1
Изобретение относится к области сельскохозяйственного производства, в частности, котрасли механизации работ в садоводстве по уборке плодов 14 уходу за кроной деревьев.
Известна платформа для сбора плодов и обрезки кроны плодовых деревьев, содержащая площадку с выдвиж.ными трапами, установленными с образованием в выдвижном положении СПлош- о ного настила в зоне между площадкой и скелетными ветвями дерева и механизм их привода llj.
Недостатком этой платформы является то, что сбор плодов и обрезка де- 15 ревьев осуществляется только с настила, образованного трапами, как слева так и справа. Внедряемость трапов в крону дерева очень ограничена и сбор .(обрезка) осуществляется только 20 в зоне одного яруса. В случае использования платформы в садах, где высота деревьев ограничивает возможность использования платформы, происходит
снижение полноты сбора и качества обрезки. Это усугубляется в сильнорослых садах. Здесь следует отметить, что плоды с хорошими товарными качествами расположены на верхних ветвях и по периферии.
Целью изобретения является повьше ние производительности труда при сборе плодов и обрезке кроны.
Это достигается тем, что платформа снабжена установленными на концах трапов подъемниками для сборщиков. А также, что на площадке установлен рольганг для перемещения контейнеров, а впереди платформы установлена переходная площадка, причем механизм привода трапов выполнен в виде закрепленной вдоль каждого трапа цепи, взаимодействующей со звездочкой, новленной на валу привода.
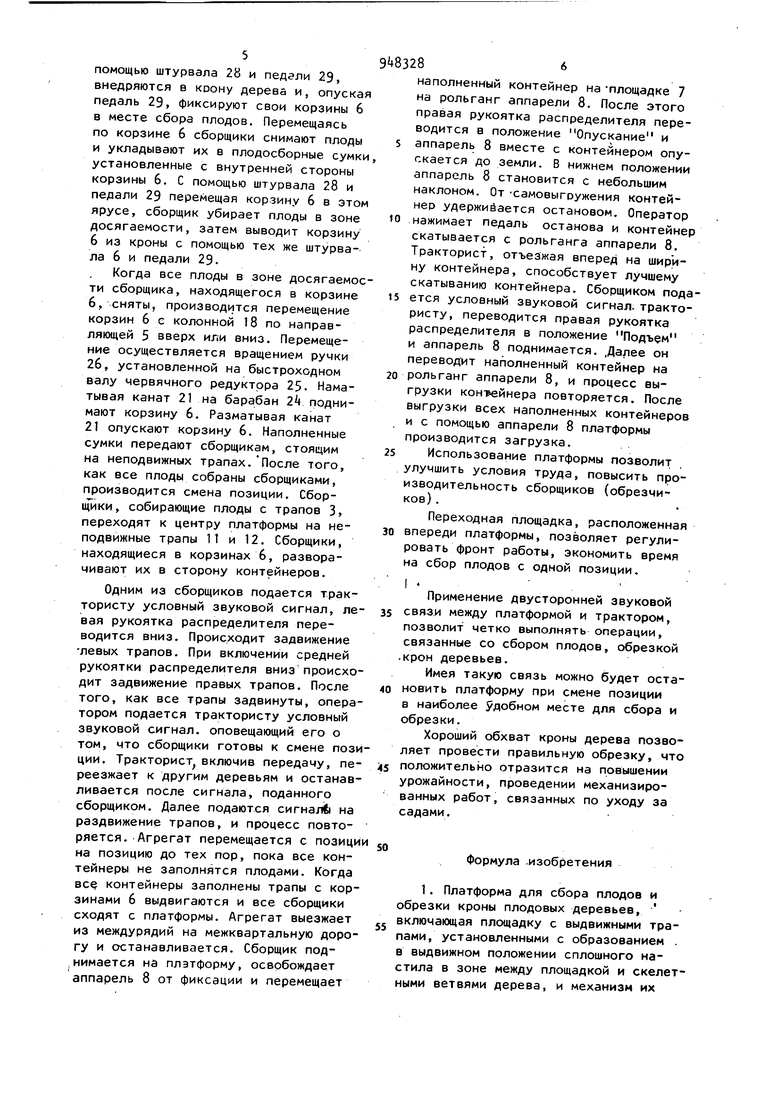
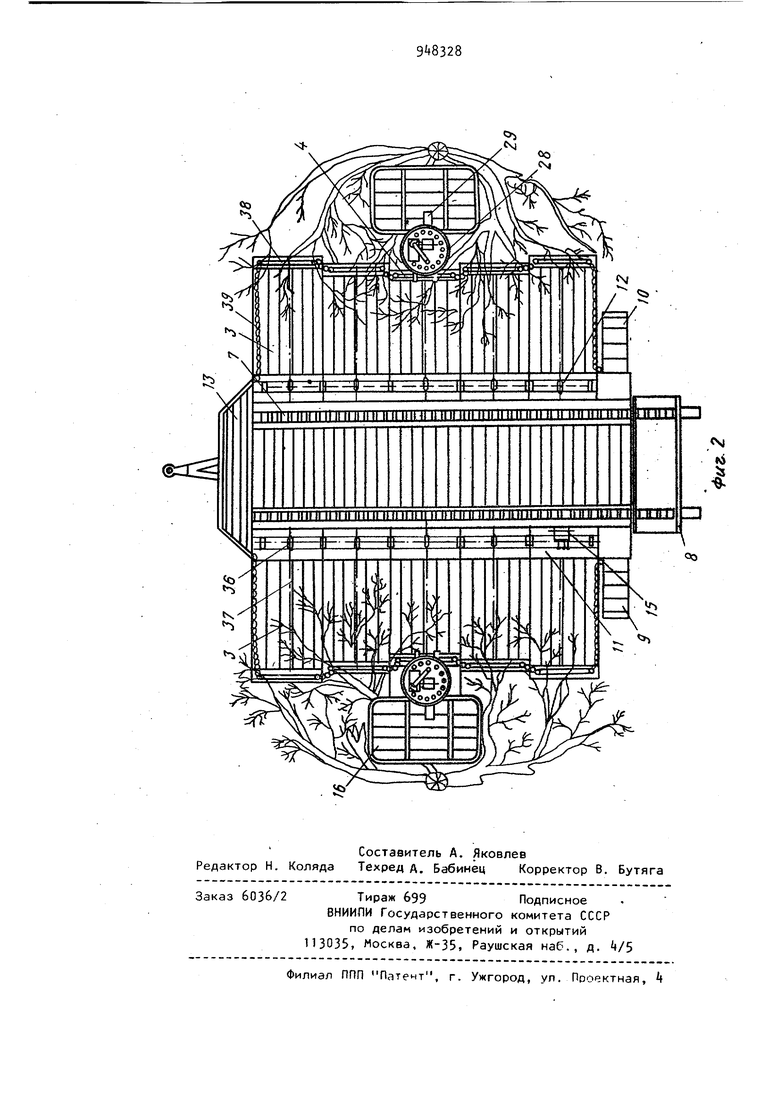
На фиг, 1 изображена платформа для сбора плодов и обрезки крон плодовых деревьев, вид сзади в рабочем поло4жении; на фиг. 2 - то же, вид в плане в рабочем положении. Платформа для сбора плодов и обре ки кроны деревьев состоит из шасси рамы 2, выдвижных трапов 3. К средни трапам 4 при помощи двух пар болтов крепится направляющая 5, внутри кот торой перемещается колонка с корзиной 6. По центру платформы имеется площадка 7 для установки контейнеров выполненная из двух пар уголков и роликов с осями. Сзади платформы установлена аппарель 8 (механизм подъема и опускания контейнеров). Платформа имеет справа и слева лестницы 9 и 10 для подъема на неподвижные трапы 11 и 12 сборщиков обрезчиков Спереди платформы установлена переходная площадка 13. Для предотвращения повреждения веток выдвижные трапы 3 и t спереди обрезинены. На платформе установлена двусторонняя звуковая связь 1 между трактористом и сборщиками (обрезчиками). Выдвижение трапов 3, опускание и под ем аппарели 8 механизированны от гид ропривода , питающегося от гидросисте мы трактора. Управление осуществляется рукоятками распределителя. Распределитель 15 установлен на стойках приваренных к раме 2. Корзина 6 представляет собой металлическую конструкцию сварного и болтового соединения с деревянным настилом 16 на дне. Корзина 6 при помощи кронштейна 17 консольна, закреплена на колонне 18 и свободно вращается вокруг последней на подшип никах качения. Направляющая 5 при помощи ушек 19, и кронштейна 20 крепится к среднему трапу k. Канат 21 одним концом заделанный в направляющей 5 огибает блок 22, проходит внутри трубы (колонны) 18, огибая ролик, установленный на пальце 23, вторым концом крепится к барабану 24, который жестко закреплен при помощи шпонки и стопорного.болта на тихоходном конце вала червячного редуктора 25. На быстроходный конец вала червячного редуктора 25 закреплена ручка 2б. В корзину 6 вмонтирована лестница 27, штурвал 28 для вращения корзины и педатль 29. Механизм перемещения трапов выполнен для ка-ждой стороны раздельно. Состоит из мотор-насоса 30, редуктора 31, звездочки 32, приводной цепи 33, звездочки 3 и вала 35. Вал многоопорный 35 состоит из пяти частей, концы которых соединяются муфтами и устанавливаются в опорные подшипники. Напротив центров выдвижных трапов на каждом валу установлена звездочка 36 на подшипнике скольжения. Звездочка 36 постоянно находится в зацеплении с цепью 37. Цепь 37 крепится к трапу одним концом жестко, а другим че|эез регулировочный болт. На концах трапов 3 и k установлены перила 38 и ограждающие цепи 39. Платформа работает следующим образом. Платформа устанавливается между деревьями. Сборщики, поднявшись на платформу, встают по три-четыре человека на каждую сторону. Число сборщиков определяется урожайностью сада. Два-три сборщика располагаются на неподвижных трапах 11, 12. Один сборщик поднимается в корзину. 6 при помощи лестницы 27, вмонтированной в нее. Поднявшись, сборщик Поднимает лестницу 27, тем самым образуя замкнутый контур корзины 6. Подается условный звуковой сигнал и включается левая рукоятка гидрораспределителя 15; расположенного на платформе, в положение Выдвижение. Далее включается рукоятка тракторного гидрораспределителя и происходит выдвижение трапов 3 и 4, расположенных слева. При включении средней рукоятки распределителя 15 в йоложение Выдвижение происходит выдвижение правых трапов 3 и t. После полной остановки трапов рукоятки распределителя 15 переводятся в нейтральное положение. Механизм перемещения трапов работает следующим образом. Вращение от мотор-насоса 30 передается редуктору 31. От редуктора 31 через звездочку 32, приводную цепь 33 вращение передается на звездочку 34,установленную жестко на валу 35. Звездочки Зб, установленные на валу 35,находясь в постоянном зацеплении с цепями 37, перемещают трапы 3 и 4. Сборщики выходят на площадку, образованную выдвижными трапами 3,соединяют перила 38 ограждающими цепями 39 и производят сбор плодов. Плоды, собранные в плодосборные сумки, высыпают в порожние контейнеры, устаовленные по центру платформы. Сборики, находящиеся в корзинах 6, с ПОМОЩЬЮ штурвала 28 и педали 29, внедряются в коону дерева и, опуская педаль 29, фиксируют свои корзины 6 в месте сбора плодов. Перемещаясь по корзине 6 сборщики снимают плоды и укладывают их в плодосборные сумки установленные с внутренней стороны корзины 6. С помощью штурвала 28 и педали 29 перемещая корзину 6 в этом ярусе, сборщик убирает плоды в зоне досягаемости, затем выводит корзину 6 из кроны с помощью тех же штурвала 6 и педали 29. Когда все плоды в зоне досягаемос ти сборщика, находящегося в корзине 6, сняты, производится перемещение корзин 6 с колонной 18 по направляющей 5 вверх или вниз. Перемещение осуществляется вращением ручки 2б, установленной на быстроходном валу червячного редуктора 25- Наматывая канат 21 на барабан 2 поднимают корзину 6. Разматывая канат 21 опускают корзину 6, Наполненные сумки передают сборщикам, стоящим на неподвижных трапах.После того, как все плоды собраны сборщиками, производится смена позиции. Сбор1ЦЙКИ, собирающие плоды с трапов 3, переходят к центру платформы на неподвижные трапы 11 и 12. Сборщики, находящиеся в корзинах 6, разворачивают их в сторону контейнеров. Одним из сборщиков подается трактористу условный звуковой сигнал, ле вая рукоятка распределителя переводится вниз. Происходит задвижение -левых трапов. При включении средней рукоятки распределителя вниз происхо дит задвижение правых трапов. После того, как все трапы задвинуты, опера тором подается трактористу условный звуковой сигнал, оповещающий его о том, что сборщики готовы к смене поз ции. Тракторист включив передачу, пе реезжает к другим деревьям и останав ливается после сигнала, поданного сборщиком. Далее подаются сигналб на раздвижение трапов, и процесс повторяется. Агрегат перемещается с позиц на позицию до тех пор, пока все контейнеры не заполнятся плодами. Когда BCQ контейнеры заполнены трапы с кор зинами 6 выдвигаются и все сборщики сходят с платформы. Агрегат выезжает из междурядий на межквартальную доро гу и останавливается. Сборщик поднимается на платформу, освобождает аппарель 8 от фиксации и перемещает 86 наполненный контейнер на -площадке 7 на рольганг аппарели 8. После этого правая рукоятка распределителя переводится в положение Опускание и аппарель 8 вместе с контейнером опускается до земли. В нижнем положении аппарель 8 становится с небольшим наклоном. От -самовыгружения контейнер удержийается остановом. Оператор нажимает педаль останова и контейнер скатывается с рольганга аппарели 8. Тракторист, отъезжая вперед на ширину контейнера, способствует лучшему скатыванию контейнера. Сборщиком подается условный звуковой сигнал, трактористу, переводится правая рукоятка распределителя в положение Подъем и аппарель 8 поднимается. .Далее он переводит наполненный контейнер на рольганг аппарели 8, и процесс выгрузки кон1№йнера повторяется. После выгрузки всех наполненных контейнеров и с помощью аппарели 8 платформы производится загрузка. Использование платформы позволит улучшить условия труда, повысить производительность сборщиков (обрезчиков) . Переходная площадка, расположенная впереди платформы, позволяет регулировать фронт работы, экономить время на сбор плодов с одной позиции. Применение двусторонней звуковой связи между платформой и трактором, позволит четко выполнять операции, связанные со сбором плодов, обрезкой крон деревьев. Имея такую связь можно будет остановить платформу при смене позиции в наиболее рдобном месте для сбора и обрезки. Хороший обхват кроны дерева позволяет провести правильную обрезку, что положительно отразится на повышении урожайности, проведении механизированных работ, связанных по уходу за садами. Формула -изобретения 1. Платформа для сбора плодов и обрезки кроны плодовых деревьев, включающая площадку с выдвижными трапами, установленными с образованием . в выдвижном положении сплошного настила в зоне между площадкой и скелетными ветвями дерева, и механизм их
7
привода, отличающаяся тем, что, с целью повышения производительности труда при сборе плодов и обрезки кроны, она снабжена установленными на концах трапов подъемниками для сборщиков.
2.Платформа по п. 1, отличающаяся тем, что на площадке установлен рольганг для перемещения контейнеров.
3.Платформа по п. 1, отличающаяся тем, что впереди
83288
платформы установлена переходная площадка.
4. Платформа по п. 1, .отличающаяся тем, что механизм 5 привода трапов выполнен в виде закрепленной вдоль каждого трапа цепи, взаимодействующей со звездочкой, установленной на валу привода.
Источники информации, to принятые во внимание при экспертизе
1. Авторское свидетельство СССР W 496015, кл. А 01 D 46/24, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Платформа для сбора плодов и обрезки кроны деревьев | 1984 |
|
SU1214012A1 |
| Подъемная платформа для сбора плодов | 1980 |
|
SU946443A1 |
| Платформа для сбора плодов и обрезки кроны плодовых деревьев | 1979 |
|
SU858636A1 |
| Платформа для сбора плодов и обрезки кроны плодовых деревьев | 1980 |
|
SU934974A1 |
| ПЕРЕДВИЖНАЯ ПОДЪЕМНАЯ ПЛАТФОРМА ДЛЯ СБОРА ПЛОДОВ12 | 1973 |
|
SU387673A1 |
| Платформа для сбора плодов | 1982 |
|
SU1091879A1 |
| Подъемник | 1990 |
|
SU1754638A1 |
| Платформа для сбора плодов и обрезки кронов плодовых деревьев | 1972 |
|
SU496015A1 |
| Устройство для погрузки, разгрузки и перемещения оборудования | 2024 |
|
RU2827474C1 |
| ПОДЪЕМНОЕ УСТРОЙСТВО | 1998 |
|
RU2170602C2 |
Фкг. f
