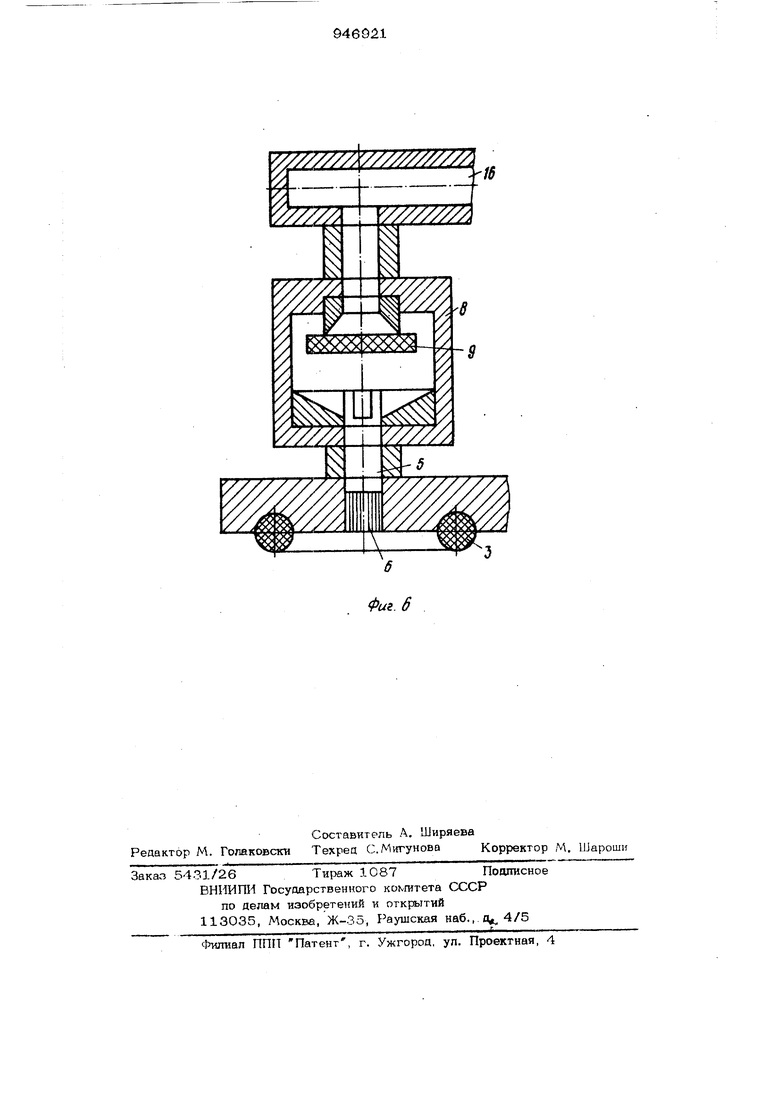
Изобретение относится к машиностроению, а именно к промышленным роботам, или мант:пулягорам, предназ-вченным для транспортироБанип паготовок между прессами. Известен вакуумный захват, содержащий корпус с рабочта-ш полостякга, в которых располох ены пробки с калиброванными отверстиями, причем рабочие полости связаны трубопроводом с кваку МНЫми насосами l . Недостаток известного захвата - поBbiujoHHbifi энергозатраты на создание вакуу ма гфи неполном перекрытииги рабочих полостей корпуса удерживаемым предме- том. Цель изобретения - снижение энепт гчзатрат на создание вакуума ПуУем автома тического отключения негерметичных и неперекрьггых захватываемым предметом ячеек от ваку - -гного насоса. Указанная цель достигается тем, что оахват снабжен по числу рабочих полостей корпуса упругими элементами, а между каждой рабочей полостью и трубопроводом вмонтировано дополнительно введенное дросселирующее устройство, образующее с корпусо- дополнительную полость, в которой распопожен упругий элемент. На фиг. 1 изображено вакуу -1ное устройство, исходное положение; на фиг. 2 то же, в рабочем положении; на фиг. 3 - вид по стрелке Б на фиг. 2; на фиг. 4 - дросселирующее устройство в исходном попоженш ; на фиг. 5 - разрез А-А на фиг. 4; на фиг. б - дросселирующее уст ройство в закрытом положенш. Вакуумное устройство содержит корпус 1 с na3aNfii 2. в которые уложены прокладки 3 VI3 уплотняющего материала , например резины, образующие ячейки 4, в центре каждой ячейки имеется отверстие 5, в которое вставлена пробка 6 из пористого материала или с калибровочным отверстием. Пробка G изготовляется из нержавеющей стали или споцсплавов методом порошковой моталлур1 ии и имеет поры со 5a.v ropoNf 5-10 мкм. В случав применения шробки 6 с калиброванными отверствямп тзх эффективный диаметр составляет О,025-О,25 гм, отверстие 5 соединено втулкой 7 с обрат ным клапаном 8, который содержит лег кий перекрывающий ynpyrTift элемент 9, налртгмер мембрану, выполненную из реэйны. В дросселирующем устройстве в нижней его части со стороны ячейки 4 выполнено нижнее седло 10с каналами 11, соединяющими полость ячейки 4 через пробку 6 с верхней полостью 12 над зтф гим элементом 9 со стороны 1 акуумного насоса 13, В верхней части дроссеяирующего устройства выполнено верх.нее седло 14, к которому герметично прилсотлается упругий элемент 9, верхняя полость дро( селирующего устройства соединена патрубком 15 с общим вакуумным трубо1роводом 16, соединенным с ваку /мным ;асосом 13, между дросселирующими уст 8 и вакуумным насосом 13 в общий вакуумный трубопровод 16 вмонти ровано управляющее устройство 17, сост щее, например, из дросселя 18с ;управляклцшv 1шапаном 19, параллельно им находится дроссель 20 со своим управл ющим клапаном 21, управ,пяюший }шапан 22, который подключает или отключает вакуумный трубопровод от вакуумного на соса и соединяет вакузмный трубопровод 16 с . атмосферой, на столе 23 находится преШЛет 24, подлемсащий захвату м переносу, управляющее устройство 17 может быть выполнено и по-другому, на- , можно пвдключать и отключать источники вакуума различной производительности последовательно друг за дру- гом или может быть выполнено в едином аппарате, в котором при повороте управляющего элемента, например золотника, проходное сечение дросселируется с малого прс-ходного сечения на больщое проходное сечение для полз чения посл1едова тедьно друг за другом двух режик юв патока отсасываемого воздуха из ячеек; 1 неспособного поднять упругий элемент 9: II способного поднять упругий элемент иогерметичных и неперекрь тых за;шаты - в аемых предметом 24 ячеек 4. Вакуумный захЕШт работает следую шим образом. В исходном положении управляющего устройства 17 клапан22 отсоединяет вакуумный трубопровод 16 от вакуумного насосо 13 и соединяет его с атмоо ферой. Упругие элементы 9 находятся в нижнем положении на седлах 1О Уггравляюший клапан 19 дросселя 18 и управлйЮ1дий клапан 21 дросселя 2(. : пкрыты. Дроссель 18 отрегулирован чи малый расход воздуха, слабый поток кгторого не может поднять упругие элг. менты 9, находящиеся под действием гялы тяжести в нижнем положенш на 1гажнем седле 10 дросселирующего устройства 8. Дроссель 20 отрегулирован на такой расход воздуха, поток которого способен поднять элемент О н прижать к верхнему сеплу 14, т. е. закрыть дросселирующее устройство и порекрыть доступ атмосферного в общий вакуумный трубопровод 10. исклю- излишние затраты энергш на создание вакуума в ячейках 4, которые не перекрыты поверхностью захватываемой детали 24. После того, как корпус 1 опускается на лежащий на столе 23 нрепмет 24, который предстоит транспортировать В другое место, упра У1Яющее устройство 17 включает управляющий клапан 19 дросселя 18 и управляющий клапан 22, который подсоединяет общий вакуу тный трубопровод 16 к вакуумнокгу насосу 13 через управляющее устройство 17, что соответствует первом скоростнокту режиму потока отсасываемого воздуха из ячеек 4. Благодаря тому, что при первом режиме работает один дроссель 18, настроенный на малый расход воздухп, в обратных клапанах 8 создается ь гедленкый и слабый поток воздуха, который не К ожет увлечь и поднять упругий эпомент О. лшБь слабо струится через каналы 11. Упругие элементы 9 остаются в исходном положении на нижних седлах 1О. При этом в тех ячейках 4, которые перекрыты опорной поверхностью захва- тываемого предмета 24, создается вакуум, достаточный для того, чгобь обеспечить надежное прижатие транспортируемого предмета 24 к захвату. Атмосферное давление надежно прижимает предмет 24 к прокладкам 3, В тех ячейках , в которых создается достаточная герметичность, движение воздуха после созда П1Я определенного разряжения совсем преК ращается. Упругие элементы О по-прежнему остаются в нижнем положении во всех дросселирующих устройствах 8, Слебое д,вижение воздуха происходит лшиь в тех ячейках 4, которые соесем не пере- крьгты опорной повертностью aaxBnri.iваемого предмета 24 или которые но имеют достаточной герметичности и- -р.) ее неровности. После надежного прижатия избыточным атмосферным
предмета 24 к захвату, управляющее уст ройство 17 включает скоростной режим потока отсасываемого воздуха из ячеек 4; При этом включается управляющий клапан 21 аросселя 20. Клапан 22 остается 5 в том же самом положетги, в котором был в первом режиме. Так как дроссель 20 отрегулирован на больший расход воэдуха, чем дроссель 18, то в дросселирук щих устройствах ячеек 4, которые неО
перекрт 1ты поверхностью предмета 24, скорость и сила воздушного потока увеличивается по сравнению с первым режимом.
Упругие апементы 9 этих ячеек 4 увл&каются усиленным потоком вверх, прижи- маются к верхнему седлу 14 и остаются прижатыми за -чет разности давлений в вавакуукГном трубопроводе 16 и атмосфере. Соответствующие дросселирующие устройства 8 закрываются, тем самым прекра- 20 шается доступ атмосферного воздуха в вакуумный трубопровод 16 и тем самым исключаются излишние энергозатраты на откачку возьуха через ячейки 4, которые совсем не перекрыты поверхностью пред- 25 мета 24 или перекрыты, но неплотно, так иго :такая ячейка 4 не создает подъемной силы, но через нее происходит подсос атмосферного воздуха. Таким образом, экономятся энергозатраты на ненужную 30 откачку воздуха. В ячейках же 4, которые достаточно надежно уплотнены опорной поверхностью предмета 24, движение воздуха не происходит, так как он уже откачен в первом режиме. При этом jj происходит небольшое движение воздуха малых неплотностей между резиновыми прокладками 3 и поверхностью предм та 24, но такой слабый поток воздуха не способен поднять упругий элемент 9. 40 Мембраны 9 продолжают находиться в нижнем положении, т. е. лежат на нижних седлах 10. Ячейки 4 с помощью каналов 11 соединены с общим вакуумным трубопроводом 16 и в ячейках 4 поддерживает- д
ся вакуут.{, если все же имеются небольшие неплотности. После того, как предмет 24 надежно призкат к захвату, проис ходит его транспортирование в заданное место. Затем управляющее устройство 17 переключается в 1И-ий режим: управляк пгае клапаны 19, 21 и 22 закрываются, отсоединяя вакуумный трубопровод 16 от вакуум-насоса 13. Клапан 22 соединяет вакуумный трубопретзод 16 с атмосферой. Давление в вакуумном трубопроводе выравнивается с атмосферным и предмет 24 отпадает от захвата. При легких предметах 24 желательно производить обрат ную продувку воздухом дрюсселируклцтк устройств для надежного отпадания предмета от захвата.
После отпадания предмета 24 захват и управляющее устройство 17 возвращаются в исходное положение. Далее цикл повторяется.
Предлагаемый захват снижает энергозатраты на создание вакуума.
.Формула изобретения
Вакуумный захват, содержащий корпус с рабочими пoлocтя ш, в которых расположены пробки с калиброванными отверстиями, причем рабочие полости связаны трубопроводом с вакуук ным насосом , отличающийся тем, что, с целью снижения энергозатрат на создачие вакуума, он снабжен по числу рабочих полостей корпуса упругими элементами, а между каждой рабочей по лостью и трубопроводом вмонтировано дополнительно введенное дросселирующее устройство, образующее с корпусом дополнительную полость, в которой расположен упругий элемент.
Источники информации, принятые во внимание при экспертизе
1. Патент США № 4088312, кл. В 25 В 11/00, 1978. ffc
.д,--.--...Ji,.. --:
--П
:i. L...f JStK-.JI -,-r,
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОСУШКИ ПОЛОСТИ ОБОРУДОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2198361C2 |
| УСТРОЙСТВО для СОЗДАНИЯ РАБОЧИХ ДАВЛЕНИЙ В ГЕРМЕТИЧНОЙ КАМЕРЕ УКУПОРОЧНОЙ МАШИНЫ | 1970 |
|
SU272830A1 |
| Вакуумное грузозахватное устройство | 1989 |
|
SU1735187A1 |
| ВАКУУМНЫЙ ЗАХВАТ | 1990 |
|
RU2043193C1 |
| Устройство для нанесения эмалевого шликера на внутренние и наружные поверхности полых изделий | 1981 |
|
SU985146A1 |
| СПОСОБ И УСТРОЙСТВО ОСУШКИ ГАЗОПРОВОДОВ | 2005 |
|
RU2300062C2 |
| ГИДРОЗАМОК | 1997 |
|
RU2132005C1 |
| КЛАПАН ДЛЯ РАЗДЕЛЕННОЙ НА ЗОНЫ ЯЧЕИСТОЙ ПОДУШКИ | 2003 |
|
RU2298393C2 |
| Укладчик асбестоцементных листов | 1980 |
|
SU927685A1 |
| СТОЧНАЯ СИСТЕМА ДЛЯ ТУАЛЕТА ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2047520C1 |

:4
%/5
Фиг. 6
