Изобретение относится к механизмам, применяемым в технике для получения заданного движения ведомого звена.
Известен дельта-робот [Clavel R. Device for the movement and positioning of an element in space, US Patent No. 4976582, Dec.11, 1990], имеющий пространственную параллельную структуру и состоящий из трех рычагов, прикрепленных с помощью шарниров к основанию. В параллельных цепях механизма используются параллелограммы, позволяющие сохранять пространственную ориентацию выходного звена. Недостатком такого устройства является невозможность воспринимать выходным звеном большие нагрузки ввиду исполнения параллельных цепей в виде параллелограммов, а также ограниченное число степеней свободы выходного звена, равное четырем (линейные смещения вдоль каждой из трех осей координат и поворот вокруг оси, перпендикулярной основанию).
Наиболее близким к предлагаемому устройству является пространственный платформенный механизм параллельной структуры, приведенный в [Соu-lombe J., Bonev I.A. A New Rotary Hexapod for Micropositioning. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) Karlsruhe, Germany. 2013, pp. 877-880]. Механизм включает в свой состав неподвижное звено (стойку), выполненное в виде двух круговых направляющих, на которых посредством шести кареток установлены шесть соединительных кинематических цепей, обеспечивающие три выхода на выходное звено - платформу. Все звенья механизма соединяются между собой только вращательными кинематическими парами пятого класса (р5), общее число которых равно 36 (р5=36). При этом число подвижных звеньев механизма равно 31 (n=31). Таким образом, общая подвижность механизма определяется по формуле Малышева А.П., как

что гарантирует определенность движения выходного звена при задании движения каждому из шести ведущих звеньев, перемещающихся по круговым направляющим.
Данный механизм принимается за прототип предлагаемого устройства. Недостаток прототипа заключается в невозможности полного контроля движений платформы при использовании менее шести приводов, в частности, одного привода.
Техническая проблема заключается в создании такого механизма параллельной структуры, в котором движение платформы могло бы контролироваться единственным ведущим звеном.
Сущность заявляемого устройства заключается в том, что предлагается пространственный механизм с круговым рычажным основанием, включающий стойку, выполненную в виде замкнутой круговой направляющей, выходное звено, шесть соединительных кинематических цепей, входящих с выходным звеном в три вращательные кинематические пары и шарнирно установленных на шести каретках на круговой направляющей, при этом внутри круговой направляющей установлен плоский рычажный механизм основания, включающий ведущее звено, образующее с круговой направляющей три вращательные кинематические пары, расположенные в центре и оппозитно по диаметру круговой направляющей, причем каретки шарнирно соединены с дополнительными шатунами, соединенными посредством коромысел с основными шатунами, соединенными в свою очередь с ведущим звеном, при этом все кинематические пары звеньев механизма основания выполнены с вертикальными осями, а основные и дополнительные шатуны со стороны соединения с коромыслами имеют ячеистые пазы, в которых установлены фиксаторы с разным диаметром поперечного сечения, фиксируемые штифтами. Фиксаторы могут быть выполнены цилиндрическими или коническими.
Технический результат заключается в установке внутри круговой направляющей нового одноподвижного механизма, звенья которого соединены с каретками, на которые устанавливаются шесть соединительных кинематических цепей, удерживающих выходное звено, обладающее полным комплексом относительных движений.
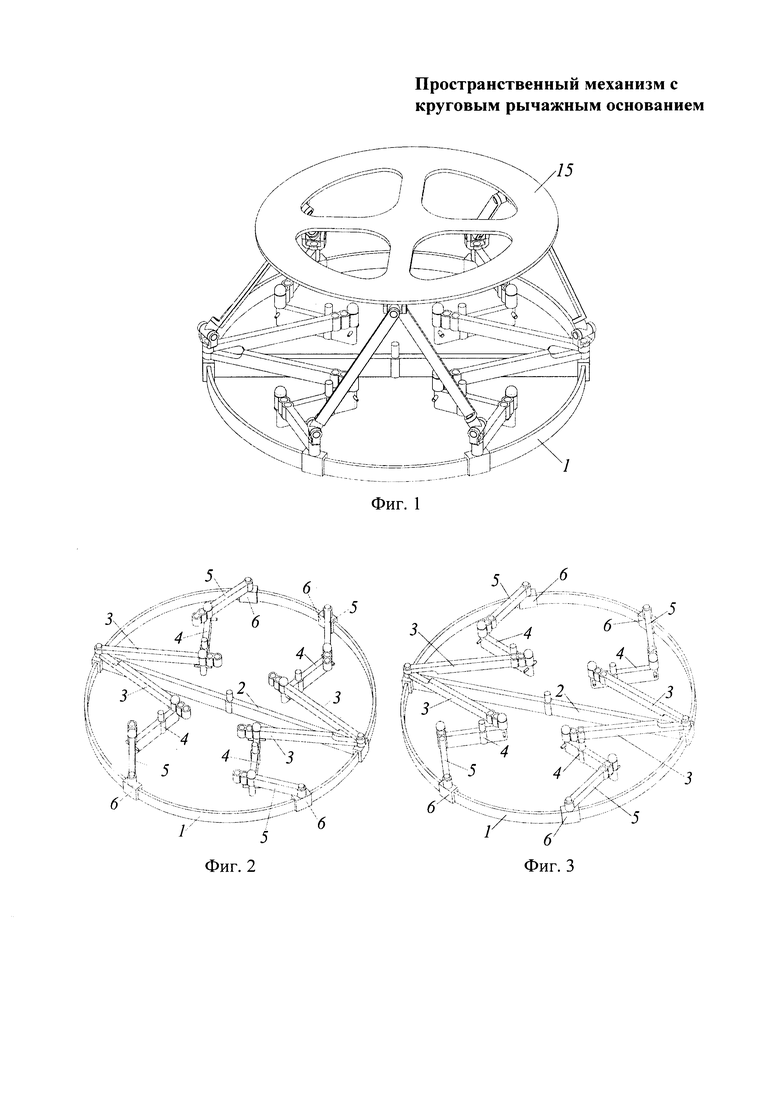
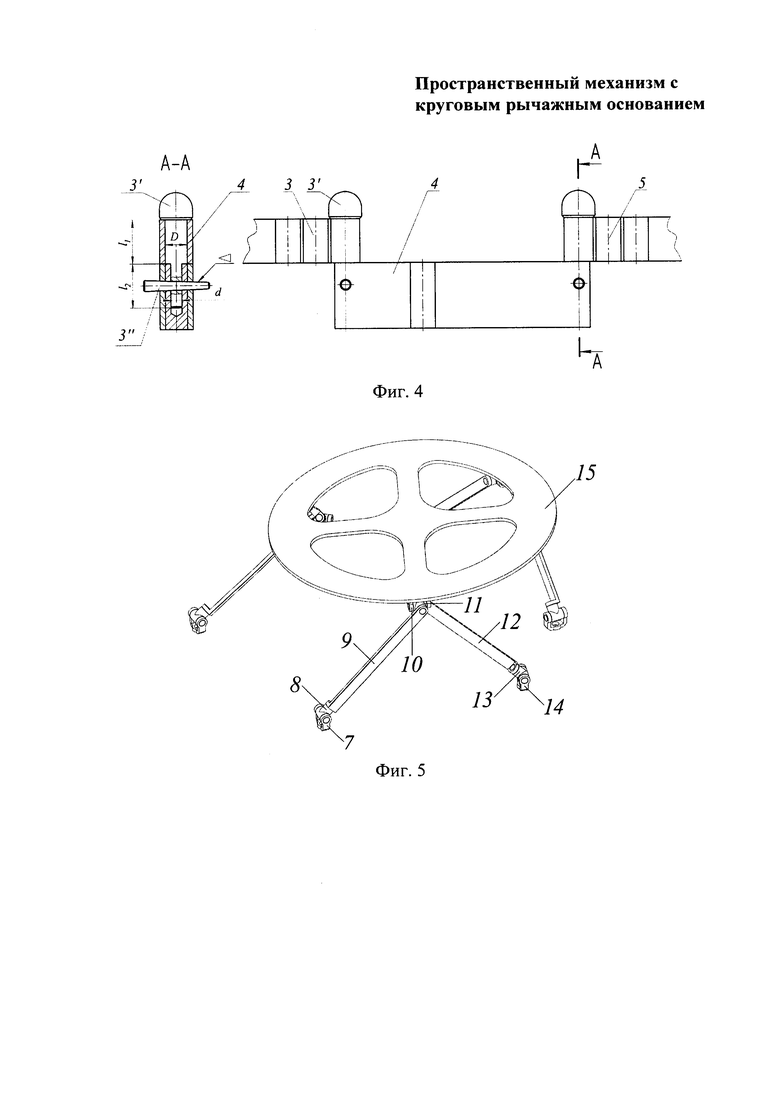
На фиг. 1 показан одноподвижный пространственный механизм с круговым рычажным основанием. На фиг. 2 показан одноподвижный плоский рычажный механизм основания с минимальными длинами шатунов. На фиг. 3 показан одноподвижный плоский рычажный механизм основания с максимальными длинами шатунов. На фиг. 4 показан принцип соединения коромысел с шатунами посредством цилиндрических фиксаторов. На фиг. 5 показана пространственная кинематическая цепь параллельной структуры.
Пространственный механизм с круговым рычажным основанием состоит из стойки 1, ведущего звена 2, основных шатунов 3, коромысел 4, дополнительных шатунов 5, кареток 6, соединительных цепей, включающих звенья 7-14, и выходного звена 15 (платформы). Кинематические пары звеньев 1-2, 2-3, 3-4, 4-5, 5-6 и 6-1 выполнены вращательными с вертикальными осями. Кинематические пары звеньев 7-8, 8-9, 9-10, 10-11, 10-15, 11-12, 12-13, 13-14, 14-3, 7-5 выполнены вращательными.
Механизм, приведенный на фиг. 1, образуется путем объединения плоского подвижного основания, изображенного на фиг. 2 и 3, и пространственной кинематической цепи параллельной структуры, показанной на фиг. 5. Шатуны 3 и 5 механизма основания (фиг. 2 и 3) выполнены с одной стороны с ячеистыми пазами, позволяющими изменять положения шарниров 3-4 и 4-5. Такой конструктивный дизайн дает возможность изменять длины шатунов 3 и 5 в механизме, получая разные траектории движения выходного звена. На фиг. 2 механизм основания представлен с минимальными длинами шатунов, а на фиг. 3-е максимальными, когда шарниры 3-4 и 4-5 ориентированы в крайних ячейках. Изменение длин шатунов достигается применением фиксаторов 3/, которые устанавливаются в определенной ячейке каждого шатуна. Фиксатор может быть выполнен цилиндрическим или коническим. На фиг. 4 показано коромысло 4, образующее шарниры 3-4 и 4-5 с основным шатуном 3 и дополнительным шатуном 4. Цилиндрический фиксатор 3/ имеет две ступени с разными диаметрами сечения - больший в области контакта с шатуном (D) и меньший в области контакта с коромыслом (d), т.е. D>d. Длины обеих ступеней фиксатора  и
и  принимаются равными между собой, т.е.
принимаются равными между собой, т.е.  Глубина отверстия для цилиндрического фиксатора в коромысле 4 выполнена больше, чем длина фиксатора -для упора заплечиками в корпус звена 4 с целью исключения выпирания фиксатора 3/. Фиксатор 3/ становится единым со звеном 3 путем установки конического штифта 3//.
Глубина отверстия для цилиндрического фиксатора в коромысле 4 выполнена больше, чем длина фиксатора -для упора заплечиками в корпус звена 4 с целью исключения выпирания фиксатора 3/. Фиксатор 3/ становится единым со звеном 3 путем установки конического штифта 3//.
Механизм основания включает 17 подвижных звеньев (n=17) и 25 вращательных кинематических пар (p5=25). По известной формуле подвижности Чебышева П.Л. число степеней свободы такого механизма определится по формуле

это гарантирует определенность движения всех звеньев этого механизма при задании движения ведущему звену 2. Оно соединяется с круговой направляющей 1 основания посредством трех вращательных кинематических пар - одной в центре и двух по диаметру основания. На обоих концах звена 2 установлены каретки 6, выполненные с ним за одно целое.
На каждую из кареток 6, движущихся по круговой направляющей 1, посредством вращательных пар устанавливается пространственная кинематическая цепь параллельной структуры, показанная на фиг. 5. Она включает 25 звеньев (n=25), соединенных в 30 вращательных кинематических пар (р5=30). Число степеней свободы такой кинематической цепи по формуле (1) определится, как W=0, что характеризует ее, как группу нулевой подвижности. При соединении этой группы с одноподвижным основанием (фиг. 2 и 3), получим пространственный механизм с одной степенью подвижности, где движение выходного звена 15 - платформы контролируется поворотом ведущего звена 2, поворачивающегося в плоскости основания. При этом выходное звено 15 имеет шесть степеней свободы, то есть оно может беспрепятственно смещаться и поворачиваться относительно всех трех осей декартовых координат. Движение выходного звена 15 оказывается полностью контролируемым поворотом ведущего звена 2.
Принцип работы механизма заключается в следующем. При повороте ведущего звена 2 на некоторый угол, движение передается через подвижные звенья основания 3, 4 и 5 кареткам 6 для их ориентации относительно круговой направляющей 1. При этом соединительные цепи звеньев 7-14, установленные на каретках 6 посредством вращательных шарниров, передают движение на платформу 15, ориентируя ее на заданные углы и расстояния относительно круговой направляющей 1. Для изменения траектории движения платформы 15, длины шатунов 3 и 5 могут быть изменены путем перемещения цилиндрических фиксаторов 3/ в другие ячейки и зафиксированы коническими штифтами 3//.
Применение такого механизма целесообразно для задания пространственной ориентации и перемещения объектов, а также для выполнения операций, требующих движение по заданной траектории. Предлагаемый механизм может быть использован в качестве основания для создания медицинского оборудования, например, применяться в конструкциях манипуляционных операционных столов для наклонов и перемещений пациентов в процессе хирургических процедур.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ДЛЯ МИКРОПОЗИЦИОНИРОВАНИЯ | 2018 |
|
RU2674357C1 |
| ПРОСТРАНСТВЕННЫЙ РЫЧАЖНЫЙ РЕГУЛИРУЕМЫЙ МЕХАНИЗМ | 2002 |
|
RU2207461C1 |
| УСТРОЙСТВО ДЛЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2017 |
|
RU2674370C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2013 |
|
RU2548087C1 |
| ПРОСТРАНСТВЕННЫЙ G-РОБОТ | 2021 |
|
RU2758392C1 |
| РЫЧАЖНЫЙ ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2019 |
|
RU2727456C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2008 |
|
RU2369430C1 |
| КРУГОВОЙ ПРОСТРАНСТВЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2758385C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
| ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2758607C1 |
Изобретение относится к механизмам, применяемым в технике для получения заданного движения ведомого звена. Задачей изобретения является создание такого механизма параллельной структуры, в котором движение платформы могло бы контролироваться единственным ведущим звеном. Технический результат достигается тем, что внутри круговой направляющей установлен плоский рычажный механизм основания, включающий ведущее звено, образующее с направляющей три вращательные кинематические пары, расположенные в центре и оппозитно по диаметру круговой направляющей, при этом каретки шарнирно соединены с дополнительными шатунами, соединенными посредством коромысел с основными шатунами, соединенными в свою очередь с ведущим звеном, при этом все кинематические пары звеньев механизма основания выполнены с вертикальными осями, а основные и дополнительные шатуны со стороны соединения с коромыслами имеют ячеистые пазы, в которых установлены фиксаторы с разным диаметром поперечного сечения, фиксируемые штифтами. 2 з.п. ф-лы, 5 ил.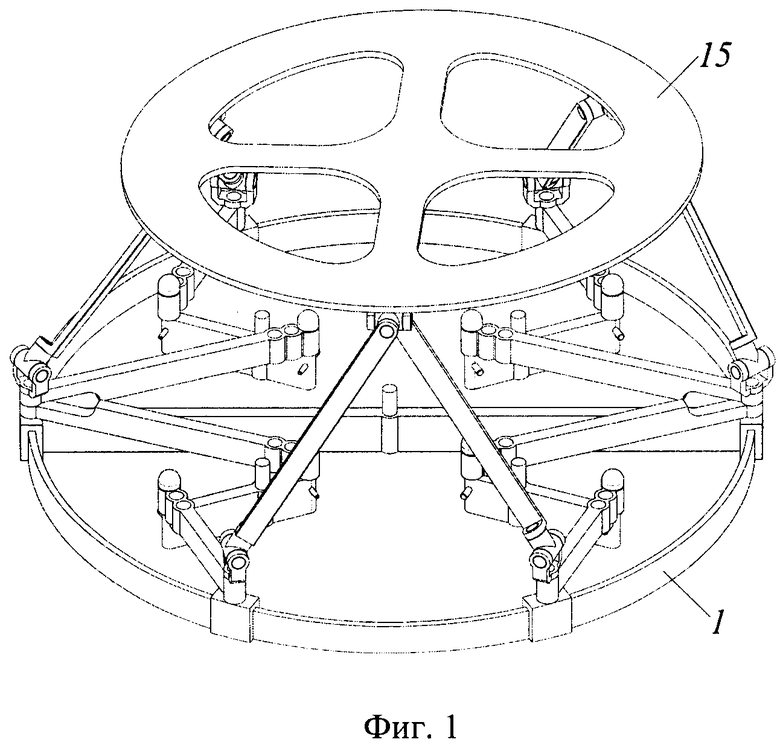
1. Пространственный механизм с круговым рычажным основанием, включающий стойку, выполненную в виде замкнутой круговой направляющей, выходное звено, шесть соединительных кинематических цепей, входящих с выходным звеном в три вращательные кинематические пары и шарнирно установленных на шести каретках на круговой направляющей, отличающийся тем, что внутри круговой направляющей установлен плоский рычажный механизм основания, включающий ведущее звено, образующее с круговой направляющей три вращательные кинематические пары, расположенные в центре и оппозитно по диаметру круговой направляющей, причем каретки шарнирно соединены с дополнительными шатунами, соединенными посредством коромысел с основными шатунами, соединенными в свою очередь с ведущим звеном, при этом все кинематические пары звеньев механизма основания выполнены с вертикальными осями, а основные и дополнительные шатуны со стороны соединения с коромыслами имеют ячеистые пазы, в которых установлены фиксаторы с разным диаметром поперечного сечения, фиксируемые штифтами.
2. Пространственный механизм по п. 1, отличающийся тем, что фиксаторы выполнены цилиндрическими.
3. Пространственный механизм по п. 1, отличающийся тем, что фиксаторы выполнены коническими.
| US 4976582 A1, 11.12.1990 | |||
| ДЕФЕКТОСКОП ДЛЯ КОНТРОЛЯ НЕМЕТАЛЛИЧЕСКИХПОКРЫТИЙ | 0 |
|
SU160612A1 |
| Светокопировальные рамы для чертежей | 1930 |
|
SU24239A1 |
| US 20130183128 A1, 18.07.2013 | |||
| US 8303238 B2, 06.11.2012 | |||
| US 6532840 B2, 18.03.2003. | |||

