(Ц) РУЛЕВОЕ УПРАВЛЕНИЕ ТРАНСПОРТНОГО СРЕДСТВА
| название | год | авторы | номер документа |
|---|---|---|---|
| КОЛЕСНАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2010 |
|
RU2423281C1 |
| ПОЛНОПРИВОДНОЕ КОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1992 |
|
RU2101206C1 |
| ПОЛНОПРИВОДНОЕ КОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2006 |
|
RU2362688C2 |
| Колёсно-гусеничное шасси транспортного средства повышенной проходимости | 2022 |
|
RU2787607C1 |
| Быстроходный двухосный колёсный вездеход на шинах сверхнизкого давления с комбинированной системой управления | 2017 |
|
RU2652936C1 |
| Малогабаритный трактор | 1990 |
|
SU1785922A1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |
| ТЯГОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 1999 |
|
RU2163209C1 |
| ПОЛНОПРИВОДНАЯ КОЛЕСНАЯ МАШИНА С ГИДРООБЪЕМНОЙ ТРАНСМИССИЕЙ | 2002 |
|
RU2245260C2 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
Изобретение относится к транспорт.ному машиностроению. Известно рулевое управление, включающее рулевой механизм и трансмиссию которая связывает рулевой механизм с каждым из колес транспортного средст ва, расположенных рядами и закрепленных на раме транспортного средства по средством стоек с возможностью поворота относительно вертикальной оси, и содержит приводные валы для каждого ряда колес,а также колесные редукторы l. Недостатком этого рулевого управле ния является то, что оно не может быть использовано для управления всеми колесами многоосных транспортных средств. Цель изобретения - повышение маневренности многоосных транспортных средств. Поставленная цель достигается тем, что в рулевом управлении транспортноjro средства, включающем рулевой механизм, трансмиссию, которая связывает рулевой механизм с каждым из колес транспортного средства, расположенных рядами и закрепленных на раме транспортного средства посредством стоек с возможностью поворота относительно вертикальной оси, и содержит приводные валы для каждого ряда колес, а также колесные редукторы, выходные валы которых соединены со стойками, между приводными валами и колесными редукторами установлены коробки передам с общим для коробок передач каждого ряда колес механизмом управления,, а каждый из колесных редукторов выполнен 8 виде червячной пары, колесо которой соединено со стойкой, а червяк - с выходным валом коробки передач,г Все коробки передач имеют нейтральное положение, положение при котором передаточные отношения всех
коробок передач одинаковы, и положег ние, при котором передаточное отношение каждой коробки передач установлено из условия обеспечения направления оси колеса в центр поворота, причем каждый приводной вал является общим для всех коробок передач одного ряда колес.
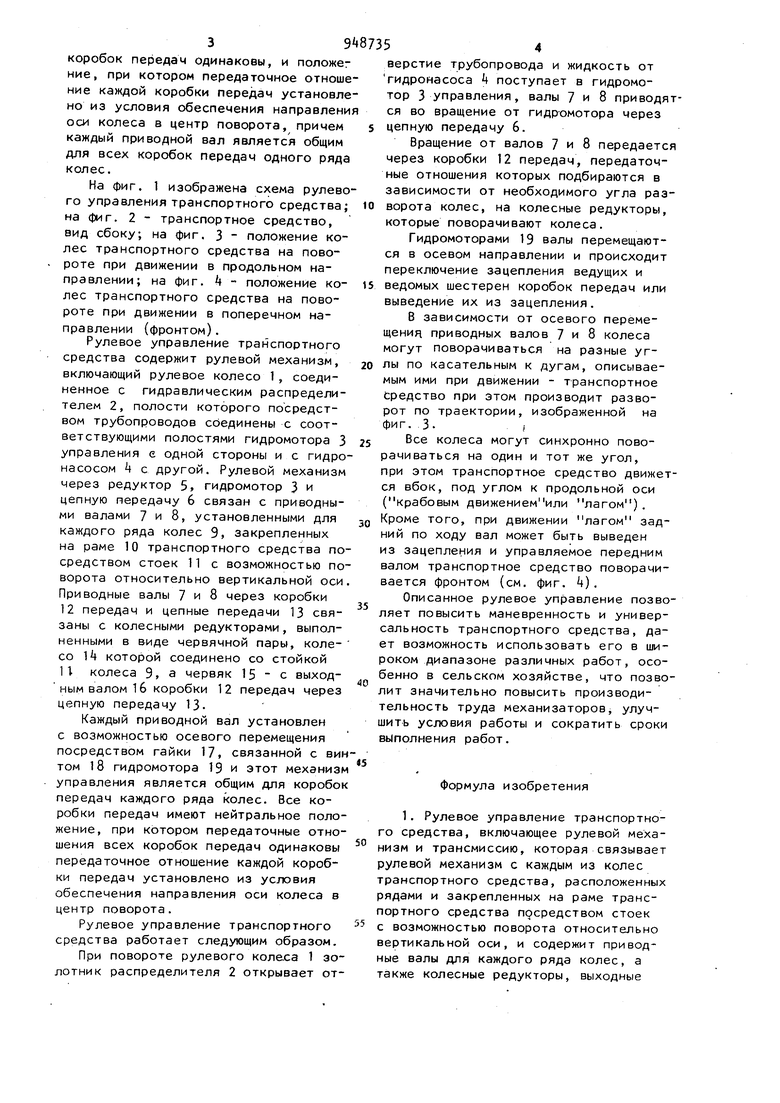
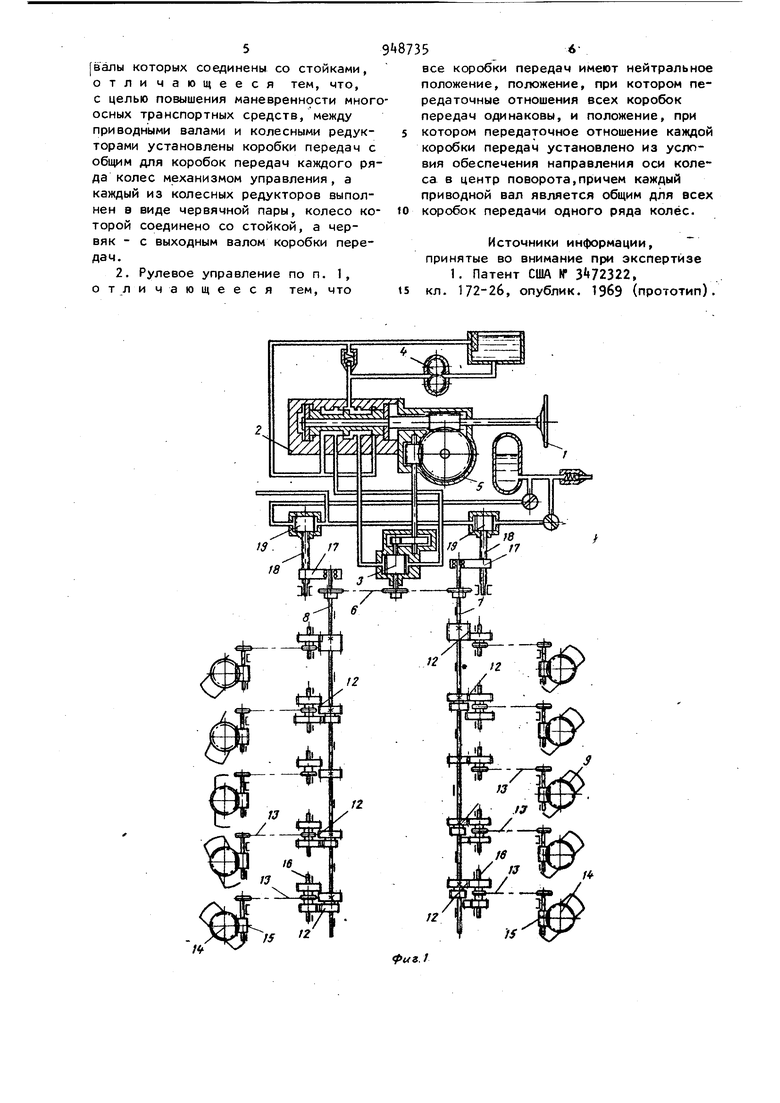
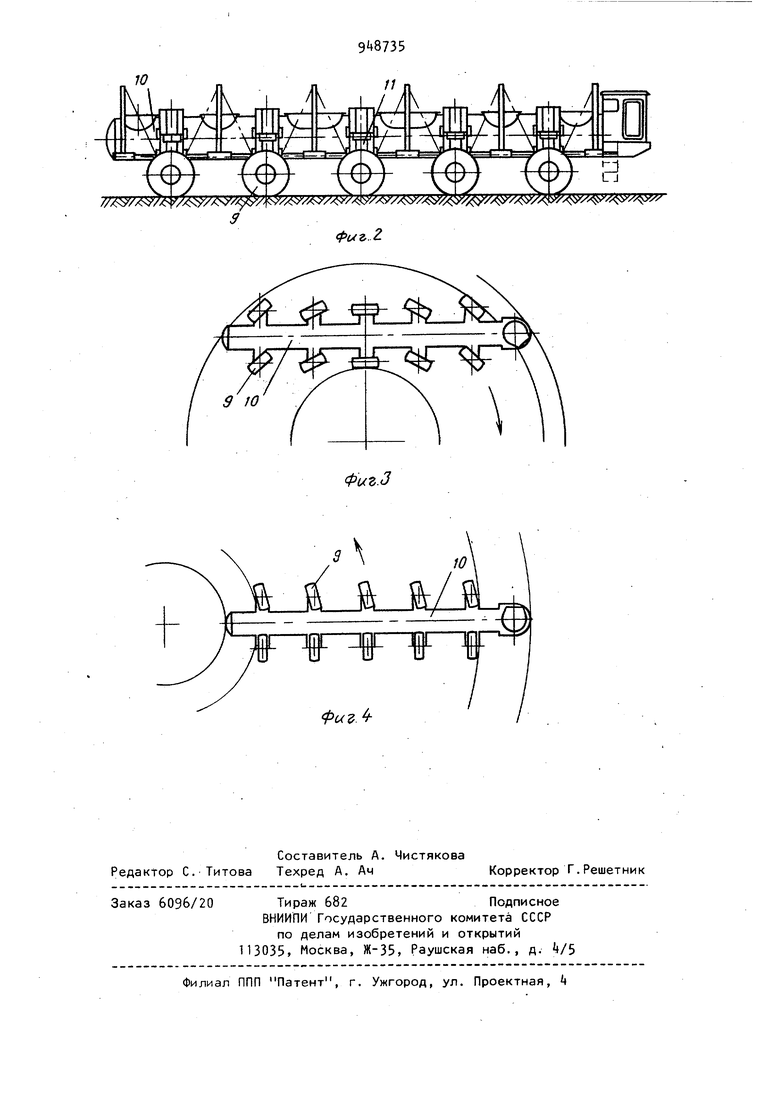
На фиг. 1 изображена схема рулевого управления транспортного средства; на фиг. 2 - транспортное средство, вид сбоку; на фиг. 3 - положение колес транспортного средства на повороте при движении в продольном направлении; на фиг. - положение колес транспортного средства на повороте при движении в поперечном направлении (фронтом).
Рулевое управление транспортного средства содержит рулевой механизм, включающий рулевое колесо 1, соединенное с гидравлическим распределителем 2, полости которого посредством трубопроводов соединены с соответствующими полостями гидромотора 3 управления е одной стороны и с гидронасосом k с другой. Рулевой механизм через редуктор 5, гидромотор 3 и цепную передачу 6 связан с приводными валами 7 и 8, установленными для каждого ряда колес 9 закрепленных на раме 10 транспортного средства посредством стоек 11 с возможностью поворота относительно вертикальной оси. Приводные валы 7 и 8 через коробки 12 передач и цепные передачи 13 связаны с колесными редукторами, выполненными в виде червячной пары, колесо 14 которой соединено со стойкой 11 колеса 9, а червяк 15 - с выходнымвалом1б коробки 12 передач через цепную передачу 13Каждый приводной вал установлен с возможностью осевого перемещения посредством гайки 17, связанной с винтом 18 гидромотора 19 и этот механизм управления является общим для коробок передач каждого ряда колес. Все коробки передач имеют нейтральное положение, при котором передаточные отношения всех коробок передач одинаковы передаточное отношение каждой коробки передач установлено из условия обеспечения направления оси колеса в центр поворота.
Рулевое управление транспортного средства работает следующим образом.
При повороте рулевого колеса 1 золотник распределителя 2 открывает отверстие трубопровода и жидкость от гидронасоса t поступает в гидромотор 3 управления, валы 7 и 8 приводятся во вращение от гидр-омотора через цепную передачу 6.
Вращение от валов 7 и 8 передается через коробки 12 передач, передаточные отношения которых подбираются в зависимости от необходимого угла разворота колес, на колесные редукторы, которые поворачивают колеса.
Гидромоторами 19 валы перемещаются в осевом направлении и происходит переключение зацепления ведущих и ведомых шестерен коробок передач или выведение их из зацепления.
В зависимости от осевого перемещения приводных валов 7 и 8 колеса могут поворачиваться на разные углы по касательным к дугам, описываемым ими при движении - транспортное Средство при этом производит разворот по траектории, изображенной на фи г. , 3 i
Все колеса могут синхронно поворачиваться на один и тот же угол, при этом транспортное средство движется вбок, под углом к продольной оси (крабовым движением или лагом). Кроме того, при движении лагом задний по ходу вал может быть выведен из зацепления и управляемое передним валом транспортное средство поворачивается фронтом (см. фиг. 4).
Описанное рулевое управление позволяет повысить маневренность и универсальность транспортного средства, дает возможность использовать его в широком диапазоне различных работ, особенно в сельском хозяйстве, что позволит значительно повысить производительность труда механизаторов, улучшить условия работы и сократить сроки выполнения работ.
Формула изобретения
валы которых соединены со стойками, отли чающееся тем, что, с целью повышения маневренности многоосных транспортных средств, между приводными валами и колесными редукторами установлены коробки передач с общим для коробок передач каждого ряда колес механизмом управления, а каждый из колесных редукторов выполнен а виде червячной пары, колесо которой соединено со стойкой, а червяк - с выходным валом коробки передач.
2, Рулевое управление по п. 1, отли чающееся тем, что
все коробки передач имеют нейтральное положение, положение, при котором передаточные отношения всех коробок передач одинаковы, и положение, при
котором передаточное отношение каждой коробки передач установлено из условия обеспечения направления оси колеса в центр поворота,причем каждый приводной вал является общим для всех
коробок передачи одного ряда колёс.
Источники информации, принятые во внимание при экспертизе
