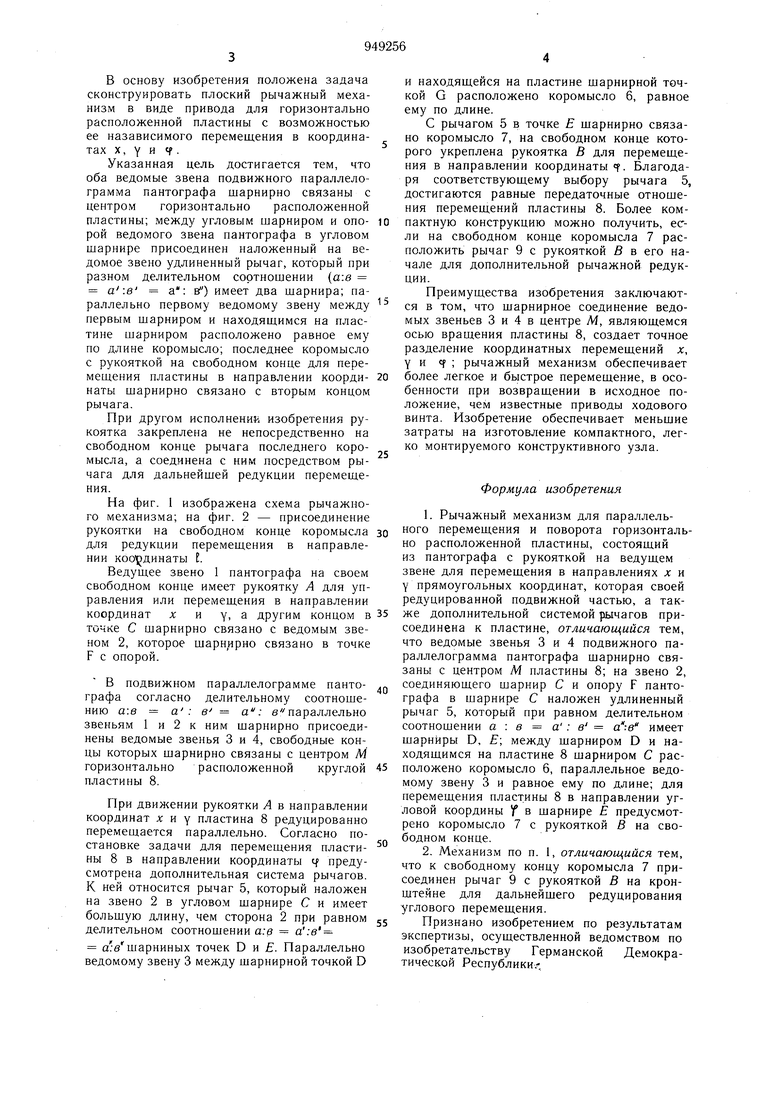
Изобретение относится к плоским рычажным механизмам для перемещения горизонтально расположенной пластины в прямоугольных координатах и для ее углового перемещения. Известны координатные столы, которые состоят из двух перемещающихся во взаимно перпендикулярных направлениях х и Y кареток, расположенных одна над другой. На верхней каретке располагается поворотный стол с приводимой в движение ходовым винтом вращающейся опорой для перемещения в направлении tf. Привод координатных столов осуществляется посредством автономного привода ходового винта или с помощью пантографа в качестве передаточного привода, свободной системе рычагов которого сообщается движение в направлениях х и у. Перемещение поворотного стола осуществляется также от привода хс)дового винта. Высокие требования к параллельности направляющих, а также применение абсолютно беззазорных вращающихся опор делают неэкономичным их использование. Известна Другая приводная система, где вместо координатного стола расположен установленный на трех щарах и параллельно перемещаемый самоустанавливающийся стол, который может иметь горизонтальные перемещения от манипулятора. Этот самоустанавливающийся стол посредством параллелограммной системы приводных рычагов соединен с основанием таким образом, что предотвращается его поворот относительно основания. По сравнению с устройством координатных столов использование самоустанавливающегося стола и его управление имеет преимущество, поскольку он имеет все степени свободы координатных столов, а затраты на его изготовление, включая проектирование, значительно ниже. Целью изобретения является проектирование системы привода для горизонтально расположенной пластины таким образом, чтобы получить имеющую преимущество работоспособную конструкцию при малых затратах стоимости, вре.мени и материалов. В основу изобретения положена задача сконструировать плоский рычажный механизм в виде привода для горизонтально расположенной пластины с возможностью ее назависимого перемещения в координатах X, Y и Ч. Указанная цель достигается тем, что оба ведомые звена подвижного параллелограмма пантографа шарнирно связаны с центром горизонтально расположенной пластины; между угловым шарниром и опорой ведомого звена пантографа в угловом шарнире присоединен наложенный на ведомое звено удлиненный рычаг, который при разном делительном соотношении (а:в а-.в в) имеет два шарнира; параллельно первому ведомому звену между первым шарниром и находящимся на пластине шарниром расположено равное ему по длине коромысло; последнее коромысло с рукояткой на свободном конце для перемещения пластины в направлении координаты шарнирно связано с вторым концом рычага. При другом исполнении изобретения рукоятка закреплена не непосредственно на свободном конце рычага последнего коромысла, а соединена с ним посредством рычага для дальнейшей редукции перемещения. На фиг. I изображена схема рычажного механизма; на фиг. 2 - присоединение рукоятки на свободном конце коромысла для редукции перемещения в направлении координаты Е. Ведущее звено 1 пантографа на своем свободном конце имеет рукоятку А для управления или перемещения в направлении координат л: и Y. 3 другим концом в точке С шарнирно связано с ведомым звеном 2, которое шарнирно связано в точке F с опорой. В подвижном параллелограмме пантографа согласно делительному соотношению а:в а: в 8 параллельно звеньям 1 и 2 к ним шарнирно присоединены ведомые звенья 3 и 4, свободные концы которых шарнирно связаны с центром М горизонтально расположенной круглой пластины 8. При движении рукоятки А в направлении координат д; и у пластина 8 редуцированно перемещается параллельно. Согласно постановке задачи для перемещения пластины 8 в направлении координаты tf предусмотрена дополнительная система рычагов. К ней относится рычаг 5, который наложен на звено 2 в угловом шарнире С и имеет большую длину, чем сторона 2 при равном делительном соотношении а:в а:в а вшарниных точек D и . Параллельно ведомому звену 3 между шарнирной точкой D И находящейся на пластине шарнирной точкой G расположено коромысло 6, равное ему по длине. С рычагом 5 в точке Е шарнирно связано коромысло 7, на свободном конце которого укреплена рукоятка В для перемещения в направлении координаты «f. Благодаря соответствующему выбору рычага 5, достигаются равные передаточные отношения перемещений пластины 8. Более компактную конструкцию можно получить, если на свободном конце коромысла 7 расположить рычаг 9 с рукояткой В в его начале для дополнительной рычажной редукции. Преимущества изобретения заключаются в том, что шарнирное соединение ведомых звеньев 3 и 4 в центре М, являющемся осью вращения пластины 8, создает точное разделение координатных перемещений х, Y и cf ; рычажный механизм обеспечивает более легкое и быстрое перемещение, в особенности при возвращении в исходное положение, чем известные приводы ходового винта. Изобретение обеспечивает меньшие затраты на изготовление компактного, легко монтируемого конструктивного узла. Формула изобретения 1.Рычажный механизм для параллельного перемещения и поворота горизонтально расположенной пластины, состоящий из пантографа с рукояткой на ведущем звене для перемещения в направлениях х и Y прямоугольных координат, которая своей редуцированной подвижной частью, а также дополнительной системой рычагов присоединена к пластине, отличающийся тем, что ведомые звенья 3 и 4 подвижного параллелограмма пантографа шарнирно связаны с центром М пластины 8; на звено 2, соединяющего шарнир С и опору F пантографа в шарнире С наложен удлиненный рычаг 5, который при равном делительном соотношении а : в а: в а-.в имеет щарнйры D, Е , между шарниром D и находящимся на пластине 8 шарниром С расположено коромысло 6, параллельное ведомому звену 3 и равное ему по длине; для перемещения пластины 8 в направлении угловой координы У в шарнире Е предусмотрено коромысло 7 с рукояткой В на свободном конце. 2.Механизм по п. 1, отличающийся тем, что к свободному концу коромысла 7 присоединен рычаг 9 с рукояткой В на кронштейне для дальнейшего редуцирования углового перемещения. Признано изобретением по результатам экспертизы, осуществленной ведомством по изобретательству Германской Демократической Республики.--.
У
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ТРАНСПОРТИРОВАНИЯ ТКАНИ ШВЕЙНОЙ МАШИНЫ (2 ВАРИАНТА) | 2004 |
|
RU2281352C1 |
| Раскладывающаяся конструкция | 1989 |
|
SU1763766A1 |
| КОСИЛКА | 2009 |
|
RU2406287C1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Устройство для определения контуров сечений челюстно-лицевой области | 1982 |
|
SU1255855A1 |
| Устройство для сварки неповоротныхСТыКОВ ТРуб | 1979 |
|
SU837680A1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
| НАВЕСНОЕ УСТРОЙСТВО К ЖАТКАМ КОМБАЙНА ДЛЯ УБОРКИ СЕЛЬСКОХОЗЯЙСТВЕННЫХ КУЛЬТУР | 2006 |
|
RU2316166C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С КРУГОВЫМ РЫЧАЖНЫМ ОСНОВАНИЕМ | 2017 |
|
RU2667236C1 |
| Прибор для вычерчивания эллипсов | 1976 |
|
SU640867A1 |
0/ .2
