Изобретение относится к машиностроению, а именно к конструкциям вакуумных захватных устройств, и может быть использовано в автоматах и полуавтоматах для захвата, транспоpтирования и последующей укладки деталей, имеющих плоские поверхности с отверстиями (например, шайб), а также в роботизированных комплексах листовой штамповки.
Известен вакууммный захват, содержащий корпус с рабочими полостям, в которых расположены пробки с калиброванными отверстиями, причем рабочие полости связаны трубопроводом с вакуумным насосом.
Недостатком этого устройства являются непроизводительные энергозатраты на создание вакуума, вызванные натеканием атмосферного воздуха в полости захвата через отверстия в захватываемой детали. Это приводит к уменьшению грузоподъемности захвата и повышает вероятность потери его работоспособности.
Наиболее близким по технической сущности к предлагаемому устройству является вакуумный захват, содержащий корпус с рабочей полостью, в которой расположен упругий элемент, связанной трубопроводом с вакуумным насосом. Данный захват работает без дополнительных энергозатрат на создание вакуума благодаря наличию клапанов с упругими элементами.
Недостатками устройства-прототипа являются узкие функциональные возможности, обусловленные предохранением от подсоса атмосферного воздуха только при работе захвата в положении, близком к горизонтальному. При другом положении захвата происходит смещение под действием силы тяжести упругого элемента из седла клапана и перекрытия им вакуумного канала. В результате вакуум перестает поступать и формироваться под присосом, нарушая его работоспособность.
Узкие функциональные возможности захвата-прототипа обусловлены также тем, что он не позволяет захватывать изделия, которые имеют плоскую поверхность с отверстиями, например, шайбы.
Цель изобретения расширение функциональных возможностей вакуумного захвата за счет захватывания произвольно ориентированных в пространстве изделий, имеющих плоскую поверхность или плоскую поверхность с отверстиями.
Указанная цель достигается тем, что упругие элементы выполнены в виде пружин, размещенных между направляющими корпуса и плоского диска, расположенного в рабочей полости параллельно плоскости губок на расстоянии от нее и установленного с возможностью перемещения вдоль оси корпуса по направляющим.
Другая цель изобретения повышение эффективности работы захвата за счет саморегулирования скорости потока воздуха в зазоре между диском и поверхностью захватываемого изделия при переменных объемных расходах.
Для достижения этой цели упругий элемент выполнен в виде сильфона, расположенного между корпусом и диском с образованием камеры, сообщающейся отверстиями в диске, выполненном с профилем Вентури, с зазором.
На основании проведенных литературно-патентных исследований можно заключить, что в известной научно-технической литературе отсутствует информация о технических решениях, содержащих заявленную совокупность отличительных признаков. Следовательно, предлагаемое решение отвечает критерию изобретения "существенные отличия".
Положительный эффект изобретения расширение функциональных возможностей вакуумного захвата за счет захватывания произвольно ориентированных в пространстве изделий, имеющих плоскую или плоскую с отверстиями поверхность, достигается благодаря возникающей разности давления в вакуумном захвате и внешней средой. Кроме того, положительный эффект изобретения заключается также в повышении эффективности работы за счет осуществления процесса саморегулирования скорости потока воздуха в зазоре межу диском и поверхностью изделия при переменных объемных расходах.
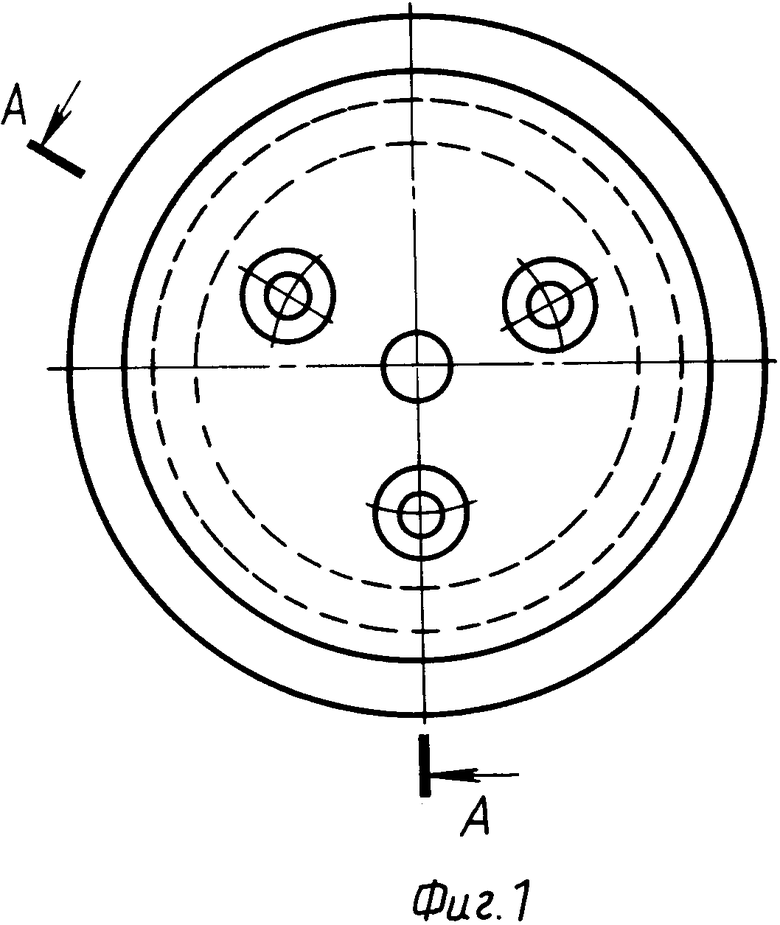
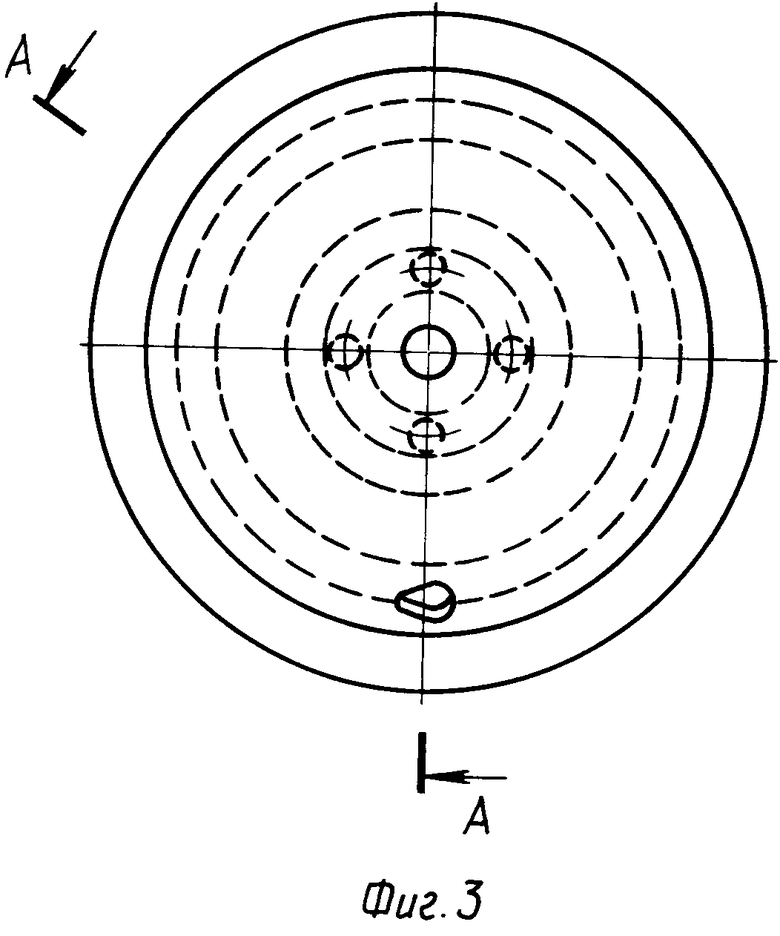
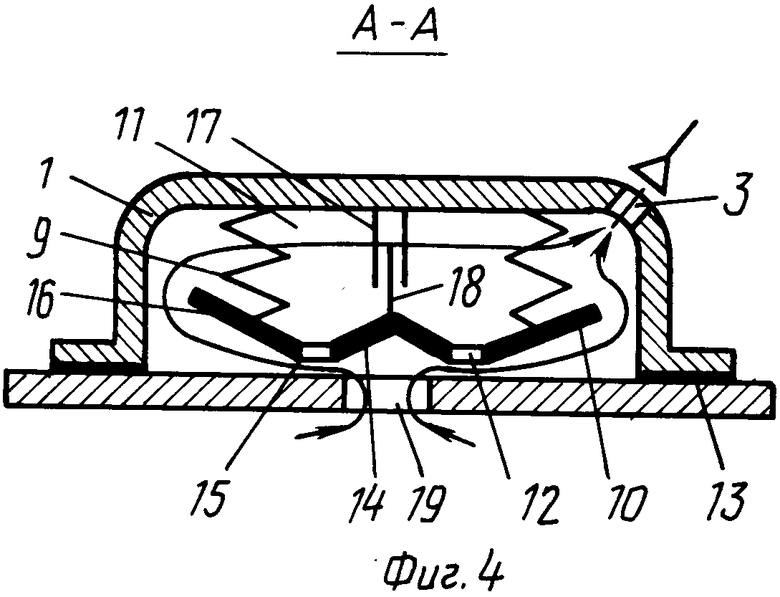
На фиг. 1 и 2 представлена конструктивная схема вакуумного захвата с плоским диском; на фиг. 3 и 4 с сильфоном и диском, выполненным с профилем Вентури.
Устройство содержит корпус 1 с рабочей полостью 2, связанной через отверстие 3 с вакуумным насосом (не показан). В рабочей полости 2 находятся упругие элементы 4, выполненные в виде пружин, размещенных между направляющими 5 корпуса 1 и направляющими 6 плоского диска 7. Направляющие 5 жестко крепятся к корпусу 1, а направляющие 6 жестко укреплены на плоском диске 7. Плоский диск 7 расположен в рабочей полости 2 параллельно плоскости губок 8 на расстоянии от нее. Плоский диск 7 установлен с возможностью перемещения вдоль оси корпуса 1 по направляющим 5 и 6.
При другом конструктивном исполнении захвата упругий элемент выполнен в виде сильфона 9, расположенного между корпусом 1 и диском 10 с образованием сильфоном дополнительной камеры 11. Камера 11 сообщается через отверстия 12, выполненные по окружности диска 10, с объемом зазора, образованного между диском 10 и поверхностью изделия 13. Диск 10 выполнен с профилем Вентури, включающим конфузор 14, цилиндрическое горло 15 и диффузор 16. При этом отверстия 12 выполнены в горле 15 профиля Вентури. Для обеспечения перемещения профильного диска 10 вдоль оси корпуса 1 и предотвращения изгиба сильфона 9 предусмотрены две направляющие 17 и 18. Направляющая 17 жестко связана с корпусом 1, а направляющая 18 жестко соединена с профильным диском 19. Изделие 13 может иметь сквозное отверстие 19.
Вакуумный захват работает следующим образом.
Вакуумный захват опускается на рабочую позицию и губками 8 прижимается к плоской поверхности изделия 13. Через отверстие 3 от вакуумного насоса постоянной производительности в рабочую полость 2 подается вакуум. Если изделие 13 не имеет отверстия 19, то предлагаемое устройство работает как обычный вакуумный захват: в полости 2 формируется вакуум и под действием атмосферного давления изделие 13 прижимается своей плоской поверхностью к губкам 8 и транспортируется далее на другую рабочую позицию. Транспортирование осуществляется по любой сколь угодно сложной траектории, включающей повороты и опрокидывания изделия, что невозможно осуществлять в устройстве-прототипе. При выходе захвате на конечную позицию подача вакуума в рабочую полость прекращается, что приводит к расфиксации захвата и изделия. Захват готов к повторению описанного процесса.
В случае наличия у изделия 13 сквозного отверстия 19 предлагаемый захват работает следующим образом.
Под действием разности давлений, образованной уровнем атмосферного давления, действующего снаружи вакуумного захвата и плоского, а также уровнем отрицательного давления разрежения, действующего со стороны рабочей полости 2, через отверстие 19 формируется воздушный поток. Направление движения этого потока показано стрелками на фиг. 1, 2 и ограничивается отверстием 19 далее зазором между плоской поверхностью изделия 13 и диском 7 или 10 и далее через рабочую полость 2 отверстием 3. Так как площадь поперечного сечения зазора между плоской поверхностью изделия 13 и, например, плоским диском 7 (фиг. 1) является наименьшей, то здесь происходит значительное ускорение воздушного потока. Данное увеличение скорости приводит к уменьшению давления воздуха в зазоре на плоские поверхности диска 7 и детали 13 по сравнению с давлением окружающего их воздуха, обуславливая их взаимное притяжение. При этом под действием данного притяжения изделие 13 прижимается своей плоской поверхностью к губкам 8, а плоский диск 7 перемещается вдоль оси корпуса 1 по направляющим 5 к плоской поверхности изделия 13, сжимая пружины 4. В результате зазор между изделием 13 и диском 7 еще более уменьшается, приводя к еще большему увеличению скорости воздушного потока и дальнейшему уменьшению давления. Наконец, происходит самостабилизация зазора и уровня разрежения между диском 7 и изделием 13 и захват готов к транспортированию изделия. Уровень разрежения между диском 7 и поверхностью изделия 13 достаточен для его удержания и может регулироваться путем изменения производительности откачки вакуумного насоса, площади поперечного сечения зазора, площади диска 7, а также зависит от площади поперечного сечения отверстия 19. После переноса изделия 13 на новую рабочую позицию подача вакуума в полость 2 прекращается, что приводит к освобождению изделия 13.
При переменных объемных расходах воздуха через отверстие 19, обусловленных, например, попаданием в него посторонних частиц (загрязнений, стружки, облоя и т.д.) в процессе транспортирования изделия 13 эффективность работы захвата, показанного на фиг. 1, уменьшается. Для повышения эффективности работы вакуумного захвата в таких условиях необходимо использовать устройство, показанное на фиг. 2.
Принцип работы этого устройства отличается от аналогичного показанного на фиг. 1, тем, что в нем реализуется процесс саморегулирования скорости воздушного потока в зазоре между профильным диском 10 и поверхностью изделия 13 при переменных расходах через отверстие 19.
Осуществляется это следующим образом.
При увеличении объемного расхода воздуха через отверстие 19 в процессе транспортирования (например, в результате увеличения площади его проходного сечения из-за самоочистки от загрязнения потоком воздуха) происходит увеличение скорости воздушного потока также и через зазор между профильным диском 10 и поверхностью изделия 13. Это приводит к уменьшению давления в горле 15, а следовательно, и в связанной с ним отверстиями 12 замкнутой камере 11 сильфона 9. Под действием уменьшения давления в камере 11 происходит сокращение сильфона 9, приводящее к увеличению проходного сечения зазора между диском 10 и изделием 13 и уменьшению скорости воздушного по тока через горло 15, повышению давления здесь до прежних величин, несмотря на повышение расхода воздуха через отверстие 19.
При уменьшении объемного расхода воздуха через отверстие 19 в процессе транспоpтирования детали 13 (например, в результате попадания в отверстие посторонних частиц) происходит уменьшение скорости воздушного потока через зазор между профильным диском 10 и изделием 13. Это приводит к увеличению давления в горле 15, а следовательно, и в соединенной с ним отверстиями 12 замкнутой камере 11 сильфона 9. Под действием увеличения давления в камере 11 сильфон 9 растягивается и тем самым уменьшает площадь проходного сечения зазора между диском 10 и изделием 13. В результате скорость воздушного потока через горло 15 увеличивается, а давление в нем уменьшается до прежних величин, несмотря на уменьшение объемного расхода воздуха через отверстие 19.
Таким образом происходит повышение эффективности работы предлагаемого вакуумного захвата за счет саморегулирования скорости и давления воздуха в зазоре между диском и поверхностью изделия при переменных объемных расходах через отверстие в изделии. При этом выполнение диска 10 с профилем Вентури позволяет увеличить точность саморегулирования скорости воздушного потока и устранить вызывающие помехи вихреобразования в потоке воздуха за счет наличия плавных переходов конфузора и диффузора на входе и выходе горла.
Сравнительный анализ предлагаемого устройства с устройством-прототипом показывает, что предлагаемое устройство обладает следующими техническими преимуществами:
расширенными функциональными возможностями за счет захватывания произвольно ориентированных в пространстве изделий, за счет возможности их транспоpтирования по сложной пространственной траектории, включающей опрокидывания и повороты, а также за счет захватывания изделий не только с плоской с отверстиями поверхностями;
повышенной эффективностью работы за счет осуществления саморегулирования скорости и давления воздуха в зазоре между профильным диском и плоской поверхностью изделия при переменных объемных расходах через отверстие в изделии;
упрощенной конструкцией, сниженным весом и стоимостью из-за уменьшения количества перемещающихся с трением и склонных к заклиниванию элементов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТЕЙ | 1990 |
|
RU2080812C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ГЛАДКИХ ПОВЕРХНОСТЕЙ | 1990 |
|
RU2080811C1 |
| ВАКУУМНЫЙ ЗАХВАТНЫЙ КОРРЕКТИРУЮЩИЙ МОДУЛЬ | 2009 |
|
RU2431561C2 |
| Пневматическое устройство для отделения и подачи плоских изделий из стопы | 1987 |
|
SU1546250A1 |
| ВАКУУМНЫЙ ЗАХВАТ | 1990 |
|
RU2091208C1 |
| Вакуумный захват | 1988 |
|
SU1523515A1 |
| Вакуумный схват | 1989 |
|
SU1763174A1 |
| ДОИЛЬНЫЙ АППАРАТ | 2012 |
|
RU2493696C1 |
| Устройство для сортировки плоских предметов | 1983 |
|
SU1169759A1 |
| ДОИЛЬНЫЙ АППАРАТ | 2013 |
|
RU2524542C1 |
Использование: для захвата, транспортирования и последующей укладки деталей, имеющих плоские или плоские с отверстиями поверхности. Сущность изобретения: устройство содержит корпус 1 с рабочей полостью 2, связанной с вакуумным насосом. В рабочей полости расположены пружины 4, размещенные между направляющими 5 корпуса и направляющими 6 плоского диска 7, расположенного параллельно плоскости губок 8 и на расстоянии от нее. Упругий элемент может быть выполнен также в виде сильфона, расположенного между корпусом 1 и диском с образованием дополнительной камеры. 1 з.п. ф-лы, 4 ил.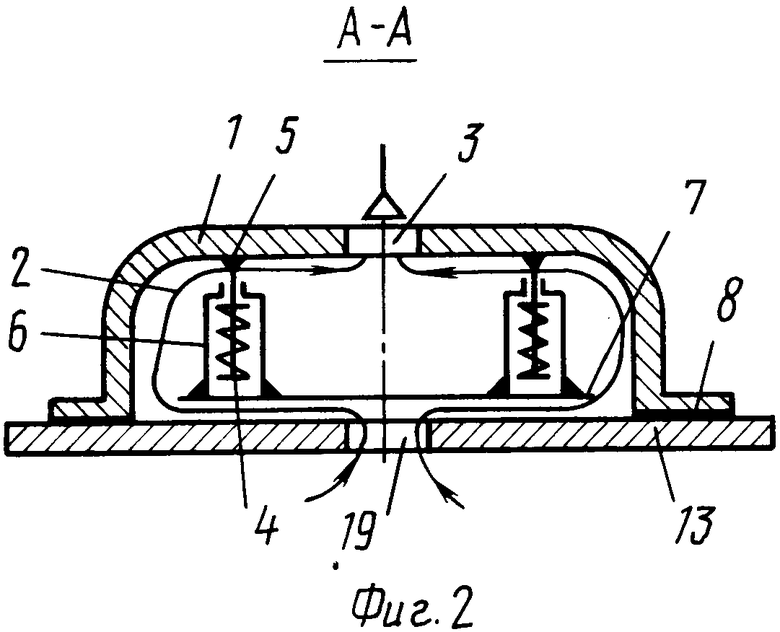
| Вакуумный захват | 1980 |
|
SU946921A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
