Изобретение относится к движителям транспортных средств высокой проходимости, способным осуществлять движение в колесном режиме и в режиме колесного шагания, причем движение в колесном режиме может осуществляться с различным дорожным просветом.
Впервые принцип колесного шагания был практически реализован и запатентован в США в 60-е и 70-е годы прошлого века [1] для решения задачи повышения опорной и профильной проходимости транспортных средств, включая луноходы, при движении по неподготовленной местности, по слабо связным грунтам с низкой несущей способностью, типа песков и лунного реголита. Передвижение транспортных средств в режиме колесного шагания является способом адаптации колесного движителя к свойствам грунта, существенно повышающим опорную проходимость при преодолении подъемов и других участков местности со слабо связными грунтами, имеющими низкую несущую способность. Если механизмы шагания способны изменять относительное положение колес и корпуса не только в направлении движения, но и в перпендикулярном направлении, по вертикали, выполняя функции активной подвески, то это качество может быть использовано для адаптации транспортных средств к рельефу с целью повышения профильной проходимости.
Известен, например, колесно-шагающий движитель типа Го - девиль со встроенным в колесо тяговым приводом, образующими единый конструктивный агрегат мотор-колесо, отличающийся от колесного движителя тем, что продольные рычаги подвески, на которых установлены мотор - колеса, могут поворачиваться относительно корпуса машины на угол 360° с помощью собственного привода [2, 3]. Привод рычага подвески позволяет осуществлять своеобразное шагание, в процессе которого центр масс корпуса транспортного средства повторяет траекторию движения рычага. Это позволяет повысить проходимость транспортного средства за счет применения способа колесного шагания. Конструкция также предоставляет принципиальную возможность регулировать относительное положение колес и корпуса транспортного средства по вертикали. Транспортное средство образовано из двух шарнирно соединенных секций, что позволяет выполнить кинематический поворот только с радиусом, который превышает размер колеи. Однако такая конструкция ходовой части не позволяет выполнить ходовые колеса поворотными и осуществлять поворот транспортного средства с помощью рулевых механизмов. Еще одним недостатком такой конструкции является то, что при реализации колесного шагания центр масс корпуса транспортного средства совершает не только продольные, но и вертикальные перемещения, а отрыв даже одной опоры четырех колесного транспортного средства от опорной поверхности, резко снижает устойчивость от опрокидывания на косогорах.
Этот недостаток частично устранен в конструкции колесно-шагающего движителя [4], использованного в составе экспериментального макета транспортного средства высокой проходимости [5]. Макет состоит из двух секций, соединенных друг с другом механизмом с двумя степенями свободы, и четырех колесно-шагающих движителей, по два движителя на каждую секцию. Каждый движитель содержит мотор-колесо с гидромотором и двух рычажный, шарнирно сочлененный механизм шагания. Первый рычаг механизма шагания поворотно связан с корпусом транспортного средства, а второй поворотно связан с мотор-колесом. Привод вращения рычагов механизма шагания выполнен виде двух гидроцилиндров, связывающих первый рычаг с корпусом и со вторым рычагом. Блокирующие механизмы приводов вращения колеса и рычагов размещены в соответствующих приводных компонентах. Такой движитель способен исключить излишние вертикальные перемещения центра масс в режиме колесного шагания. В тоже время он позволяет регулировать относительное положение колес и корпуса по вертикали. Все три независимые приводы каждого движителя управляются водителем с помощью трех рычагов, размещенных в кабине водителя, таким образом общее количество рычагов равно 12, что существенно затрудняет управление транспортным средством и снижает подвижность, ведь водитель должен был следить еще и за направлением движения. Вращение рычагов механизма шагания с помощью гидроцилиндров приводит к громоздкой конструкции, с неприемлемыми габаритно - массовыми характеристиками.
Испытания макета экспериментально подтвердили существенное повышение проходимости транспортного средства на грунтах с низкой несущей способностью [6]. Однако применение транспортного средства с таким колесно-шагающим движителем ограничивается сложностью и громоздкостью конструкции, усугубляемой гидроприводом и сетью его трубопроводов, а также трудностями управления. Наличие гидропривода исключает возможность доставки транспортного средства на Луну и на Марс, связанную с пребыванием в невесомости, где жидкости изменяют свойства, а также эксплуатацию этого транспортного средства на поверхности Луны, где температура среды лунной ночью опускается ниже 150°С.
Именно патент [5] был использован советскими разработчиками самоходного автоматического шасси Лунохода-1 в качестве прототипа целого семейства колесно-шагающих движителей, разработанных на основе электромеханических и электромагнитных приводов применительно к задачам движения, дистанционного и автоматического управления планетоходами в лунных и марсианских условиях.
Широкий комплекс исследований был проведен, в частности, в процессе ходовых испытаний колесно-шагающего макета КШМ с групповым (интегральным) приводом механизмов шагания мотор-колес в режимах непрерывных и прерывных походок [7, 8, 9]. Испытания на слабо связных грунтах типа кварцевого и вулканического песка, на стенде «Переменный уклон» и естественных полигонах позволили экспериментально определить предельные углы подъема макета КШМ. В режиме непрерывных походок они оказались равными 25°, а в режиме прерывных походок 28°, что недостижимо в колесном режиме движения на слабо связных грунтах. [10]. Однако групповой привод шагания не позволяет реализовать некоторые алгоритмы автоматического управления механизмами шагания, например, регулирование относительного положения колес и корпуса по вертикали. Все возможные алгоритмы доступны только при индивидуальных приводах вращения колес и рычагов механизмов шагания.
В процессе конструкторского поиска был разработан колесно-шагающий движитель [11], содержащий два шарнирно сочлененных рычага, первый из которых своим свободным концом поворотно связан с корпусом транспортного средства, а второй - со ступицей ходового колеса, зубчатые передачи вращения колеса и рычагов, а также блокирующие механизмы этих передач, отличающийся тем, что, с целью упрощения управления, зубчатая передача вращения двух рычажного механизма шагания включает солнечную шестерню, размещенную соосно оси вращения первого рычага и жестко связанную с корпусом транспортного средства, сателлит, находящийся в зацеплении с солнечной шестерней через паразитную шестерню, установленный на валу, проходящем через сочленяющий шарнир рычагов и жестко соединенный со вторым рычагом, при этом зубчатая передача вращения колеса, связанная с тяговым двигателем, состоит по крайней мере из двух ступенчатого редуктора, входной вал которого расположен соосно ступице первого рычага, промежуточный - оси сочленения рычагов, выходной - свободной оси второго рычага и ступице ходового колеса. Блокирующий механизм зубчатой передачи вращения рычагов выполнен в виде червячного редуктора, червяк которого установлен в корпусе транспортного средства и связан с командным электродвигателем, а червячное колесо связано с первым рычагом.
Главным достижением этой схемы явилась разработка чрезвычайно эффективного механизма шагания, выполненного в виде планетарной передачи наружного зацепления с неподвижной солнечной шестерней, в которой роль водила выполняет первый рычаг, в котором организованы опоры паразитной шестерни, зацепляющейся с солнечной шестерней, и опоры сателлита, установленного на валу шарнирного сочленения рычагов, который жестко связан со вторым рычагом, причем передаточное отношение от солнечной шестерни к сателлиту относительно водила равно +0,5. Эта планетарная передача, которую называют также суммирующей передачей, позволяет наиболее простым способом, с помощью одного двигателя, реализовать функции колесного шагания, то есть возвратно-поступательного перемещения оси колеса под действием толкающей силы, по оптимальной траектории, эквидистантной траектории полюса идеального контакта обода ведущего колеса с опорной поверхностью. Так, например, на горизонтальной опорной поверхности траектория оси колеса, под действием толкающей силы механизма шагания, представляет собой также горизонтальную линию.
Такой механизм сокращает количество управляемых двигателей, например, для четырехколесного транспортного средства требуется восемь двигателей, вместо 12 двигателей у прототипа. При этом характер траектории позволяет осуществлять переход из колесно-шагающего в колесный режим движения в любой момент времени простым выключением командных электродвигателей всех колес. Это обстоятельство, в свою очередь, позволяет осуществлять движение в колесном режиме с различной колесной базой.
Поэтому описанный механизм шагания с двумя равноплечими рычагами и связывающей их суммирующей передачей, который преобразует вращательное движение вала привода шагания в поступательное движение оси колеса, остается актуальным до настоящего времени. Актуальной остается и реализуемая с его помощью равномерная прерывная походка, при которой первоначально осуществляется поочередный вынос колес по одному путем разблокировки и включения привода выносимого колеса при заблокированных приводах вращения остальных колес, а, по завершению этого процесса, осуществляется перенос корпуса. Благодаря дифференциальной связи выносимого колеса и рычагов механизма шагания, вынос колеса осуществлялся под действием приложенного к колесу активного крутящего момента и толкающей силы, приложенной к оси колеса, и пропорциональной действующему на рычаги реактивному крутящему моменту. Толкающая сила может достигать большой величины, так, как ее максимальное значение определяется взаимодействием с грунтом всех заблокированных колес. Перенос корпуса осуществляется путем одновременного разблокирования и включения приводов всех колес. Однако дифференциальная связь колес и рычагов на этом этапе не гарантирует обязательного переноса корпуса, что является главным недостатком этой схемы движителя. Кроме того, блокирующий механизм, выполненный в виде червячного редуктора, существенно ухудшает габаритно-массовые характеристики движителя, усложняет смену алгоритмов управления и требует высокой точности регулирования скорости вращения вала командного электродвигателя. В совокупности эти обстоятельства снижают подвижность транспортного средства.
Перечисленные недостатки были устранены в колесно-шагающем движителе, который содержит два шарнирно-сочлененных и связанных друг с другом, с помощью суммирующей передачи, рычага, первый из которых своим свободным концом поворотно соединен с корпусом транспортного средства, а второй - со ступицей колеса, тяговый двигатель, размещенный в первом рычаге, тяговый редуктор, размещенный в обоих рычагах, блокирующий механизм, расположенный в первом рычаге между двигателем и тяговым редуктором. В отличие от предыдущего прототипа, этот движитель снабжен планетарным редуктором шагания, расположенным между блокирующим механизмом и тяговым редуктором, а сам блокирующий механизм выполнен в виде трехзвенного планетарного механизма, солнечная шестерня которого соединена с валом тягового двигателя, водило - с входным валом тягового редуктора, эпицикл - с входным валом планетарного редуктора шагания, выходное звено которого связано с первым рычагом, при этом водило и эпицикл блокирующего механизма снабжены управляемыми тормозами не поворотно связанными с корпусом транспортного средства [12]. Этот движитель исключает дифференциальную связь между рычагами и колесом на этапе переноса корпуса, что позволяет повысить проходимость транспортного средства при реализации колесного шагания на основе автоматических алгоритмов управления включением - выключением тягового двигателя и управляемых, например, с помощью электромагнитов, тормозов. Однако дифференциальная связь может исключить движение и при выносе колеса, например, в случае отсутствия контакта колеса с грунтом.
Недостатком движителя является невозможность использования механизма шагания для адаптации ходовых колес к сложному рельефу, например, путем управляемого регулирования относительного положения колес и корпуса по вертикали.
Этот недостаток частично устранен в колесно-шагающем движителе, отличающемся от движителя [12] тем, что корпус тягового двигателя установлен в корпусе транспортного средства с возможностью поворота и связан с ним посредством управляемой сцепной муфты [13]. Движение в колесном и колесно-шагающем режимах осуществляется при замкнутой сцепной муфте. Для перевода механизма шагания в режим регулирования относительного положения колес и корпуса, механизм шагания приводится с помощью тягового привода и блокирующего механизма в положение, при котором оси вращения свободных концов сочлененных рычагов совпадают с осью вращения колеса. При этом все оси вращения двух свободных и двух сочлененных концов рычагов механизма шагания, а также ось вращения колеса оказываются в плоскости, перпендикулярной опорной поверхности. Это положение соответствует конфигурации самоходного шасси в среднем положении механизма шагания колес, которое также называют номинальной колесной базой. Длинная колесная база достигается путем выноса колес передней и задней колесных осей в противоположных относительно поперечной оси симметрии шасси направлениях, а короткая база - во встречных, к указанной оси, направлениях.
После этого управляемая сцепная муфта размыкается, а на тяговый двигатель подается команда на вращение по или против часовой стрелки на угол 90°. Поскольку момент сопротивления вращению корпуса тягового двигателя значительно меньше момента сопротивления вращению тягового редуктора и редуктора шагания, то при этом корпус тягового двигателя вместе с первым и вторым рычагами поворачиваются на указанный угол таким образом, что все оси вращения рычагов и колеса оказываются в плоскости, параллельной опорной поверхности. В этом положении подается команда на замыкание сцепной муфты и механизм шагания обеспечивает возможность относительного перемещения колес и корпуса по вертикали с помощью тягового двигателя и управляемых тормозов блокирующего механизма. При этом самоходное шасси сохраняет номинальную колесную базу, однако реализовать длинную и короткую базы уже не представляется возможным. Взамен относительного движения колес и корпуса параллельно опорной поверхности, механизмы шагания способны реализовать относительное движение только в плоскости, перпендикулярной опорной поверхности. В отличие от режима колесного шагания эта ситуация ниже называется работой механизма шагания в режиме активной подвески.
Колесно-шагающий движитель такого типа был использован в конструкции макета экспериментального образца самоходного автоматического шасси (ЭО САШ) марсохода. Ходовые испытания этого макета на стенде «Переменный уклон», кварцевых и вулканических песках на естественных полигонах показали, что, в режиме равномерной прерывной походки, он способен преодолевать подъемы с углом естественного откоса песка равном 32-34°. Одновременно испытания подтвердили возможность автоматической смены режимов работы механизма шагания из колесно-шагающего режима в режим работы в качестве активной подвески и обратно. Подтвердилась и эффективность такого регулирования в некоторых сложных ситуациях на трассах, даже с учетом необходимости остановок для изменения конфигурации ходовой части [10].
Недостатком движителя является то, что такое регулирование, т.е. работа механизма шагания в режиме активной подвески возможна только при стоянке транспортного средства. Это ограничение существенно снижает среднюю скорость движения по сложному рельефу, характеризующую подвижность транспортного средства. При волнообразном профиле местности, синусоидального типа, например, при преодолении песчаных барханов, движение в колесном режиме с активной подвеской практически невозможно.
Еще одним недостатком прототипа [13] и аналогов [4, 7, 11, 12] является то, что они не имеют рулевых механизмов и, следовательно, предусматривают либо секционирование несущей конструкции, что не всегда приемлемо, либо бортовой поворот транспортного средства путем реверса или различной скорости вращения колес противоположных бортов, что может оказаться проблематичным в сложных условиях движения особенно для четырех колесных транспортных средств. Это обстоятельство существенно снижает маневренность транспортного средства. Сохраняется и проблема надежного выноса колеса при потере контакта с грунтом.
Цель изобретения - повышение надежности и подвижности транспортного средства и его функциональных возможностей путем обеспечения возможности регулирования относительного положения колес и корпуса по вертикали, включая изменение дорожного просвета, непосредственно при движении в колесном режиме по любому профилю. Это позволяет реализовать различные автоматические алгоритмы адаптации полно приводного транспортного средства к сложному рельефу.
Дополнительная цель изобретения - повышение маневренности транспортного средства с колесно-шагающим движителем благодаря обеспечению возможности поворачивать плоскость вращения колес относительно вертикальной оси с минимальным сопротивлением при любой конфигурации механизма шагания.
Прототипом предполагаемого изобретения по составу своих элементов, характеру связей между ними, близости к решению поставленной задачи является колесно-шагающий движитель [13].
Поставленная цель повышения надежности реализации колесного шагания и подвижности транспортного средства достигается тем, что, в дополнение к компонентам прототипа, в состав движителя включены следующие компоненты: поворотный корпус, двигатель и редуктор поворотного корпуса, при этом тяговый привод размещен в ступице колеса, а его корпус соединен с неповоротным корпусом транспортного средства с помощью двух реактивных цепных передач, встроенных в первом и втором рычагах. Замена недостаточно надежных дифференциальных связей колеса и механизма шагания на раздельные приводы вращения этих звеньев движителя, повышают надежность исполнения колесно-шагающего режима и обеспечивают возможность движения в колесном режиме с функцией активной подвески.
Дополнительная цель изобретения - повышение маневренности транспортного средства с колесно-шагающим движителем благодаря возможности выполнять поворот плоскости вращения ходовых колес при любой конфигурации механизма шагания, достигается тем, что между реактивной передачей и корпусом тягового привода установлен приводной рулевой механизм, корпус которого поворотно связан со свободным концом второго рычага и жестко связан со звездочкой реактивной цепной передачи второго рычага. Рулевой механизм, выполняющий функции шкворня, поворотно установлен на кронштейне, связанным с корпусом тягового привода таким образом, что ось шкворня, совпадающая с осью выходного вала рулевого механизма, проходит через центр пятна контакта колеса с опорной поверхностью, а передаточное отношение реактивной передачи, связывающей корпус рулевого механизма с корпусом транспортного средства, выбрано равными +1.
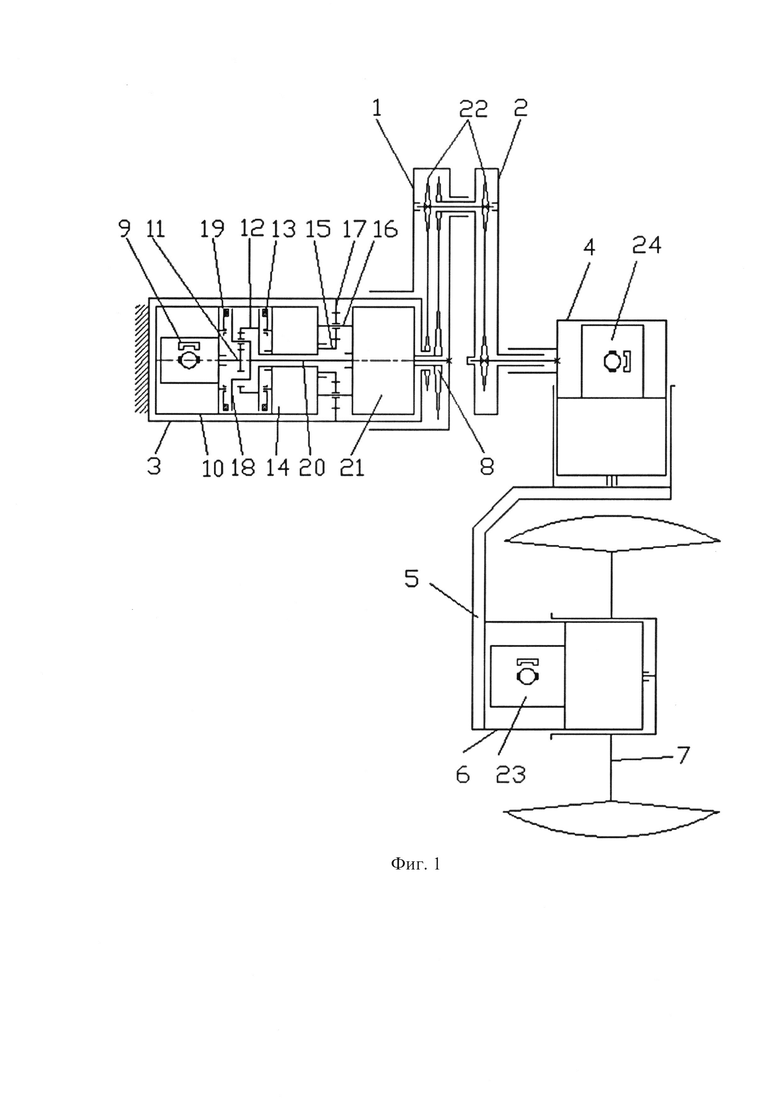
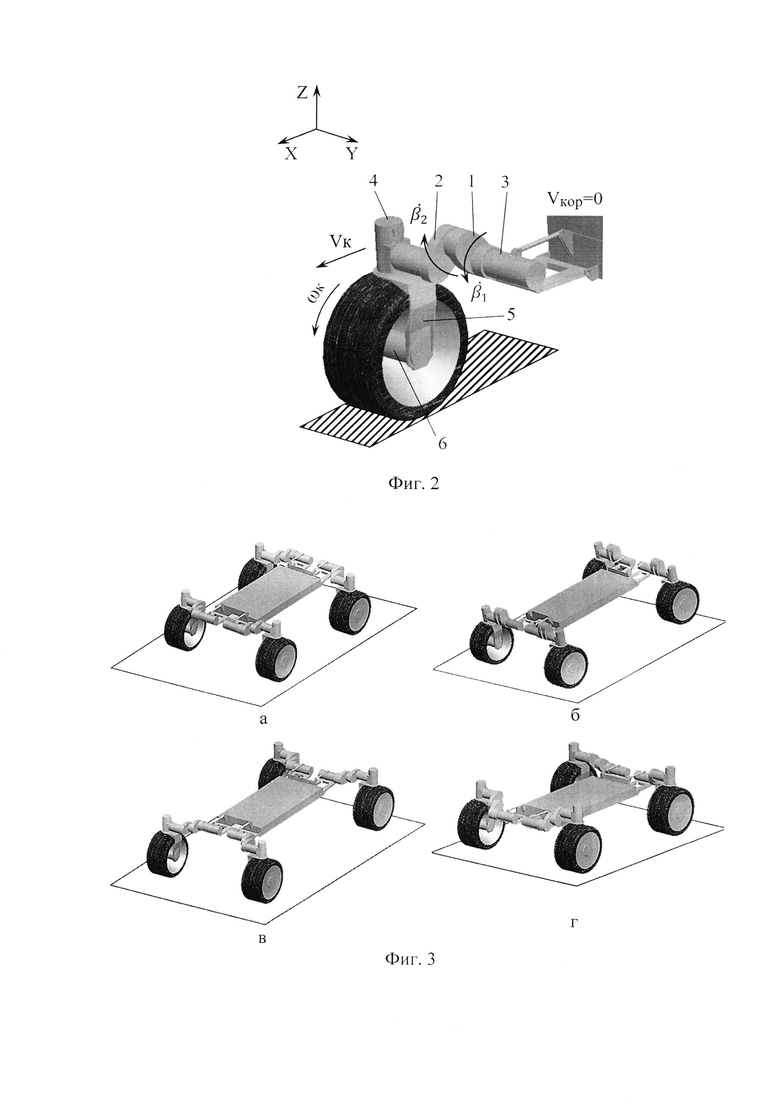
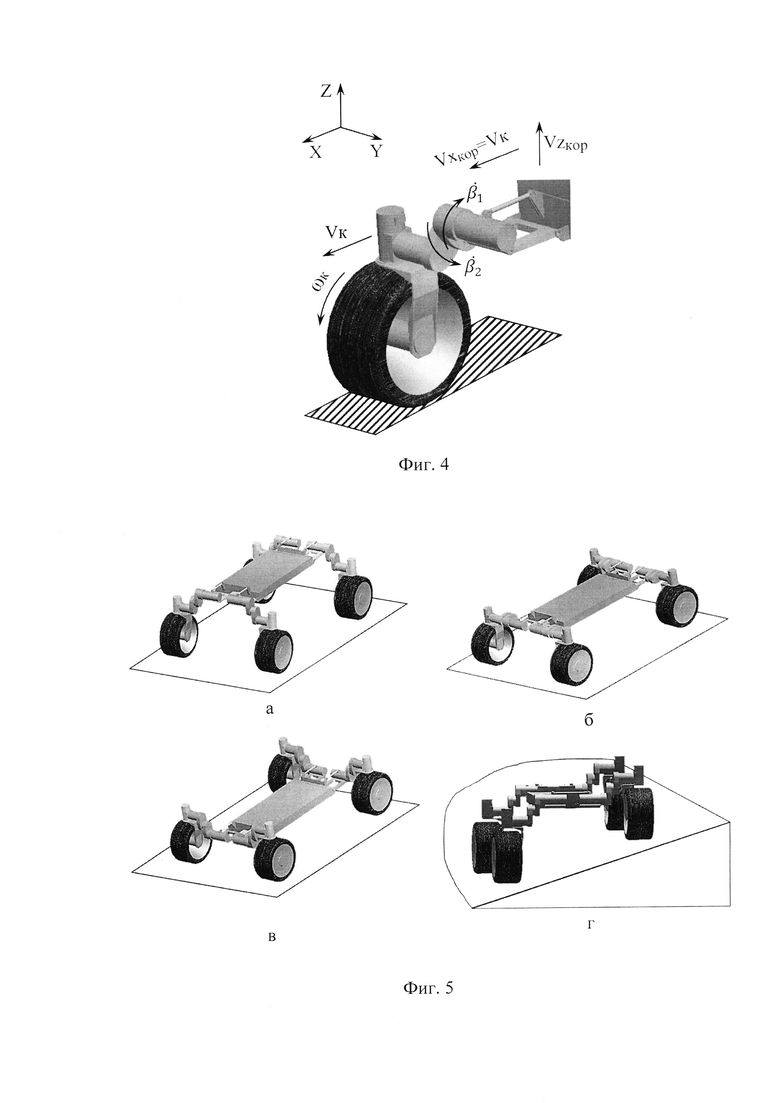
На фиг.1 приведена структурно-кинематическая схема колесно-шагающего движителя, в конфигурации, обеспечивающей движение в колесном и колесно-шагающем режимах; на фиг. 2 - компоновочная схема движителя в конфигурации для движения в колесно-шагающем режиме; на фиг. 3 - компоновочные схемы самоходного шасси транспортного средства в конфигурациях «короткая база» (а), «номинальная база» (б), «длинная база» (в) и «транспортировочное положение» (г); на фиг. 4 - компоновочная схема движителя в конфигурации для движения в колесном режиме с функцией активной подвески, на фиг. 5 - компоновочные схемы самоходного шасси транспортного средства в конфигурациях колесно-шагающего движителя с функцией активной подвески при движении в колесном режиме с максимальным (а), номинальным (б) и минимальным (в) клиренсом, а также при движении по косогору с сохранением горизонтального положения корпуса (г).
Движитель (фиг. 1) состоит из двух пустотелых, шарнирно сочлененных рычагов 1 и 2 механизма шагания. Рычаг 1 поворотно установлен на стакане 3, конструктивно объединенном с корпусом (рамой) транспортного средства. Рычаг 2 связан поворотно с корпусом рулевого механизма 4, выходной вал которого лежит в одной плоскости со свободной осью рычага 2 перпендикулярно ей и соединен с кронштейном 5, конструктивно объединенном с фланцем тягового привода 6 колеса 7 таким образом, что ось шкворня, которая совпадает с осью выходного вала рулевого механизма, проходит через центр пятна контакта колеса с опорной поверхностью.
Рычаги механизма шагания движителя связаны друг с другом с помощью суммирующей передачи 8, выполненной в виде цепной передачи, передаточное отношение которой от первого ко второму рычагу равно +0,5, поэтому свободная ось второго рычага 2 при вращении первого рычага 1 совершает строго линейные перемещения.
Электродвигатель 9 механизма шагания конструктивно объединен с поворотным корпусом 10, установленным поворотно внутри стакана 3, а вал этого электродвигателя соединен с солнечной шестерней 11 блокирующего механизма. Эпицикл 12 блокирующего механизма снабжен электромагнитным тормозом 13, установленным в поворотном корпусе 10, и соединен через редуктор 14 и планетарную передачу, состоящую из установленной на выходном валу редуктора 14 солнечной шестерни 15, закрепленного в поворотном корпусе 10 водила 16 и установленного внутри стакана 3 эпицикла 17, с корпусом транспортного средства, а водило 18 снабжено электромагнитным тормозом 19, также установленным в поворотном корпусе 10, и соединено валом 20, проходящим через центральное отверстие редуктора 14, с редуктором 21 механизма шагания, выходной вал которого, в свою очередь, жестко связан с первым рычагом 1.
Электромагнитный тормоз 13 обеспечивает торможение поворотного корпуса 10. Вращением поворотного корпуса 10 на угол 90° происходит перевод движителя либо в режим колесного шагания, либо в режим регулирования относительного положения колес и корпуса транспортного средства по вертикали, т.е. в режим работы активной подвески.
Электромагнитный тормоз 19 обеспечивает торможение рычагов 1 и 2 механизма шагания.
Внутри рычагов 1 и 2 размещена реактивная цепная передача 22, связывающая корпус рулевого механизма 4 с корпусом транспортного средства. Передаточное отношение цепной передачи 22 равно +1, поэтому, при повороте рычагов 1 и 2 механизма шагания рулевой механизм 4 вместе с колесом 7 совершает плоско-параллельные перемещения, сохраняя ориентацию оси шкворня таким образом, что она проходит через центр пятна контакта колеса с опорной поверхностью. Ориентация оси шкворня сохраняется и при вращении поворотного корпуса 10.
Тяговый привод 6 снабжен электродвигателем 23, а рулевой механизм 4 снабжен электродвигателем 24. Торможение электродвигателей 23 и 24 может производиться механически, с помощью встроенных электромагнитных тормозов (условно не показаны), либо электрически, тормозным режимом управления.
Как видно из фиг. 1, на горизонтальной площадке, в положении «номинальная колесная база», так же, как у прототипа, все горизонтальные оси поворота двух свободных и двух сочлененных концов рычагов механизма шагания, а также горизонтальная ось вращения колеса оказываются в одной плоскости, перпендикулярной опорной поверхности. В этой же плоскости находятся оси вращения новых компонентов - горизонтальные оси вращения вала двигателя 9, и поворотного корпуса 10, а также вертикальная ось поворота кронштейна 5 (ось шкворня).
Движитель (фиг. 1) работает следующим образом. При включенных (механически замкнутых) тормозах 13 и 19, рычаги 1 и 2, и поворотный корпус 10 сблокированы с корпусом транспортного средства как одно целое. Поэтому, при одновременном включении электродвигателей 23 тяговых приводов 6 транспортного средства выполняется колесный режим движения, а при торможении этих электродвигателей обеспечивается тормозной режим. С помощью электродвигателей 24 рулевых механизмов 4 осуществляется поворот колес 7 для задания необходимой траектории движения транспортного средства.
Перед переходом движителя в режим колесного шагания колеса 7 должны быть установлены с помощью рулевых механизмов 4 таким образом, чтобы плоскости их вращения были параллельны продольной оси транспортного средства.
Режим колесного шагания состоит из этапа выноса колеса и этапа отталкивания (переноса корпуса транспортного средства).
При включении тормоза 13 и выключении тормоза 19 осуществляется этап выноса колеса. Для этого включается электродвигатель 9 и крутящий момент с его вала через водило 18, вал 20, редуктор механизма шагания 21 передается на рычаг 1 механизма шагания и через суммирующую передачу на рычаг 2 этого механизма, а от электродвигателя 23 тягового привода 6 одновременно приводится во вращение колесо 7. Вынос каждого колеса (фиг. 2) транспортного средства производится поочередно, остальные колеса при этом заторможены. Перемещение оси вращения колеса, даже при отсутствии его контакта с опорной поверхностью, происходит в плоскости, параллельной опорной поверхности со скоростью Vк, величина которой определяется алгоритмами управления электродвигателя 9 и, соответственно, угловой скоростью вращения первого рычага  , а также электродвигателя 23 и, соответственно, угловой скоростью колеса ωк. При этом поступательная скорость корпуса транспортного средства VХкор и его вертикальная скорость VZкор равны нолю.
, а также электродвигателя 23 и, соответственно, угловой скоростью колеса ωк. При этом поступательная скорость корпуса транспортного средства VХкор и его вертикальная скорость VZкор равны нолю.
Режим выноса колес используется, кроме колесного шагания, также для установки короткой (фиг. 3.а) и длинной (фиг. 3.в) колесной базы, что достигается путем выноса колес передней и задней колесных осей либо в противоположных, либо во встречных направлениях относительно номинального положения (фиг. 3.б).
Колесный режим движения и поворот плоскости вращения колес возможны в любом положении рычагов 1 и 2 механизма шагания, в том числе при номинальной, длинной и короткой колесных базах транспортного средства.
При включении тормоза 13 и выключении тормоза 19 осуществляется также и этап переноса корпуса. При этом от электродвигателя 9 вращаются рычаги 1 и 2 механизмов шагания всех движителей соответственно со скоростями и  , а тяговый привод 6 всех мотор-колес транспортного средства затормаживается, ωк=0.
, а тяговый привод 6 всех мотор-колес транспортного средства затормаживается, ωк=0.
Подготовку к работе движителя в колесном режиме с возможностью регулирования относительного положения колес и корпуса транспортного средства по вертикали, например, для изменения клиренса (дорожного просвета), производят при следующей последовательности операций для каждого колеса движителя.
Включением этапа переноса колеса (тормоз 13 включен, тормоз 19 выключен) и одновременным включением двигателя 9 механизма шагания и двигателя 23 тягового привода 6 осуществляется перемещение колеса до момента, когда свободные оси рычагов 1 и 2 совпадают, т.е. рычаги занимают описанное выше и приведенное на фиг. 1 и фиг. 3.б «номинальное положение». По достижении этого положения тормоз 13 выключается, тормоз 19 включается, тяговый привод 6 колеса 7 затормаживается. При включении электродвигателя 9 осуществляется вращение поворотного корпуса 10 в стакане 3 вместе с электродвигателем 9 и рычагами 1 и 2 как единое целое, так как они сблокированы тормозом 13.
Поворот корпуса 10, независимо от направления вращения, производится на 90°, когда общая ось рычагов механизма шагания в сочленении, окажется в одной горизонтальной плоскости со свободными осями поворота рычагов. После этого электродвигатель 9 выключается и включается тормоз 19. Эти операции выполняются для всех колес транспортного средства по одному или для всех одновременно и подготовка к работе колесно-шагающего движителя с функцией активной подвески завершается, так как механизмы шагания изменили горизонтальную траекторию движения своих свободных осей на вертикальную.
Работа движителя в режиме активной подвески производится при включенном тормозе 13 и выключенном тормозе 19 вращением рычагов 1 и 2 в каждом приводе механизма шагания движителя с помощью электродвигателя 9. В зависимости от направления вращения выходного вала двигателя 9 производится соответствующее перемещение корпуса, либо для увеличения дорожного просвета, либо для уменьшения, причем клиренс может изменяться в диапазоне двойной суммы длин обоих рычагов. После выставки соответствующего дорожного просвета производится отключение двигателя 9 и включение тормоза 19.
Регулирование относительного положения колес и корпуса по вертикали может осуществляться не только на стоянке, но и в движении (фиг. 4), при этом во всем диапазоне работы механизмов шагания возможно изменение плоскости вращения колес с помощью рулевых механизмов. Скорость поступательного движения колеса и корпуса при этом совпадают VК=VХкор и определяется алгоритмами управления электродвигателя 23 тягового привода 6, а вертикальная скорость корпуса транспортного средства VZкор определяется алгоритмами управления электродвигателя 9.
Необходимо отметить, что рычаги 1 и 2 могут устанавливаться не только в необходимое, для оптимального режима работы механизма шагания, исходное положение с горизонтальной (колесно-шагающий режим) или вертикальной (режим работы активной подвески) траекторией движения свободных осей рычагов механизма шагания, но и в любое промежуточное положение между этими положениями. Это дает возможность, например, уменьшить габаритные размеры самоходного шасси планетохода в транспортировочном положении (фиг. 3.г), для его размещения в ограниченных габаритах космического аппарата. После доставки планетохода к месту эксплуатации, трансформация самоходного шасси из транспортировочного в рабочее положение производится собственными приводами ходовой части, без применения специальных домкратов.
Таким образом, применение изобретения позволяет расширить функцию механизма шагания для режима адаптации к рельефу местности путем его использования в качестве активной подвески (фиг. 5). Кроме того, во всех положениях рычагов механизма шагания, как при движении с изменяемой колесной базой, так и при работе механизма шагания в режиме активной подвески обеспечивается работа рулевых механизмов. Все это позволит повысить проходимость, маневренность и в целом подвижность транспортного средства, что, применительно к планетоходам исследовательского и технологического назначения, означает увеличение времени на проведение научных исследований и выполнение строительных, монтажных и иных работ, за счет существенного сокращения времени выполнения чисто транспортных операций в различных районах неподготовленной местности.
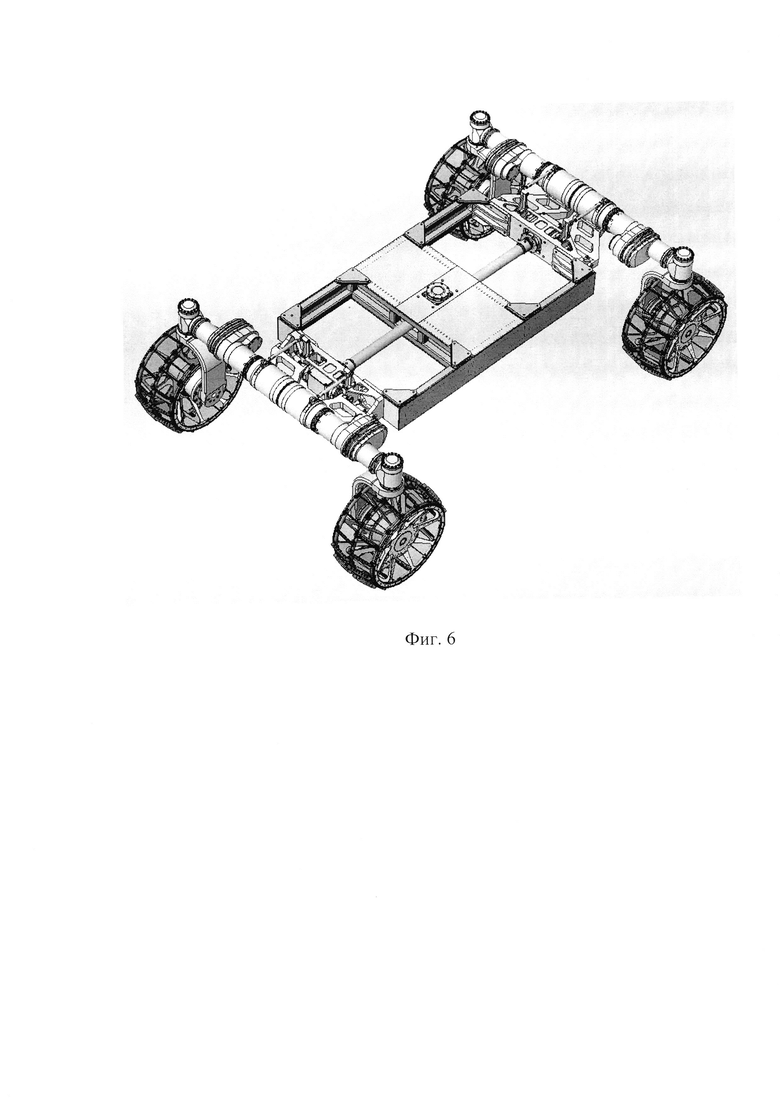
Для того, чтобы подтвердить возможность решения конструкторских проблем при создании сложного мехатронного агрегата, оценить его габаритно - массовые характеристики и уточнить проектные тактико-технические характеристики транспортного средства была разработана 3D модель самоходного шасси с входящими моделями его основных компонентов.
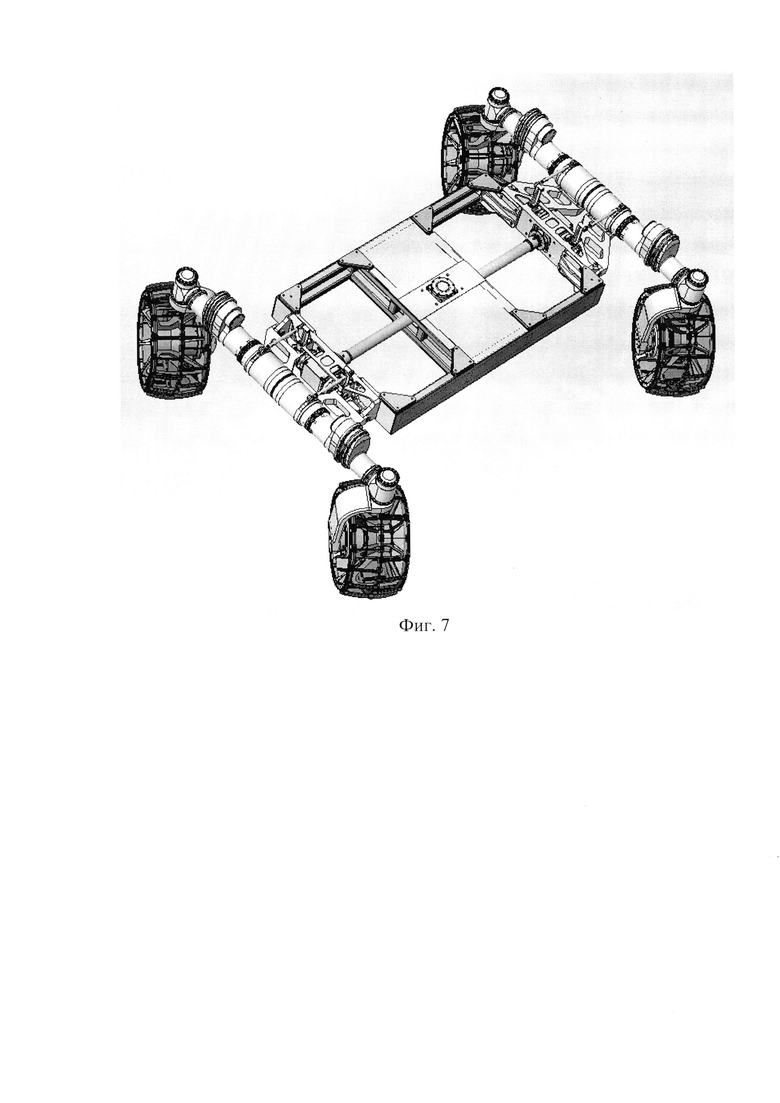
На фиг. 6 приведен проектный вариант четырех колесного самоходного шасси массой примерно 100 кг с колесно-шагающим движителем, разработанным на основе структурно - кинематической схемы (фиг. 1), способным реализовать функции активной подвески при движении в колесном режиме по произвольному профилю. На фиг. 7 приведена конфигурация самоходного шасси для маневрирования без изменения ориентации продольной оси транспортного средства.
Применительно к условиям на поверхности Луны разработанное самоходное шасси способно обеспечить движение лунохода с полной массой 750-800 кг:
- в колесном режиме движения с пассивной балансирной подвеской по спокойному рельефу, по связному грунту и деформируемым грунтам с несущей способностью более 30 кПа, на подъемы не более 7°-10°, со скоростью до 1,4 км/час;
- в колесном режиме движения с совместной работой пассивной и активной подвесок по сложному рельефу, включая камни высотой до 0,5 м (на сравнительно ровной поверхности), на подъемы не более 20°-25°, по связному грунту и деформируемому грунту с несущей способностью (20 - 30) кПа со скоростью до 0,4 км/час;
- в колесно-шагающем режиме с равномерной прерывной походкой на подъемы до 32°-34° по связному грунту и деформируемому грунту с несущей способностью не менее (5-10) кПа со скоростью до 0,025 км/час.
Выбор параметров тягового привода, приводов шагания и рулевого механизма выполнен на основе тягово-динамических расчетов по методикам, приведенным в [14, 15, 16, 17], с учетом результатов исследований физико-механических свойств лунного грунта и его земных аналогов [18]. Синтез схемы колесно-шагающего движителя с функцией активной подвески, выбор параметров редуктора поворотного корпуса, разработка методики и расчет режимов нагружения привода шагания при реализации функции активной подвески, а также разработка моделей нового колесно-шагающего движителя и самоходного шасси на его основе выполнены в рамках проекта Министерства образования и науки №14.576.21.0050, идентификационный номер RFMEFI57614X0050 [19].
Дополнительные механизмы, обеспечивающие повышение надежности, проходимости, маневренности и, в целом, подвижности транспортных средств, предназначенных для движения по неподготовленной местности, неминуемо увеличивают массу самоходного шасси. Поэтому такое повышение энерговооруженности транспортных средств высокой проходимости, например, планетоходов, целесообразно совмещать с одновременным уменьшением количества опор, переходом от восьми и шести колесных автоматических планетоходов к четырех колесным. В этом случае количество приводов, наиболее существенно влияющее на массу шасси, изменяется незначительно и полностью перекрывается повышением ходовых качеств, определяющих эффективность транспортных операций.
Так, например, самоходное шасси шести колесных марсоходов миссии MER (Opportunity и Spirit) с поворотными крайними колесами имеют по 10 приводов: 6 тяговых и 4 - рулевых. Для того, чтобы сравнять качества этих марсоходов с проектными показателями четырех колесной машины только по маневрированию, необходимы еще 2 рулевых привода средних колес.
Четырех колесный планетоход на основе настоящего изобретения имеет 12 приводов: по четыре тяговых, шагания и рулевых. При этом, несмотря на некоторое увеличение нагрузки на деформируемый грунт, его проектные параметры проходимости и возможности адаптации к рельефу существенно выше по сравнению с современными шести колесными марсоходами.
Список использованных источников
1. Беккер М.Г. Введение в теорию систем «Местность-машина», М.: Машиностроение. 1973. - С. 304-306. (Перевод с англ. «Introduction to terrain-Vehicle Systems», 1969).
2. Селиванов И.И. Автомобили и транспортные гусеничные машины высокой проходимости. М.: Наука. - 1967.
3. Агейкин Я.С. Вездеходные колесные и комбинированные движители. М.: Машиностроение. 1972. - С. 159-162.
4. Патент США №3842926, кл. 184-8R, опубл. 1974.
5. Планетоходы. Кемурджиан А.Л., Громов В.В., Кажукало И.Ф., и др. Под ред. А.Л. Кемурджиана. М.: Машиностроение, 1982. - С. 85-87.
6. Miatech K., Tacom Tests concept to improve vehicle Mobility. Army Research and Development Newsmagazine. Vol. 11, #5. 1970. - P. 9.
7. A.C. №596496 (СССР). Колесно-шагающий движитель. М.Кл. В62D 57/02. Кажукало И.Ф., Сологуб П.С., Комиссаров В.И. и др. Опубл. 1978.
8. А.С. №640897 (СССР). Способ непрерывного передвижения транспортного средства с колесно-шагающим движителем в колесно-шагающем режиме. М.Кл. В62D 57/02. Кемурджиан А.Л., Громов В.В., Кажукало И.Ф. и др. Опубл. 1979.
9. А.С. №698830 (СССР). Способ передвижения колесно-шагающего движителя в колесно-шагающем режиме. М.Кл. В62D 57/02. Кемурджиан А.Л., Громов В.В., Кажукало И.Ф. Опубл. 1979.
10. Математическое моделирование и ходовые испытания планетоходов. Кажукало И.Ф., Маленков М.И., Кемурджиан А.Л. и др. В книге «Передвижение по грунтам Луны и планет». Громов В.В., Забавников Н.А., Наумов В.Н. и др. Под ред. А.Л. Кемурджиана. М.: Машиностроение. 1986. - С. 235-248.
11. А.С. №552232 (СССР). Колесно-шагающий движитель. М.Кл. В62D 57/02. Кажукало И.Ф., Корепанов Г.Н., Маленков М.И. и др. Опубл. 1977.
12. А.С. №650877 (СССР). Колесно-шагающий движитель. М.Кл. В62D 57/02. Кажукало И.Ф., Корепанов Г.Н., Маленков М.И. и др. Опубл. 1979.
13. А.С. №921936 (СССР). Колесно-шагающий движитель. М.Кл. В 62D 57/02. Кажукало И.Ф., Кузьмин М.М., Маленков М.И. и др. Опубл. 1982.
14. Кажукало И.Ф. Колесно-шагающий движитель как средство повышения проходимости. В книге «Передвижение по грунтам Луны и планет». Громов В.В., Забавников Н.А., Наумов В.Н. и др. Под ред. А.Л. Кемурджиана. М.: Машиностроение. 1986. - С. 141-185.
15. Маленков М.И., Кемурджиан А.Л., Тяговая динамика планетохода. В книге «Динамика планетохода». Авотин Е.В., Болховитинов И.С., Шпак Ф.П. и др. Под ред. А.Л. Кемурджиана и Б.Н. Петрова. М.: Наука, 1979. - С. 56-195.
16. Кемурджиан А.Л., Громов В.В., Черкасов И.И., Шварев В.В. Автоматические станции для изучения поверхностного покрова Луны. М.: Машиностроение. 1976. - 198 с.
17. Маленков М.И., Волов В.А. Лазарев Е.А. Методы и результаты анализа качества ходовой части планетоходов. Вестник Машиностроения. №7, 2016. - С. 6-13.
18. Исследование механических свойств лунного грунта на самоходном аппарате «Луноход-1». Леонович А.К., Громов В.В., Рыбаков А.В. и др. В книге «Передвижная лаборатория на Луне Луноход-1. М.: Наука. 1971. - С. 78-88.
19. Отчет о прикладных научных исследованиях «Создание научно-технических решений в области разработки робототехнических средств космического назначения для обеспечения напланетных миссий» по теме «Обобщение и оценка результатов исследований», этап 5, АО НТЦ «РОКАД». Санкт-Петербург. № госрегистрации 114120870012. - 2016. - 357 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Колесно-шагающий движитель | 1979 |
|
SU880852A1 |
| Колесно-шагающий движитель транспортного средства | 1975 |
|
SU596496A1 |
| Высокоподвижный исследовательский планетоход | 2022 |
|
RU2780069C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ПРЕОБРАЗУЕМАЯ ТРАНСПОРТНАЯ МАШИНА ДЛЯ ОБРАБОТКИ ПОЧВЫ | 1999 |
|
RU2218684C2 |
| Колесно-шагающий движитель | 1980 |
|
SU908646A1 |
| Колесно-шагающий движитель | 1975 |
|
SU541718A1 |
| Колесно-шагающий движитель | 1980 |
|
SU874445A1 |
| Трансформируемое ведущее колесо безэкипажного транспортного средства | 2015 |
|
RU2609851C1 |
| Колесно-шагающий движитель | 1976 |
|
SU650877A1 |
| Колесно-шагающий движитель | 1980 |
|
SU921936A1 |
Изобретение относится к колесно-шагающим движителям транспортных средств высокой проходимости. Колесно-шагающий движитель содержит два равноплечих шарнирно-сочлененных рычага, тяговый привод, включающий двигатель и редуктор, размещенные в ступице колеса, размещенные в первом рычаге редуктор шагания и блокирующий механизм. Первый рычаг свободным концом поворотно соединен с корпусом транспортного средства, а второй поворотно соединен со ступицей колеса. Корпус жестко связан со стаканом, в котором размещен поворотный корпус со встроенными в него двигателем и редуктором поворотного корпуса, выходной вал которого связан зубчатой передачей с упомянутым стаканом, редуктором шагания, выходной вал которого жестко связан с первым рычагом, блокирующим механизмом, солнечная шестерня которого связана с валом двигателя. Корпус тягового привода соединен со стаканом с помощью двух реактивных цепных передач, одна из свободных звездочек которых неповоротно соединена с корпусом тягового привода, другая - со стаканом. Достигается повышение маневренности транспортного средства. 1 з.п. ф-лы, 7 ил.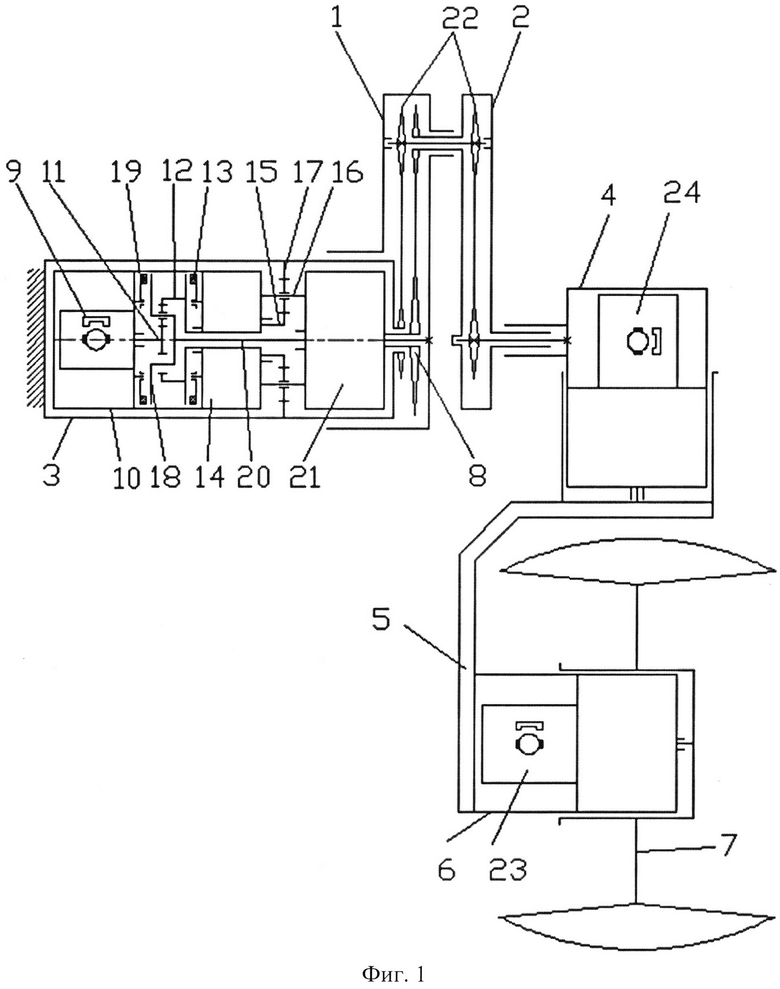
1. Колесно-шагающий движитель с функцией активной подвески, содержащий два равноплечих шарнирно-сочлененных рычага, связанных между собой суммирующей передачей с передаточным отношением, равным +0,5, первый из которых своим свободным концом поворотно соединен с корпусом транспортного средства, а второй поворотно соединен со ступицей колеса, тяговый привод, включающий двигатель и редуктор, размещенные в ступице колеса, размещенные в первом рычаге редуктор шагания и блокирующий механизм, выполненный в виде планетарной передачи, водило и эпицикл которой снабжены управляемыми тормозами, неповоротно связанными с корпусом, отличающийся тем, что с целью улучшения возможностей адаптации движителя к рельефу и повышения подвижности путем регулирования относительного положения колес и корпуса по вертикали в процессе движения в колесном режиме корпус транспортного средства жестко связан со стаканом, в котором размещен поворотный корпус со встроенными в него двигателем и редуктором поворотного корпуса, выходной вал которого связан зубчатой передачей с упомянутым стаканом, редуктором шагания, выходной вал которого жестко связан с первым рычагом, блокирующим механизмом, солнечная шестерня которого связана с валом двигателя, эпицикл - с входным валом редуктора поворотного корпуса, водило - с входным валом редуктора шагания, а корпус тягового привода соединен со стаканом с помощью двух реактивных цепных передач, одна из свободных звездочек которых неповоротно соединена с корпусом тягового привода, другая - со стаканом, а две звездочки соединены общим валом, соосным с осью сочленения рычагов, одна из опор которого установлена поворотно в первом, а вторая - во втором рычаге.
2. Колесно-шагающий движитель с функцией активной подвески по п.1, отличающийся тем, что с целью улучшения маневренности транспортного средства путем поворота плоскости вращения колес между вторым рычагом и корпусом тягового привода колеса поворотно относительно оси второго рычага установлен рулевой привод, выходной вал которого соединен с поворотным кронштейном, жестко связанным с корпусом тягового привода, причем ось поворота кронштейна совпадает с осью выходного вала рулевого привода, лежит в одной плоскости с осью второго рычага перпендикулярно ей и проходит через центр пятна контакта ходового колеса с опорной поверхностью, корпус рулевого механизма жестко связан с реактивной передачей второго рычага, причем передаточное отношение каждой из встроенных реактивных передач равно +1.
| Колесно-шагающий движитель | 1977 |
|
SU679465A1 |
| Колесно-шагающий движитель | 1979 |
|
SU887340A2 |
| Колесно-шагающий движитель | 1979 |
|
SU880852A1 |
| Колесно-шагающий движитель | 1980 |
|
SU921936A1 |
| Устройство для обеспечения движения транспортного средства в колесно-шагающем режиме | 1977 |
|
SU659446A1 |

