Изобретение относится к контрольно-измерительной технике и может быть использовано для автоматического контроля и измерения параметров функциональных элементов и схем.
Известно устройство для контроля интегральных схем, содержащее вычислительную, машину, блок ввода, блок управления, анализаторы, соединенные с выводами контролируемой интегральной схемы, блок опорных воздействий, генерат(эр, формирователь сигналов и цифровой вольтметр l.
В известном устройстве посредством анализаторов задаются испытательные воздействия на испытуемую схему и контролируются значения выходных параметров, снимаемых с выводов испытуемой сз4емы. Однако это устройство имеет низкую достоверность контроля из-за погрешностей преобразования и измерения контролируемых параметров.
Наиболее близким техническим решением к предлагаемому является дискретная система автоматического контроля и измерения параметров, содержащая блок формирования испытательных сигналов, коммутаторы, промежуточные преобразователи контролируемых параметров, аналого-цифровой преобразователь, блок сопоставления, логический блок, устройство выдачи результатов.измерения, блок вывода, блок самопроверки, блок уп равления, блок формирования эталонных сигналов 2.
В известном устройстве блок сопоставления анализирует разность кодов, соответствуюцщх эталонному сигналу, сформированному блоком формирования эталонных сигналов, и контролируемому параметру, подаваемых 15 по общему тракту, поэтому аддитив. ные погрешности промежуточного преобразования и кодирования вычитаются. Однако в этом случае достоверность контроля и точность измерения
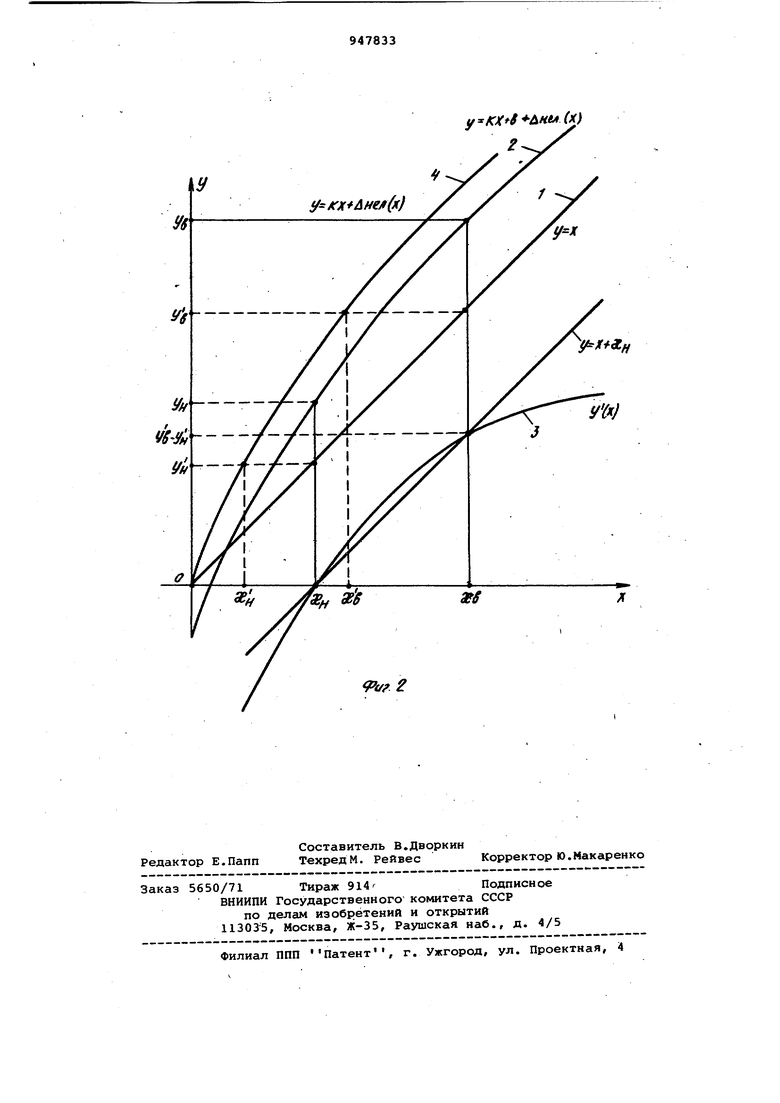
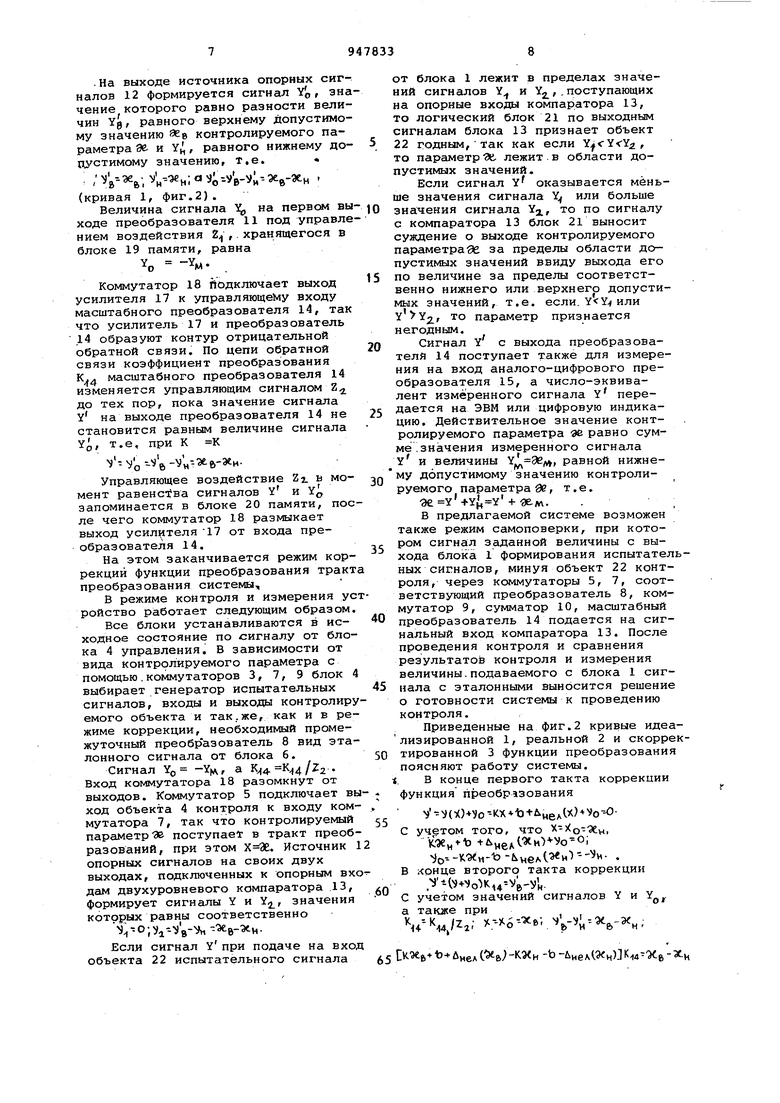
20 недостаточны, так как на результаты контроля и измерения значительное влияние оказывают мультипликативная составлякяцая погрешности и погрешность нелинейности промежуточных преобразований, возникающая из-за того, что преобразование тестового сигнала и контролируемого параметра происходит в разных точках динамической характеристики тракта преобразования и измерения. Цель изобретения - повышение достоверности контроля и точности измерения параметров. Поставленная цель достигается те что в устройство для контроля и измерения параметров, содержащее блок формирования испытательных сигналов соединенный выходами с входами перв го коммутатора, подключенного выходом к входу объекта контроля, вто--рой коммутатор, соединенный выходами через соответствующие первые масштабные преобразователи с первыми входами третьего коммутатора, ло гический блок и аналого-цифровой пр образователь, соединенные выходами с первым и вторым выходами устройст ва соответственно, управляющие вход блока формирования испытательных сигналов, первого, второго, третьего коммутаторов логического блока и блока формирования эталонных сигналов соединены с соответствующими вы ходами блока управления, введены второй и третий масштабные преобразователи, сумматор, первый и второй блоки памяти, источник опорных сигналов, блок вычитания, усилитель, четвертый и пятый коммутаторы и двухпороговый компаратор, соединенный выходами с входами логического блока, первым входом - с выходом вт рого масштабного.преобразователя и первым входом блока вычитания, вторым и третьим входами - с соответствующими первым и вторым выходами источника опорных сигналов, подключенного третьим-выходом к второму входу блока вычитания, выход которого соединен через усилитель с пер вым входом четвертого коммутатора, подключенного первым выходом к. первому входу первого блока памяти и первому входу третьего масштабного преобразователя, соединенного вторым Входом с четвертым выходом источника опррных сигналов, выходом с первым входом сумматора, соединенного вторым входом с выходом третьего коммутатора, выходом с первым входом второго масштабного преобразователя, второй вход которого подключен к второму выходу чет вертого коммутатора и первому входу второго блоки памяти, соединенного управляющим входом с выходом блока управления, соединенным соотве.тствующими выходами с соответствующими управляющими входами второго бло ка памяти, источника опорных сигналов и четвертого коммутатора, выход пятого коммутатора соединен с входом второго коммутатора, первый вход - с вторым выходом первого ком мутатора, второй вход - с выходом объекта контроля, третий вход - с выходом блока формирования эталонных сигналов. На фиг.1 приведена блок-схема устройства; на фиг,2 - обобщенные кривые функции преобразования устройства. Устройство содержит блок 1 формирования испытательных сигналов, включающий источники испытательных воздействий (генераторы). 2, первый коммутатор 3, блок 4 управления, пятый коммутатор 5, блок б формирования эталонных сигналов, второй коммутатор If первые масштабные преобразователи 8, третий коммутатор 9, сумматор 10, третий масштабный преобразователь 11, источник 12 опорг ных сигналов, двухпороговый компаратор 13, второй масштабный преобразователь 14, аналого-цифровой преобразователь 15, блок 16 вычитаний, усилитель 17, четвертый коммутатор 18, первый 19 и второй 20 блоки памяти, логический блок 21, обьект 22 контроля соединен входами с выходами первого коммутатора, а выходами с вторыми входами пятого коммутатора. На фиг.2 изображены следующие функции преобразования устройства; 1- идеализированная функция преобразования; 2 - реальная функция преобразования тракта преобразования; 3 - скорректированная в результате действий системы функция преобразования системы для контроля и измерения параметров; 4 - функция пре- . образования, по которой происходит преобразование параметров в системе-прототипе . Устройство работает следующим образом. Функция преобразования тракта преобразования, состоящего из коммутаторов 5, 7, 9 и преобразователей 8, в общем виде имеет вид кривой 2(фиг.2) и описывается функцией вида Y(X) КХ+Ы-д„еА()г где X и У - входной и выходной сигналы тракта преобразования;К - коэффициент, характеризующий линейную составляющую функции преобразования;b - начальное (нулевое) смещение функции преобразования, аддитивная составляющая погрешности преобразования; ,(Х)- нелинейная составляющая функции преобразования зависимости от входного сигнала. Годность контролируемого объекта 22 определяют по величине преобразованного сигналаЗК объекта 22, возбуждаемого испытательными сигналами, поступающими на вход объекта 22 от блока I формирования испытательных сигналов. Необходимо, чтобы значение контр лируемого параметра Зе объекта 22 пр возбуждении от одного из генераторо 2 испытательных сигналов находилось в пределах нижнего 0ен и верхнего ate допустимых значений, т.е. если при контроле выполняется условие ж-н ае ае то параметр принимается годным, в противном случае - негодным. Суждение о годности объекта контроля производится в предлагаемой системе по значению преобразованног системой . Система работает в двух режимах: режиме коррекции функции преобразования тракта преобразования и режиме контроля и измерения. В зависимости от вида контролируемого параметра блок 4 управления выбирает с помощью коммутаторов 3, 7, 9 генератор 2.испытательных сиг налов, входы и выходы контролируемого объекта 22, преобразователь 8, эталонный сигнал, формируемый блоком б формирования эталонных сигналов. Блок б формирует эталонные сигналы в Зависимости от вида контролируемого параметра Эе объекта 22 контроля. Источник 12 опорных сигналов формирует опорные сигналы в соответствии с видом выходных сигна лов Y тракта преобразования. Режим коррекции функции преобраз вания тракта преобразований осущест вляется в два такта. В первом такте блок 4 с помощью коммутаторов 7, 9 выбирает необходимый для преобразования контролируемого параметра преобразователь 8 а также устанавливает с помощью блока б формирования эталонных сигналов вид эталонного сигнала Хв, физически однородный контролируемому параметру зе- Коммутатор 5 подключает выход блока б формирова- ния эталонных сигналов к входу коммутатора 7. В начальный момент вход коммута тора 18 отключен от выходов. Источник опорных сигналов 12 формирует на своем выходе, подключенном к мас штабному преобразователю 11, нулевой сигнал, следовательно, сигнал YO на выходе преобразователя 11 равен нулю, т.е. Y О Коэффициент преобразования К масштабного преобразователя 14 равен единице, т.е. 1. На одном из двух других выходов источника 12, соединенных с двумя входами компаратора 13, фор мируется сигнал , а на втором сигнал Т, значение которого заведомо больше значения сигнала Y, пре,образованного трактом преобразовани входного сигнала X, значение которого равно нижнему допустимому значению ае.ц контролируемого параметрааг . Елок б формирования эталонных сигналов формирует эталонный сигнал Хд, значение которого равно нижнему допустимому значениюSEfl контролируемого параметра , т.е., X XQ аЕи, где X - сигнал на входе тракта преобразований. Преобразованный трактом преобразог ваний сигнал У через сумматор 10, масштабный преобразователь 14 поступает на сигнальный вход компаратора 13. В зависимости от того, больше или меньше нуля значение Yj, , преобразованного трактом преобразования сигнала , блок 4 управления формирует в дальнейшем знак опорного сигнала на первом выходе источни-т ка 12 опорных сигналов, соединенном с преобразователем 11. Если , то формируется опорный сигнал отрицательной полярности, если - положительной. Пусть (фиг.2) значение Y, соответствующее кривой 2 реальной функции преобразования тракта преобразования, больше нуля, т.е. . Тогда на выходе источника 12 формируется опорный сигнал определенной величины отрицательной полярности. Коммутатор 18 подключает выход усилителя 17 к управляющему входу масштабного преобразователя 11, так что усилитель 17 и преобразователь 11 образуют контур отрицательной обратной связи. На выходе источника опорных сигналов 12, соединенном с входом блока 16 формируется сигнал YO , равный нулю, т.е. . Коэффициент передачи масштабного преобразователя 11, управляемого коммутатором 18, изменяется до тех пор, пока сигнал Y, равный разности сигналов у тракта преобразования и сигнала Х преобразователя 11, не становится равным нулю, т.е. Y . При этом значение сигнала Y на выходе масштабного преобразователя 11 равно значению Уц и противоположно ему по знаку, т.е. YO -YH. Управляющее воздействие 2 в момент равенства YO -Y запоминается в блоке 19 памяти, а коммутатор 18 размыкает выход усилителя 17 от входа преобразователя 11. Во втором такте коррекции блок 6 формирования эталонных сигналов формирует на своем выходе сигнал Х, значение которого равно величине верхнего допустимого значения ЗЕ-в контролируемого параметра , т.е. X Хо . На выходе источника опорных сигналов 12 формируется сигнал УО , зна чение которого равно разности величин Yg, равного верхнему допустимо му значению в контролируемого параметра эе. и Y, равного нижнему до дустимому значению, т.е. « .M- H;« --VB-v;--9eg-9tH . (кривая 1, фиг.2). Величина сигнала 1 на первом вы ходе преобразователя 11 под управле нием воздействия 2,.хранящегося в блоке 19 памяти, равна -YM. Коммутатор 18 Подключает выход усилителя 17 к управляющему входу масштабного преобразователя 14, так что усилитель 17 и преобразователь 14 образуют контур отрицательной обратной связи. По цепи обратной связи Коэффициент преобразования К масштабного преобразователя 14 изменяется управляющим сигналом Z до тех пор, пока значение сигнгша Y на выходе преобразователя 14 не становится равным величине сигнала YO, т.е, при К К -Уо-Л- «-Э«-е -эеи. Управляющее воздействие Z в момент равенства сигналов Y и Y запоминается в блоке 20 памяти, пос ле чего коммутатор 18 размыкает выход 17 от входа преобразователя 14. На этом заканчивается режим коррекции функции преобразования тракт преобразования системы, В режиме контроля и измерения ус ройство работает следующим образом Все блоки устанавливаются в исходное состояние по сигналу от блока 4 управления. В зависимости от вида контролируемого параметра с помощью,коммутаторов 3, 7, 9 блок выбирает генератор испытательных сигналов, входы и выходы контролиру емого объекта и так.же, как и в ре жиме коррекции, необходимый промежуточный преобразователь 8 вид эта лонного сигнала от блока 6. Сигнал YO -Yf, а Kx4.. Вход коммутатора 18 разомкнут от выходов. Коммутатор 5 подключает в ход объекта 4 контроля к входу ком мутатора 7, так что контролируемый параметр Эв поступает в тракт преоб разований, при этом . Источник опорных сигналов на своих двух выходах, подключенных к опорным вх дам двухуровневого компаратора .13, формирует сигналы Y и Yji, значения которых равны соответственно S:,0;Vi--Vg-%-3eB-9tv,. Если сигнал Y при подаче на вхо объекта 22 испытательного сигнала от блока 1 лежит в пределах значений сигналов Y и Yj,. поступающих на опорные входы компаратора 13, то логический блок 21 по выходным сигналам блока 13 признает объект 22 годным, Так как если , то параметр 3 лежит . в области допустимых значений. Если сигнал Y оказывается меньше значения сигнала Х или больше значения сигнала Y, то по сигналу с компаратора 13 блок 21 выносит суждение о выходе контролируемого параметраае за пределы области допустимых значений ввиду выхода его по величине за пределы соответственно нижнего или верхнего допустимых значений, т.е. если. или Y . параметр признается негодным. Сигнал Y с выхода преобразователя 14 поступает также для измерения на вход аналого-цифрового преобразователя 15, а число-эквивалент измеренного сигнала Y передается на ЭВМ или цифровую индикацию. Действительное значение контролируемого параметра эе равно сумме, значения измеренного сигнала Y и величины , равной нижнему допустимому значению контролируемого параметрами, т.е. ,Y+ де-м. . в предлагаемой системе возможен также режим самоповерки, при котором сигнал заданной величины с выхода блока 1 формирования испытательных сигналов, минуя объект 22 контроля, через коммутаторы 5, 7, соответствующий преобразователь 8, коммутатор 9, сумматор 10, масштабный преобразователь 14 подается на сигнальный вход компаратора 13. После проведения контроля и сравнения результатов контроля и измерения величины.подаваемого с блока 1 сигнала с эталонными выносится решение о готовности системы к проведению контроля. Приведенные на фиг.2 кривые идеализированной 1, реальной 2 и скорректированной 3 функции преобразования поясняют работу системы. . В конце первого такта коррекции функция преобразования y-V(T()Vo--KX bt Hg U)Vo--0С учетом того, что - о-Эе ч, ( -л„еА о° .-Кэгн-Ъ-ь.) . в конце второго такта коррекции .Hv io-JKu B-v. с учетом значений сигналов Y и Y а также при г . i к б+Ъ+йцел(.5 ь;-КЭ н-b-йнеА.9«н) ч4-Хб-Хц :кеХв-у,-)лнел.Xэ€в))Зl 14-l г ;эc6-«:н. При этом коэффициент преобразова ния преобразователя 14 становится равным Э ь-Э«-и ..--K.jz, КСэ в-Нц)+л„елСэСь)-й„елСЭ«-ц) В режиме контроля и измерения с уче том значений сигнала YO -YH и коэф фициента преобразования 4 . преобразователя 14 и того, что , зависимость сигнала Y от контролируемого параметра Эе описйвается ура нением ytX)--ts(.Cvex)-Vv,.; .. ;-Ч . . у too-LK-x-H-b+uueA Сзг-)-КгСн-Ь-Ду елСЭ«-н)3 Хь-ЭСу, КСХб--х„|+4 „еАСэев)-йиелСЭ(н) Действительное значение контроли руемого параметра at- с-ХК-эгм-Iкэe иe Сад-к-осн-йнел(эен) Хь-Хи : )+Ьиел 1Хь)-Ьиел Э и) при X , у (9Ьн о, X , Y -afo Таким образом, скорректированная функция преобразования системы Y(ае) проходит через точку У.„;0 и точку aeg,; () и пересекается в этих точках с кривой устройстве-прототипе с того, что устраняется аддитивная составляющая погрешности функции преобразования тракта преобразования, преобразовавшие контролируемого параметра ЗС происходит по кри.вой 4 (фиг.2). Таким образом, на fдостоверность контроля и точность измерения значительное влияние оказывают мультипликативная и нелинейная составляющие погрешности функции преобразования, в. результате чего годными признаются параметры, находящиеся в пределах ,аев вместо требуемых -ЗС ;-Эеg В предлагаемой системе годность параметра Х- определяют по нахожден сигнала Y в пределах 0; (Yg-Y/,) , что соответствует нахождению контролируемого параметра ЭС в требуемы пределах зецуэе . При этом точност измерения вблизи граничных точек, определ/яющих пределы допустимых зн чений контролируемого параметра е, значительно повышается, из-за умень шения мультипликативной и нелинейн составляющих погрешности преобразо вания контролируемого параметра вблизи-этих точек. Таким образом, в предлагаемой системе достоверность контроля повышается за счет исключения влияния мультипликативной и нелинейной составляющей погрешности преобразования тракта преобразования на результаты контроля, а также повышается точность измерения контролируемых параметров вблизи граничных точек, определяющих пределы допустимых значений из-за уменьшения мультипликативной и нелинейной составляющих преобразования в окрестностях этих точек. Графическая интерпретация действий предлагаемой системы в режиме коррекции заключается в следующем. В первом такте коррекции кривая 2 функции преобразования смещается по оси ординат на величину YH так, чтобы точка кривой сместилась в точку эец;0. Затем во втором такте осуществляется поворот кривой вокруг точки с координатами Эен, 0 до пересечения кривой с точкой с координатами e.f,; (eeg-gcn), в результате чего кривая 2 трансформируется в кривую 3. Формула изобретения Устройство для контроля и измерения параметров, содержащее блок формирования испытательных сигналов, соединенный выходами с входами первого коммутатора, подключенного выходом к входу объекта контроля, второй коммутатор, соединенный выходами через соответствующие первые масштабные преобразователи с первыми входами третьего KONMyTaTopa/ .логический блок и аналого-цифровой преобразователь, соединенные выходами с первым и вторым выходами устройства соответственно, управляющие входы блока формирования испытательных сигналов первого, второго, третьего коммутаторов, логического блока и блока формирования эталонных сигналов соединены с соответствующими выходами блока управления, отличающеес я тем, что, с целью повышения точности измерений и повышения достоверности контроля, в устройство введены второй и третий масштабные преобразователи, сумматор, первый и второй блоки памяти, источник опорных сигналов, блок вычитания, усилитель, четвертый и пятый коммутаторы и двухпороговый компаратор, соединенный выходами с входами логического блока, первым входом - с выходом второго масштабного преобразователя и первым входом блока вычитания, вторым и третьим входами с соответствующими первым и вторым
выходами источника опорных сигналов, подключенного третьим выходом к второму входу блока вычитания, выход которого соединен через ус-илитель с первым входом четвертого коммутатора, подключенного первым выходом к первому входу, первого блока памяти и первому входу третьего масштабного преобразователя,соединенного вторым входом с четвертым выходом источника опорных сигналов, выходом - с первым входом сумматора, соединенного вторым входом-с выходом третьего коммутатора, выходом - с первым входом второго масштабного преобразователя, второй вход которог подключен к второму выходу четвертого коммутатора и первому входу второго блока памяти, соединенного управляющим входом с выходом блока управления, соединенным соответствующими выходами с соответствующими управляющими входами второго блока памяти, источника опорных сигналов, четвертого .коммутатора, выход пятого коммутатора соединен с входе второг .коммутатора, первый вход - с вторым выходом первого коммутатора, второй вход - с выходом объекта контроля, третий вход - с выходом блока формирования эталонных сигналов. Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 419852, кл. G 05 В 23/02, 1974.
2.Авторское свидетельство СССР № 316092, кл. G Об F 15/46, 1972 (прототип).
y / Jftf-t- HtAM

| название | год | авторы | номер документа |
|---|---|---|---|
| Система контроля параметров | 1984 |
|
SU1190364A1 |
| Устройство для контроля аналоговых объектов | 1989 |
|
SU1718189A1 |
| Устройство для контроля параметров линейных интегральных схем | 1981 |
|
SU1030748A1 |
| Способ определения параметров передаточной функции линейного динамического звена и устройство для его осуществления | 1986 |
|
SU1377826A1 |
| Устройство многопараметрового контроля физико-механических показателей ферромагнитных изделий | 1984 |
|
SU1379711A1 |
| Устройство контроля цифро-аналоговых преобразователей | 1980 |
|
SU949801A1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2004 |
|
RU2263328C1 |
| ДИСКРЕТНАЯ СИСТЕМА АВТОМАТИЧЕСКОГО КОНТРОЛЯ И ИЗМЕРЕНИЯ ПАРАМЕТРОВ | 1971 |
|
SU316092A1 |
| Способ измерения относительной величины удельной электрической проводимости электропроводящих изделий и устройство для его осуществления | 1986 |
|
SU1374120A1 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ СОСТОЯНИЯ АППАРАТУРЫ ЦИФРОВЫХ СИСТЕМ ПЕРЕДАЧИ | 1998 |
|
RU2132594C1 |