Для )аз,лич11ых становок авто-матичесгсого управления необходимо иметь ускорения, т. е. элемент, преобразующи11 механическое (чаще lipii вращательном движении) FJ пропорцио альпое ему электрическое напряжение. rSTa задача возникает, папример), н)11 автоматическом регули{)онании хода шахтных клетей.
Известны различные тины ;иггчпкон ускорения, в частности выполненные Б 5нде однофазно) ипдукционно машины, ротор KOTOpoii соед;-П ен с контролируемым валом.
С целью уве; ичения выходной мощности такого датчика, статор одиофазкой индукционной машипы выполнен вратцающимси и связан пружиной с ротором, а выходная обмотка размещена на статоре.
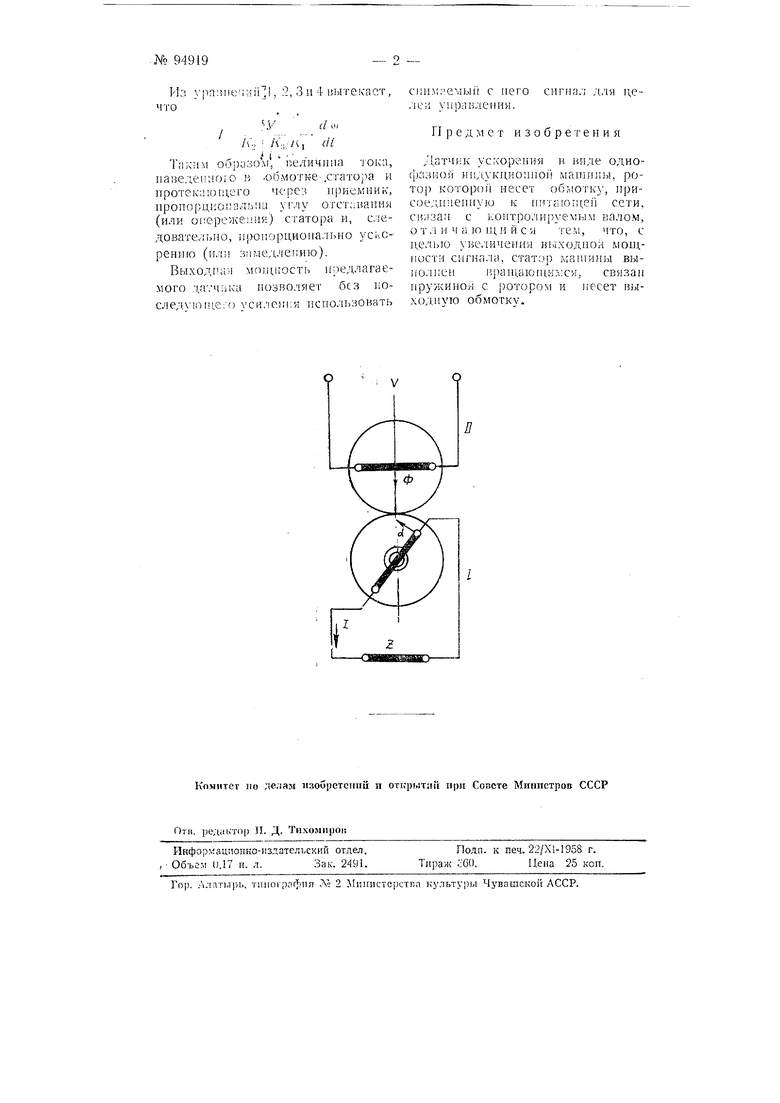
На чертеже показана электрическая с.хе.ма предлагаемого датчика ускорений с вращающимися статором / и роторо.м //.
Ротор // мехапически соединяется с валом, ускорение которого подлежит измерению. Статор / выполнен в виде инерционного тела и связан с ротором // спиральной . При врап.ении ротора вращается и статор.
па роторе размещена обмотка. иолучаюп;ая питание от стабилизировапного напряжения V переменного тока.(Направле1П1е магнитного потока Ф показано стрелкой). Обмотка статора, индуктивно связанная с обмоткой ротора, замкнута на сонротивление (нагрузку) Z, нредстав.чяюздее co6oi приемник сигналов ускорения.
В определенных пределах yivia рассогласования а ток / в приемнике Z нронордиона.чен углу:
/ /Л«.(1)
При наличии ускорения (/ш/й справедливо следующее равенство (пренебрегая трением плёток п трением в подшипниках):
57 Л4:) -Мп.(2)
at
где У момент инерции ротора; /Иэ-электромагнитный моме}гг взаимодействия между статоро.м и ротором:
Мэ---.К,-1,(3)
где Ло -постоянный коэффициент; . -момент, создаваемый пружиной:
Мгг-- К.л.(4)
Из ypniiiie niill. 2, 3 и 4 вытекает, что
У f/o.
di
T;iKH i образом, пеличипа тока, ианедениого в -обмотке.стато; а и протекающего через приемник, пропорцио1:аль;1и yi.iy отставания (или опережении) статора и, следовательно, ьроиорционально ускорению (или замедлению).
Выходпаи MOiiuiocTb предлагаемого л,а .чака позволяет без иоследхюшего усилепг;я пспользовать
синм. с пего
сигнал д.чя г,,е,ie;i уираилепия.
П р е д м е т и з о б р е т е н и я
;1 атч1:к ускорения li виде односрлзнои ии;:,укцио:п 0 РиГинппы, рото) KOTOpoii песет облютку, нрисоедииеппу о к питающей сети, связан с коптролнруечалм валом, о т л и ч а 10 щ и и с я тем, что, с целью у15еличепии выходпой Monj,постн сигна.ча, стат;)р крлпины выполнен 15рап1,аю пиА;си, связан пружиной с ротором и несет ВЫХОДНУЮ обмотку.